 STM32 + MPU6050设计便携式Mini桌面时钟
STM32 + MPU6050设计便携式Mini桌面时钟

一、环境介绍
姿态传感器:MPU6050
温度传感器:DS18B20
编译软件: keil5
二、功能介绍
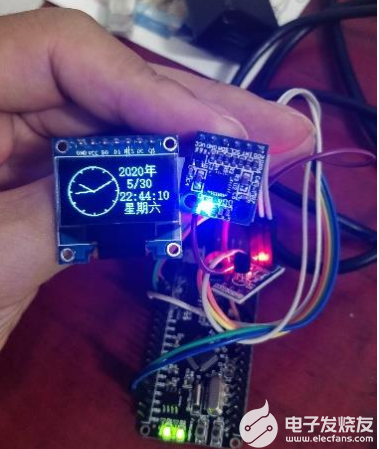
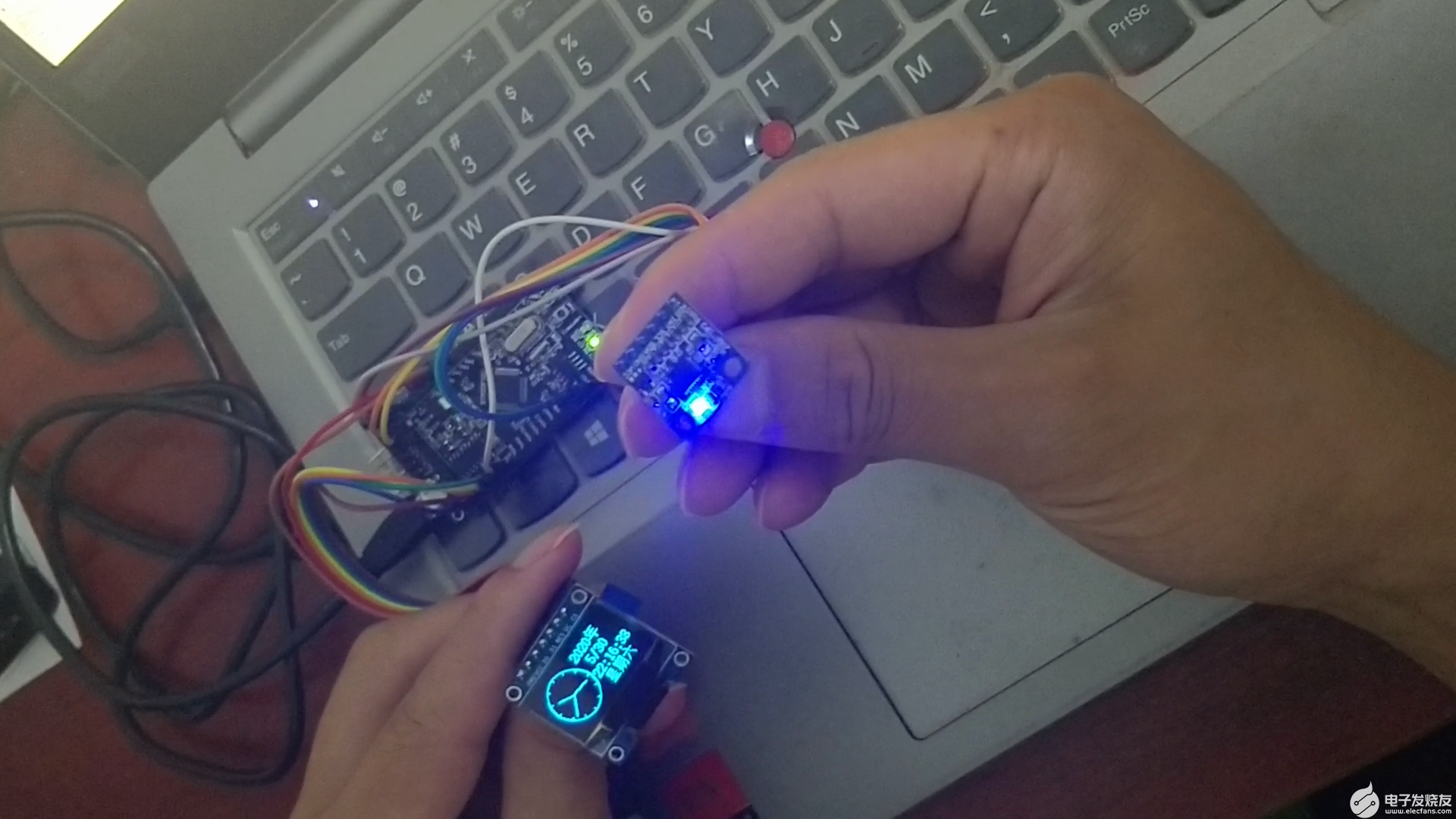
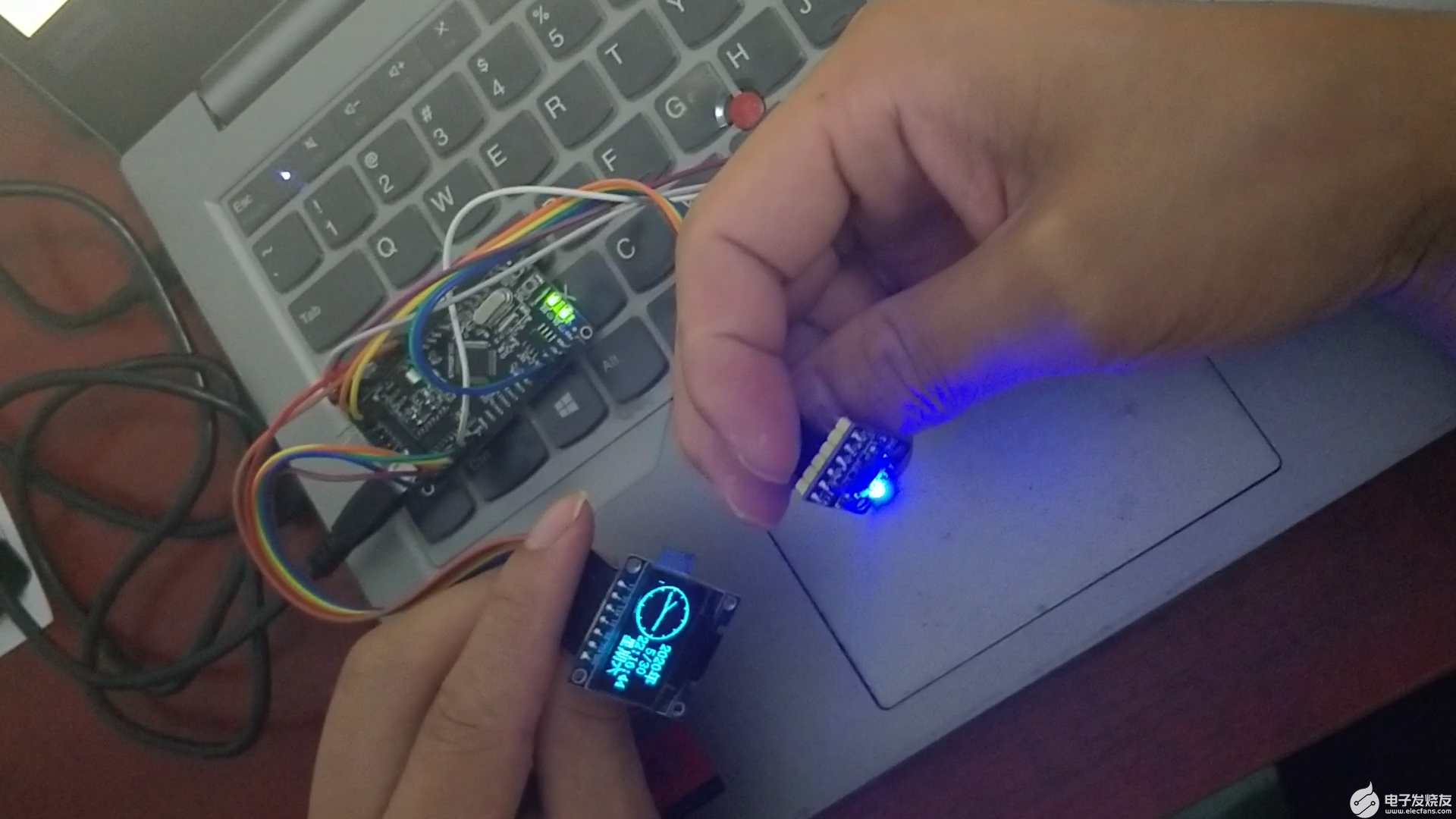
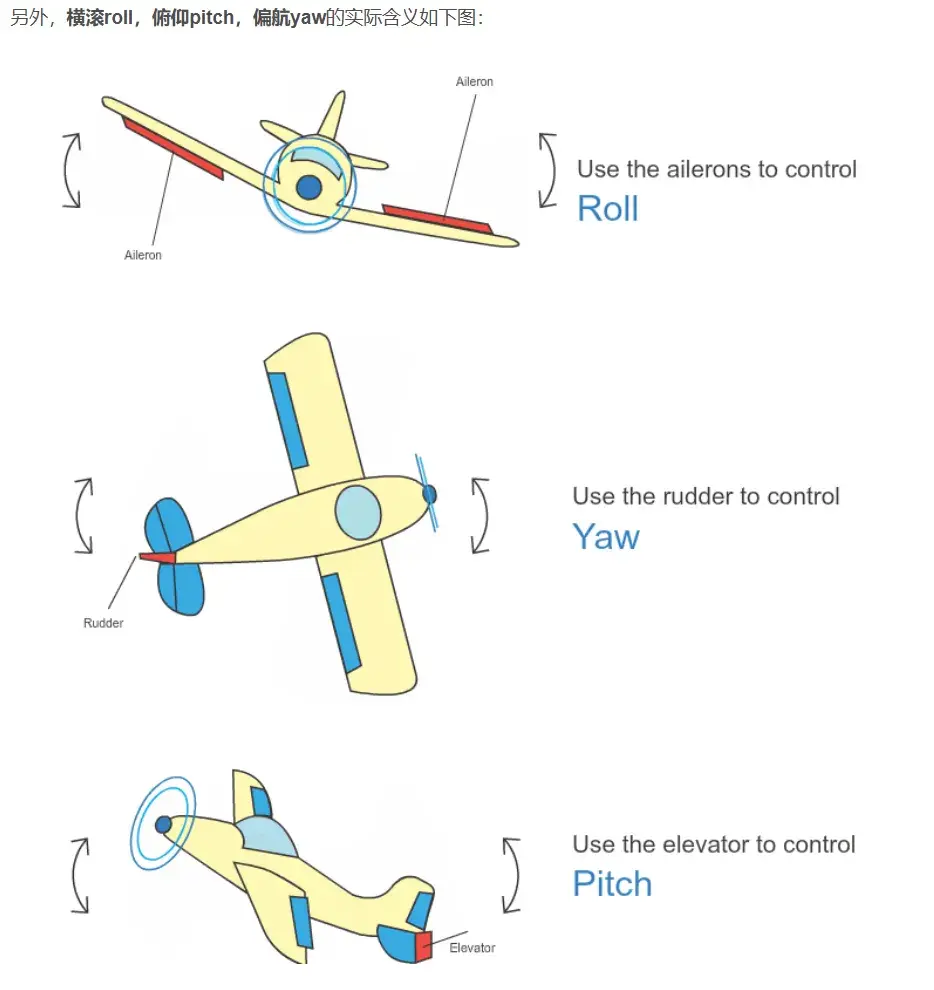
时钟可以根据MPU6050测量的姿态自动调整显示画面方向,也就是倒着拿、横着拿、反着拿都可以让时间显示是正对着自己的,时间支持自己调整,支持串口校准。可以按键切换页面查看环境温度显示。

支持串口时间校准:
三、核心代码
3.1 main.c
#include "stm32f10x.h"
#include "beep.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include
#include
#include "exti.h"
#include "timer.h"
#include "rtc.h"
#include "wdg.h"
#include "ds18b20.h"
#include "oled.h"
#include "fontdata.h"
#include "adc.h"
#include "FunctionConfig.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
/*
函数功能: 绘制时钟表盘框架
*/
void DrawTimeFrame(void)
{
u8 i;
OLED_Circle(32,32,31);//画外圆
OLED_Circle(32,32,1); //画中心圆
//画刻度
for(i=0;i<60;i++)
{
if(i%5==0)OLED_DrawAngleLine(32,32,6*i,31,3,1);
}
OLED_RefreshGRAM(); //刷新数据到OLED屏幕
}
/*
函数功能: 更新时间框架显示,在RTC中断里调用
*/
char TimeBuff[20];
void Update_FrameShow(void)
{
/*1. 绘制秒针、分针、时针*/
OLED_DrawAngleLine2(32,32,rtc_clock.sec*6-6-90,27,0);//清除之前的秒针
OLED_DrawAngleLine2(32,32,rtc_clock.sec*6-90,27,1); //画秒针
OLED_DrawAngleLine2(32,32,rtc_clock.min*6-6-90,24,0);
OLED_DrawAngleLine2(32,32,rtc_clock.min*6-90,24,1);
OLED_DrawAngleLine2(32,32,rtc_clock.hour*30-6-90,21,0);
OLED_DrawAngleLine2(32,32,rtc_clock.hour*30-90,21,1);
//绘制电子钟时间
sprintf(TimeBuff,"%d",rtc_clock.year);
OLED_ShowString(65,16*0,16,TimeBuff); //年份字符串
OLED_ShowChineseFont(66+32,16*0,16,4); //显示年
sprintf(TimeBuff,"%d/%d",rtc_clock.mon,rtc_clock.day);
OLED_ShowString(75,16*1,16,TimeBuff); //月
if(rtc_clock.sec==0)OLED_ShowString(65,16*2,16," "); //清除多余的数据
sprintf(TimeBuff,"%d:%d:%d",rtc_clock.hour,rtc_clock.min,rtc_clock.sec);
OLED_ShowString(65,16*2,16,TimeBuff); //秒
