 3D霍尔效应传感器为自主移动机器人提供实时位置控制
3D霍尔效应传感器为自主移动机器人提供实时位置控制

随着工业 4.0 的先进制造工艺席卷全球市场,高度自动化系统的需求急剧增长,这些系统既需要在集成的制造流程中运行,又需要不断收集流程控制数据。大多数此类系统(包括机械臂中的磁性编码器、接近传感器、传动器、压力变送器、线性电机和自主移动机器人)均需要先进的位置感应解决方案来控制性能并收集工厂级数据,从而做出更明智的决策并提高设备运行的安全性和可靠性。
图 1 中所示自主移动机器人可以自动执行简单的任务,例如在仓库内运输物料。这类工业机器人可帮助优化制造流程、增加生产量并提高生产率。要在工厂车间或仓库实现安全高效导航,自主移动机器人的轮子必须内置位置感应和速度控制等高精度系统控制功能。
图 1:自主移动机器人横穿仓库
可控制运动的高性能自动化系统几乎都需要位置感应,并且位置感应技术的选择直接影响整个系统的成本和性能。在评估出色的位置感应解决方案,需要考虑传感器精度、速度、功率、灵活性和可靠性等因素。
多轴线性霍尔效应位置传感器可提供高度精确、快速且可靠的绝对位置测量,非常适合精密自动化工业应用。这些功能有助于实现更加准确的实时控制,此类控制在提高设备性能、优化系统效率和更大限度地减少停机时间方面发挥着至关重要的作用。
再看一下自主移动机器人的例子,图 2 中的方框图展示了轮子的电机和电机控制器之间形成的反馈环路。其中使用的是 TI 的 TMAG5170 线性 3D 霍尔效应位置传感器,可监测电机轴的确切角度位置和电机驱动器,从而使电机旋转。除了此反馈环路中显示的所有元素外,该线性 3D 霍尔效应传感器通常会对系统带宽和延迟有直接影响。通过采用能够进行高带宽测量的传感器,您可以提高此反馈环路的整体速度并增强系统性能。
同样,位置传感器的测量精度决定了对电机运动的可控程度。而传感器的速度和精度通常此消彼长,系统性能因此受到限制。TMAG5170 可实现高吞吐量数据读取,感应速度高达 20 kSPS,并且可进行高精度线性测量,最大总误差为 2.6%,让您无需在两者中做出抉择。
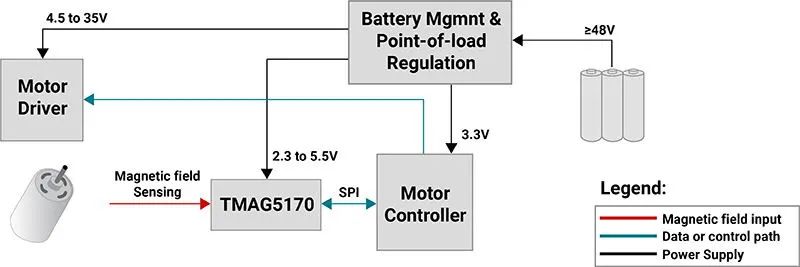
图 2:采用TMAG5170线性3D霍尔效应位置传感器的自主移动机器人轮子电机模块方框图
功耗可能也是选择位置传感器时的重要考量项,具体取决于设计的电池管理系统或电源。电池供电型系统或采用低功耗电源的系统(例如,远程 4 mA 至 20 mA 环路供电)通常需要具备低功耗运行模式(例如,唤醒和睡眠以及深度睡眠模式)的传感器来帮助提高吞吐量的同时降低功耗。TMAG5170 具有多个运行模式和采样率。与其他精密线性 3D 霍尔效应传感器相比,其电源效率至少能提升 70%,可在 1 kHz 至 20 kHz 采样范围内为电池供电器件或关注系统效率的轻负载模式降低功耗。
通常情况下,位置传感器具有严格的机械配置限制。线性 3D 霍尔效应传感器功能丰富,具有可选磁性灵敏度范围和温度补偿选项,可方便您灵活进行磁性和机械设计。TMAG5170 具有片上角度计算引擎,无需片外处理,同时提供角度感应应用中传感器和磁体的机械放置灵活性,包括轴上和偏轴情况下的配置。
由于在自动化操作中工业系统与人工配合日益密切,因此需要更多安全措施来确保操作安全,此外,对用于防止工具停机和质量问题的诊断功能的需求也不断增加。选择位置传感器时,除精度、速度、功率和灵活性等因素外,读数可靠性也是一个重要因素。例如,如果选择具有少量或根本不具有诊断功能的传感器,则可能需要大量外部元件来确保传感器数据的准确性和可靠性,这会增加设计的物料清单(BOM)成本。TMAG5170 具有独特的智能诊断功能组合,例如通信、连续性和内部信号路径检查,以及可针对电源、输入磁场和系统温度进行配置的诊断功能。无需其他元件即可确保传感器数据准确,从而实现长期可靠性并降低 BOM 成本。
高速高精度的位置传感器在自动化工业系统中实现了新一代实时控制技术。TMAG5170 等精密线性 3D 霍尔效应传感器可帮助设计人员实现快速、精确且可靠的测量,而无需降低性能或增加功耗和成本,从而进一步推动工业 4.0 市场发展趋势。
原文标题:技术干货 | 3D 霍尔效应传感器如何在自治系统中实现精准的实时位置控制
文章出处:【微信公众号:德州仪器】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
传感器
+关注
关注
2577文章
55502浏览量
793933 -
机器人
+关注
关注
213文章
31442浏览量
223643 -
3D
+关注
关注
9文章
3022浏览量
115563
原文标题:技术干货 | 3D 霍尔效应传感器如何在自治系统中实现精准的实时位置控制
文章出处:【微信号:德州仪器,微信公众号:tisemi】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论