 机器人主板需求配置参数的详细介绍
机器人主板需求配置参数的详细介绍

机器人越来越多地成为人类工作和生活的好助手。双赞主板应用的机器人在3C行业、食品制造和医药行业、陶瓷卫浴、物流仓储、塑胶行业等行业广泛运用。
作为机器人的核心——主板,一直是机器人开发的重点。机器人主板,包括处理器,与处理器相连接的显示系统,信号处理系统,执行系统,操作键盘,以及提供主板电能的供电系统,所述信号处理系统包括用于接收外部指令和信息的无线接收模块,用于发送信息的无线发射模块,用于增强认别能力的红外接收和发射模块,对主板进行遥控的无线遥控模块。所述机器人主板配置齐全,具备电池供应系统,可独立运行,也能够给相邻机器人传达信号,唤醒呼叫,从而实现机器人组团,可以分工完成动作和命令。那么,机器人主板需求配置参数有哪些呢?双赞工控给大家分享一下!
型号:双赞SZ3390
主板尺寸 :146mm×102mm
CPU :Rockchip RK3399 (28 纳米 HKMG 制程) ,ARM 六核 64 位处理器,高至主频 2.0GHz ,基于 big.LITTLE 大小核架构,双核 Cortex-A72(大核)+四核 Cortex-A53(小核)
GPU :四核 ARM Mali-T860 ,支持 OpenGL ES 1.1/2.0/3.0/3.1,OpenVG1.1,OpenCL,Directx11,支持 AFBC(帧缓冲压缩)
内存 :板载 2G DDR3 双通道高速内存(可选 DDR3 4G)
内置存储 :板载 16G EMMC5.1 高速存储(可选 MAX.64G) ,1 个 TF 卡槽,可支持 MAX.64G TF 卡
显示屏接口 :支持 LVDS 接口(单双路 6 位,8 位,10 位),支持分辨率大至 1080P ,支持 eDP 1.3(4 线,10.8Gbps),可选支持双通道 MIPI-DSI ,支持 HDMI 接口,支持分辨率大至 4K×2K@60HZ ,支持双屏同显/异显功能(LVDS+eDP,HDMI+eDP,HDMI+LVDS)
网络支持 :千兆以太网,支持 WiFi2.4G+5G/BT4.2,3G/4G 模块接口(Mini-PCIE)