//显示星期
OLED_ShowChineseFont(70,16*3,16,5); //星
OLED_ShowChineseFont(70+16,16*3,16,6); //期
OLED_ShowChineseFont(70+32,16*3,16,rtc_clock.week+7); //具体的值
}
u8 DS18B20_TEMP_Info[10]; //DS18B20温度信息
/*
函数功能: DS18B20温度显示页面
*/
void DS18B20_ShowPageTable(short DS18B20_temp)
{
char DS18B20_buff[10]; //存放温度信息
unsigned short DS18B20_intT=0,DS18B20_decT=0; //温度值的整数和小数部分
DS18B20_intT = DS18B20_temp >> 4; //分离出温度值整数部分
DS18B20_decT = DS18B20_temp & 0xF; //分离出温度值小数部分
sprintf((char*)DS18B20_TEMP_Info,"%d.%d",DS18B20_intT,DS18B20_decT); //保存DS18B20温度信息,发送给上位机
OLED_ShowString(34,0,16,"DS18B20");
if(DS18B20_temp==0xFF)
{
OLED_ShowString(0,30,16," "); //清除一行的显示
//显示温度错误信息
OLED_ShowString(0,30,16,"DS18B20 Error!");
}
else
{
sprintf(DS18B20_buff,"%sC ",DS18B20_TEMP_Info);
//显示温度
OLED_ShowString(40,30,16,DS18B20_buff);
}
}
int main(void)
{
u8 stat;
u8 key_val;
u32 TimeCnt=0;
u16 temp_data; //温度数据
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temp;
float pitch,roll,yaw; //欧拉角
u8 page_cnt=0; //显示的页面
u8 display_state1=0;
u8 display_state2=0;
BEEP_Init(); //初始化蜂鸣器
LED_Init(); //初始化LED
KEY_Init(); //按键初始化
DS18B20_Init(); //DS18B20
USARTx_Init(USART1,72,115200);//串口1的初始化
TIMERx_Init(TIM1,72,20000); //辅助串口1接收。20ms为一帧数据。
RTC_Init(); //RTC初始化
OLED_Init(0xc8,0xa1); //OLED显示屏初始化--正常显示
//OLED_Init(0xc0,0xa0); //OLED显示屏初始化--翻转显示
while(MPU6050_Init()) //初始化MPU6050
{
printf("MPU6050陀螺仪初始化失败!\r\n");
DelayMs(500);
}
// //注意:陀螺仪初始化的时候,必须正常摆放才可以初始化成
// while(mpu_dmp_init())
// {
// printf("MPU6050陀螺仪设置DMP失败!\r\n");
// DelayMs(1000);
// }
OLED_Clear(0x00); //清屏
DrawTimeFrame(); //画时钟框架
while(1)
{
key_val=KEY_GetValue();
if(key_val)
{
page_cnt=!page_cnt;
//时钟页面
if(page_cnt==0)
{
//清屏
OLED_Clear(0);
DrawTimeFrame(); //画时钟框架
RTC->CRH|=1<<0; //开启秒中断
}
else if(page_cnt==1)
{
//清屏
OLED_Clear(0);
RTC->CRH&=~(1<<0); //关闭秒中断
}
}
if(USART1_RX_STATE)
{
//*20200530154322
//通过串口1校准RTC时间
if(USART1_RX_BUFF[0]=='*')
{
rtc_clock.year=(USART1_RX_BUFF[1]-48)*1000+(USART1_RX_BUFF[2]-48)*100+(USART1_RX_BUFF[3]-48)*10+(USART1_RX_BUFF[4]-48)*1;
rtc_clock.mon=(USART1_RX_BUFF[5]-48)*10+(USART1_RX_BUFF[6]-48)*1;
rtc_clock.day=(USART1_RX_BUFF[7]-48)*10+(USART1_RX_BUFF[8]-48)*1;
rtc_clock.hour=(USART1_RX_BUFF[9]-48)*10+(USART1_RX_BUFF[10]-48)*1;
rtc_clock.min=(USART1_RX_BUFF[11]-48)*10+(USART1_RX_BUFF[12]-48)*1;
rtc_clock.sec=(USART1_RX_BUFF[13]-48)*10+(USART1_RX_BUFF[14]-48)*1;
RTC_SetTime(rtc_clock.year,rtc_clock.mon,rtc_clock.day,rtc_clock.hour,rtc_clock.min,rtc_clock.sec);
OLED_Clear(0); //OLED清屏
DrawTimeFrame();//画时钟框架
}
USART1_RX_STATE=0;
USART1_RX_CNT=0;
}
//时间记录
DelayMs(10);
TimeCnt++;
if(TimeCnt>=100) //1000毫秒一次
{
TimeCnt=0;
LED1=!LED1;
temp_data=DS18B20_ReadTemp();
// printf("temp_data=%d.%d\n",temp_data>>4,temp_data&0xF);
// stat=mpu_dmp_get_data(&pitch,&roll,&yaw);
// temp=MPU6050_Get_Temperature(); //得到温度值
//MPU6050_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪原始数据
MPU6050_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
//printf("温度数据:%d\r\n",temp);
// printf("陀螺仪原始数据 :x=%d y=%d z=%d\r\n",gyrox,gyroy,gyroz);
printf("加速度传感器数据:x=%d y=%d z=%d\r\n",aacx,aacy,aacz);
// printf("欧垃角:横滚角=%d 俯仰角=%d 航向角=%d\r\n",(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
//
//正着显示
if(aacz>=15000)
{
printf("正着显示\n");
if(display_state1!=1)
{
display_state2=0;
display_state1=1;
OLED_Init(0xc8,0xa1); //OLED显示屏初始化--正常显示
}
}
//翻转显示
else if(display_state2!=1)
{
printf("反着显示\n");
display_state1=0;
display_state2=1;
OLED_Init(0xc0,0xa0); //OLED显示屏初始化--翻转显示
}
}
if(page_cnt==1) //温度显示页面
{
DS18B20_ShowPageTable(temp_data);
}
}
}
3.2 mpu6050.c
#include "mpu6050.h"
#include "sys.h"
#include "delay.h"
#include
/*--------------------------------------------------------------------IIC协议底层模拟时序--------------------------------------------------------------------------------*/
/*
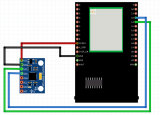
硬件接线:
1 VCC 3.3V/5V 电源输入 --->接3.3V
2 GND 地线 --->接GND
3 IIC_SDA IIC 通信数据线 -->PB6
4 IIC_SCL IIC 通信时钟线 -->PB7
5 MPU_INT 中断输出引脚 ---->未接
6 MPU_AD0 IIC 从机地址设置引脚-->未接
AD0引脚说明:ID=0X68(悬空/接 GND) ID=0X69(接 VCC)
*/
/*
函数功能:MPU IIC 延时函数
*/
void MPU6050_IIC_Delay(void)
{
DelayUs(2);
}
/*
函数功能: 初始化IIC
*/
void MPU6050_IIC_Init(void)
{
RCC->APB2ENR|=1<<3; //先使能外设IO PORTB时钟
GPIOB->CRL&=0X00FFFFFF; //PB6/7 推挽输出
GPIOB->CRL|=0X33000000;
GPIOB->ODR|=3<<6; //PB6,7 输出高
}
/*
函数功能: 产生IIC起始信号
*/
void MPU6050_IIC_Start(void)
{
MPU6050_SDA_OUT(); //sda线输出
MPU6050_IIC_SDA=1;
MPU6050_IIC_SCL=1;
MPU6050_IIC_Delay();
MPU6050_IIC_SDA=0;//START:when CLK is high,DATA change form high to low
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
/*
函数功能: 产生IIC停止信号
*/
void MPU6050_IIC_Stop(void)
{
MPU6050_SDA_OUT();//sda线输出
MPU6050_IIC_SCL=0;
MPU6050_IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=1;
MPU6050_IIC_SDA=1;//发送I2C总线结束信号
MPU6050_IIC_Delay();
}
/*
函数功能: 等待应答信号到来
返 回 值:1,接收应答失败
0,接收应答成功
*/
u8 MPU6050_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
MPU6050_SDA_IN(); //SDA设置为输入
MPU6050_IIC_SDA=1;MPU6050_IIC_Delay();
MPU6050_IIC_SCL=1;MPU6050_IIC_Delay();
while(MPU6050_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
MPU6050_IIC_Stop();
return 1;
}
}
MPU6050_IIC_SCL=0;//时钟输出0
return 0;
}
/*
函数功能:产生ACK应答
*/
void MPU6050_IIC_Ack(void)
{
MPU6050_IIC_SCL=0;
MPU6050_SDA_OUT();
MPU6050_IIC_SDA=0;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=1;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=0;
}
/*
函数功能:不产生ACK应答
*/
void MPU6050_IIC_NAck(void)
{
MPU6050_IIC_SCL=0;
MPU6050_SDA_OUT();
MPU6050_IIC_SDA=1;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=1;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=0;
}
/*
函数功能:IIC发送一个字节
返回从机有无应答
1,有应答
0,无应答
*/
void MPU6050_IIC_Send_Byte(u8 txd)
{
u8 t;
MPU6050_SDA_OUT();
MPU6050_IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
MPU6050_IIC_SDA=(txd&0x80)>>7;
txd<<=1;
MPU6050_IIC_SCL=1;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=0;
MPU6050_IIC_Delay();
}
}
/*
函数功能:读1个字节,ack=1时,发送ACK,ack=0,发送nACK
*/
u8 MPU6050_IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
MPU6050_SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
MPU6050_IIC_SCL=0;
MPU6050_IIC_Delay();
MPU6050_IIC_SCL=1;
receive<<=1;
if(MPU6050_READ_SDA)receive++;
MPU6050_IIC_Delay();
}
if(!ack)
MPU6050_IIC_NAck();//发送nACK
else
MPU6050_IIC_Ack(); //发送ACK
return receive;
}
/*--------------------------------------------------------------------MPU6050底层驱动代码--------------------------------------------------------------------------------*/
/*
函数功能:初始化MPU6050
返 回 值:0,成功
其他,错误代码
*/
u8 MPU6050_Init(void)
{
u8 res;
MPU6050_IIC_Init();//初始化IIC总线
MPU6050_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
DelayMs(100);
MPU6050_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU6050_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU6050_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU6050_Set_Rate(50); //设置采样率50Hz
MPU6050_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU6050_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU6050_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU6050_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU6050_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU6050_ADDR)//器件ID正确
{
MPU6050_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU6050_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU6050_Set_Rate(50); //设置采样率为50Hz
}else return 1;
return 0;
}
/*
设置MPU6050陀螺仪传感器满量程范围
fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
返回值:0,设置成功
其他,设置失败
*/
u8 MPU6050_Set_Gyro_Fsr(u8 fsr)
{
return MPU6050_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
/*
函数功能:设置MPU6050加速度传感器满量程范围
函数功能:fsr:0,±2g;1,±4g;2,±8g;3,±16g
返 回 值:0,设置成功
其他,设置失败
*/
u8 MPU6050_Set_Accel_Fsr(u8 fsr)
{
return MPU6050_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
/*
函数功能:设置MPU6050的数字低通滤波器
函数参数:lpf:数字低通滤波频率(Hz)
返 回 值:0,设置成功
其他,设置失败
*/
u8 MPU6050_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU6050_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
/*
函数功能:设置MPU6050的采样率(假定Fs=1KHz)
函数参数:rate:4~1000(Hz)
返 回 值:0,设置成功
其他,设置失败
*/
u8 MPU6050_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU6050_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return MPU6050_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
/*
函数功能:得到温度值
返 回 值:返回值:温度值(扩大了100倍)
*/
short MPU6050_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
MPU6050_Read_Len(MPU6050_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;;
}
/*
函数功能:得到陀螺仪值(原始值)
函数参数:gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
返 回 值:0,成功,其他,错误代码
*/
u8 MPU6050_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU6050_Read_Len(MPU6050_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
/*
函数功能:得到加速度值(原始值)
函数参数:gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
返 回 值:0,成功,其他,错误代码
*/
u8 MPU6050_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU6050_Read_Len(MPU6050_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
/*
函数功能:IIC连续写
函数参数:
addr:器件地址
reg:寄存器地址
len:写入长度
buf:数据区
返 回 值:0,成功,其他,错误代码
*/
u8 MPU6050_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU6050_IIC_Start();
MPU6050_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU6050_IIC_Wait_Ack()) //等待应答
{
MPU6050_IIC_Stop();
return 1;
}
MPU6050_IIC_Send_Byte(reg); //写寄存器地址
MPU6050_IIC_Wait_Ack(); //等待应答
for(i=0;i;i++)>
3.3 mpu6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "stm32f10x.h"
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//重力加速度值,单位:9.5 m/s2
typedef struct
{
float accX;
float accY;
float accZ;
}accValue_t;
//因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2) 从AD0接地机地址为:0X68
u8 MPU6050_Init(void); //初始化MPU6050
u8 MPU6050_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写
u8 MPU6050_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读
u8 MPU6050_Write_Byte(u8 reg,u8 data); //IIC写一个字节
u8 MPU6050_Read_Byte(u8 reg); //IIC读一个字节
u8 MPU6050_Set_Gyro_Fsr(u8 fsr);
u8 MPU6050_Set_Accel_Fsr(u8 fsr);
u8 MPU6050_Set_LPF(u16 lpf);
u8 MPU6050_Set_Rate(u16 rate);
u8 MPU6050_Set_Fifo(u8 sens);
short MPU6050_Get_Temperature(void);
u8 MPU6050_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU6050_Get_Accelerometer(short *ax,short *ay,short *az);
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU6050_ADDR 0X68
//IO方向设置
#define MPU6050_SDA_IN() {GPIOB->CRL&=0XF0FFFFFF;GPIOB->CRL|=8<<24;}
#define MPU6050_SDA_OUT() {GPIOB->CRL&=0XF0FFFFFF;GPIOB->CRL|=3<<24;}
//IO操作函数
#define MPU6050_IIC_SCL PBout(7) //SCL
#define MPU6050_IIC_SDA PBout(6) //SDA
#define MPU6050_READ_SDA PBin(6) //输入SDA
//IIC所有操作函数
void MPU6050_IIC_Delay(void); //MPU IIC延时函数
void MPU6050_IIC_Init(void); //初始化IIC的IO口
void MPU6050_IIC_Start(void); //发送IIC开始信号
void MPU6050_IIC_Stop(void); //发送IIC停止信号
void MPU6050_IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 MPU6050_IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 MPU6050_IIC_Wait_Ack(void); //IIC等待ACK信号
void MPU6050_IIC_Ack(void); //IIC发送ACK信号
void MPU6050_IIC_NAck(void); //IIC不发送ACK信号
#endif
完整项目源码下载地址:https://download.csdn.net/download/xiaolong1126626497/18657534
审核编辑:符乾江
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STM32
+关注
关注
2313文章
11195浏览量
374645 -
时钟
+关注
关注
11文章
1999浏览量
135233
发布评论请先 登录
相关推荐
热点推荐
GF1021 单相便携式电能表测试系统
GF1021单相便携式电能表测试系统用于测试单相电能表的误差,采用成熟的信号合成和功率放大技术,高精度电压源和电流源输出。广泛应用于实验室和现场,然后作为单相标准源。便携式仪表测试设备通过7英寸彩色触摸屏或外部接口提供高功能,并结合出色的菜单引导操作。
发表于 04-15 16:33
9TCS1085:便携式设备的多功能解决方案
9TCS1085:便携式设备的多功能解决方案 在便携式设备的设计中,时钟合成、温度监控以及风扇控制是至关重要的环节。Renesas的9TCS1085作为一款高度可编程的集成电路,集成了时钟
探索DS1673便携式系统控制器:低功耗便携产品的理想选择
丰富的功能和出色的性能,成为了众多工程师的首选。今天,我们就来深入了解一下这款控制器。 文件下载: DS1673.pdf 一、DS1673概述 DS1673将低功耗便携式产品所需的多种功能集成于单芯片中,提供实时时钟(RTC)、非易失性随机存取存储器(NV RAM)控制器
便携式腐蚀环境采样仪
腐蚀便携式环境监测是环境监测领域的重要细分方向,主要应用于各类户外、现场场景,可精准捕捉环境中易引发腐蚀的各类参数,为设备防护、环境治理提供科学数据支撑。2022年,昱栎技术团队聚焦该领域的便携化
CW32L012读取MPU6050姿态数据
随着物联网、可穿戴设备、工业倾角检测等场景的普及,低成本、低功耗的姿态检测方案成为嵌入式领域的研究热点。MPU6050 作为集成三轴加速度计和三轴陀螺仪的六轴传感器,凭借低成本、小体积的优势被

用dma加iic读取mpu6050数据遇到的疑问求解
我在用dma加iic读取mpu6050数据时,试着用dma传输4个数,但是用freemaster查看数据以后,发现只有数组里面的第一个数有值,其他的都为0,而且发现没进dma传输完成中断,把传输数量改成1以后,就能进入dma传输完成中断,就好像dma只能传输一个数一样,有没有大佬知道这是怎么回事啊
发表于 12-09 07:41
TT电机,Arduino Uno,L298N 5AD ,MPU6050最简自平衡机器人资料
;MPU6050_6Axis_MotionApps20.h\" //https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
MPU6050
发表于 10-06 13:12
便携式EL检测仪:光伏组件缺陷检测的 “便携显微镜”
便携式EL检测仪:光伏组件缺陷检测的 “便携显微镜”柏峰【BF-EL】便携式 EL(Electroluminescence,电致发光)检测仪,是基于光伏组件电致发光原理设计的便携式检测

便携式高光谱相机的核心技术与应用优势
在当今快速发展的科技时代,便携式高光谱相机作为一种新兴的检测工具,正逐步改变各行各业的工作方式。您是否在寻找更精准的测量设备,以满足日常工作中的需求?或者在考虑如何提升数据采集的效率和质量?便携式高

便携式烟气分析仪和在线式连续监测仪哪个好?
在环保监管趋严与工业智能化并行的今天,烟气排放监测已成为企业合规运营的核心环节。便携式烟气分析仪与在线式连续监测仪作为两大主流工具,如何根据需求选择?本文从应用场景、技术特性、成本效益三大维度展开
发表于 08-11 15:52
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
本示例将演示使用 DMP6 从 MPU6050 获取数据。MPU6050 配备了数字运动处理器 (DMP),用于处理运动算法的计算,如转换为三轴偏航/俯仰/滚动平面、转换为四元数或转换为欧拉角。




评论