触摸屏 :提供 I2C 接口(支持多点电容触摸) ,USB 接口(支持多点红外触摸,多点电容触摸,多点电阻触摸,多点纳米膜触摸,多点声波触摸,多点光学触摸)
视频播放 :支持 wmv、avi、flv、rm、rmvb、mpeg 、ts、mp4 等
图片格式 :支持 BMP、JPEG、PNG、GIF 等
USB :5 个 USB PH2.0-4P 插座,2 个 USB3.0 接口,其中 USB-OTG 支持 adb 调试
串口 :2 个 RS232(可选 TTL),2 个 TTL(可选 RS232)1 个 TTL(可选 RS485),1 个 TTL 调试口
GPIO :4 路 IO,可选输出输入
音频输出 :1 个 3.5mm 耳机插座,1 个 PH2.0-2P MIC 输入插座 ,板载 4R/3W×2 功放(可选 4R/10W×2 功放),左右声道输出
供电 :DC-12V 输入
散热:被动全铝散热器(可选主动带风扇)
相对湿度 :0%-90%相对湿度,无冷凝
工作温度 :0℃-60℃
编辑:fqj
-
机器人
+关注
关注
214文章
31665浏览量
224580 -
主板
+关注
关注
55文章
2433浏览量
77461
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案
端侧智联:机器人主板架构革新与边缘计算的协同进化
智能AI机器人定制开发_AI陪伴对话机器人主板方案

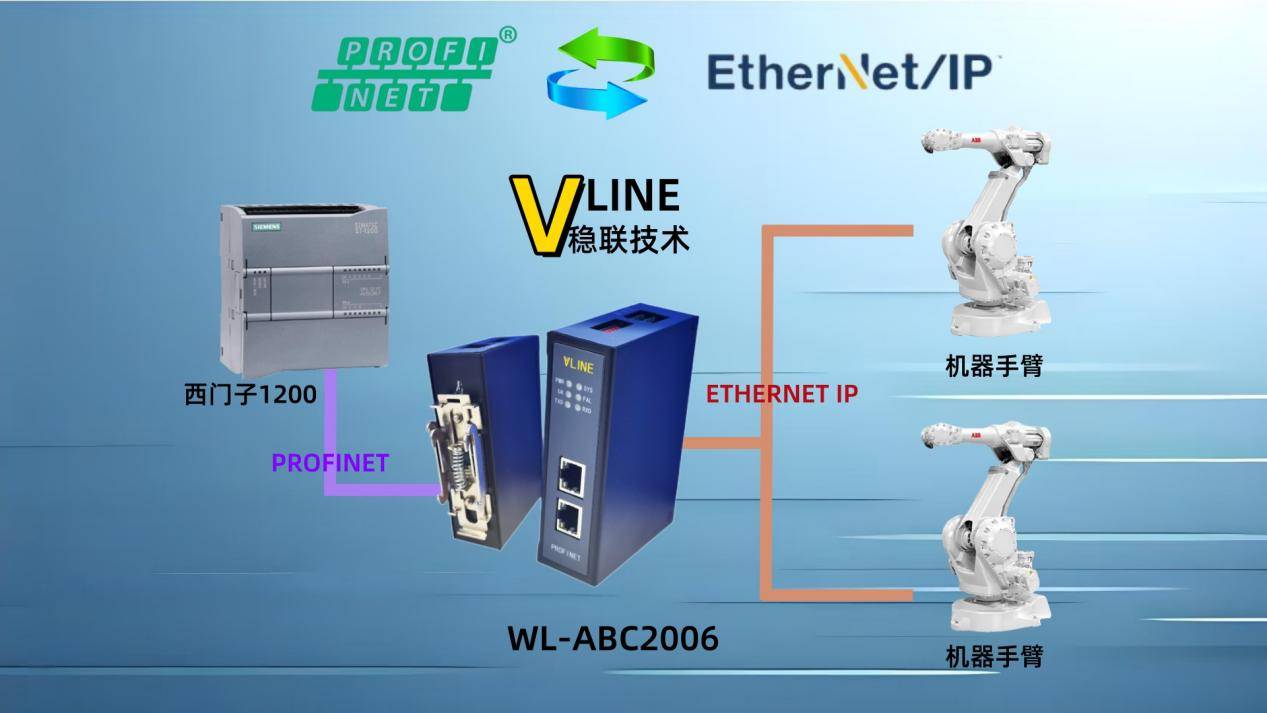
极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(上集)
从边侧到端侧: 边缘计算与机器人主板的融合创新
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
自制巡线解迷宫机器人(上)
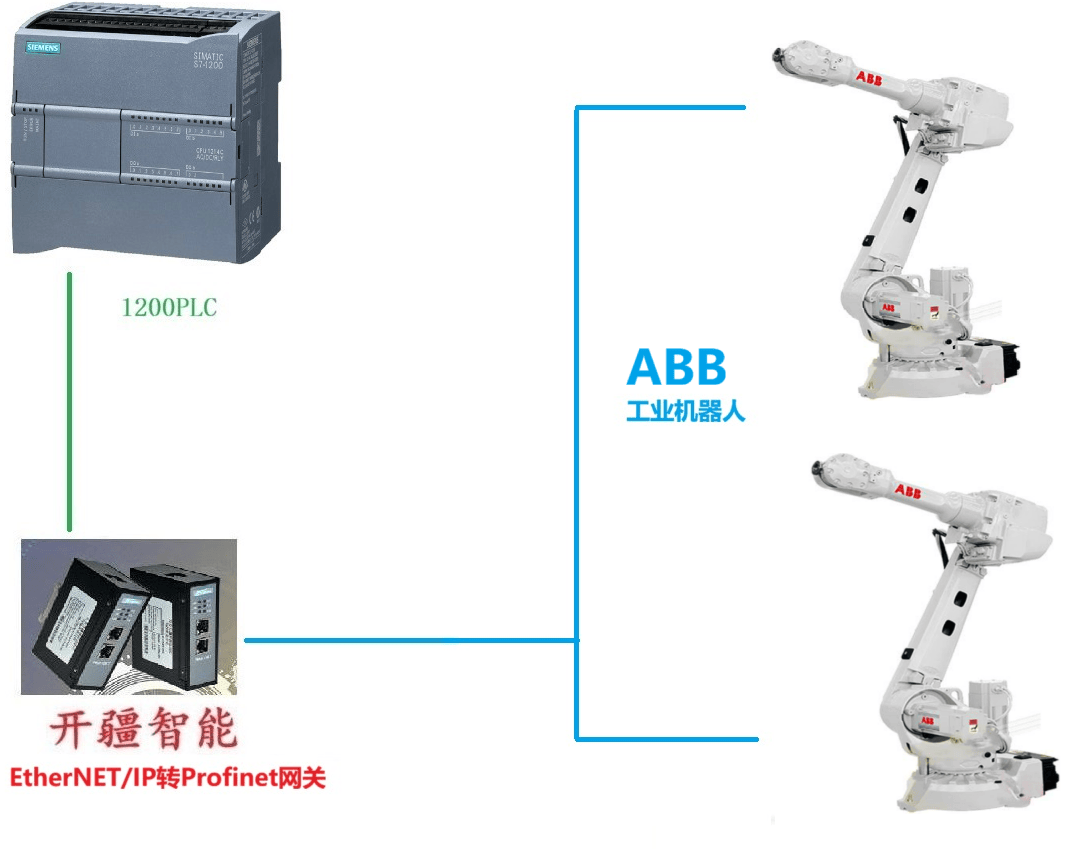
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
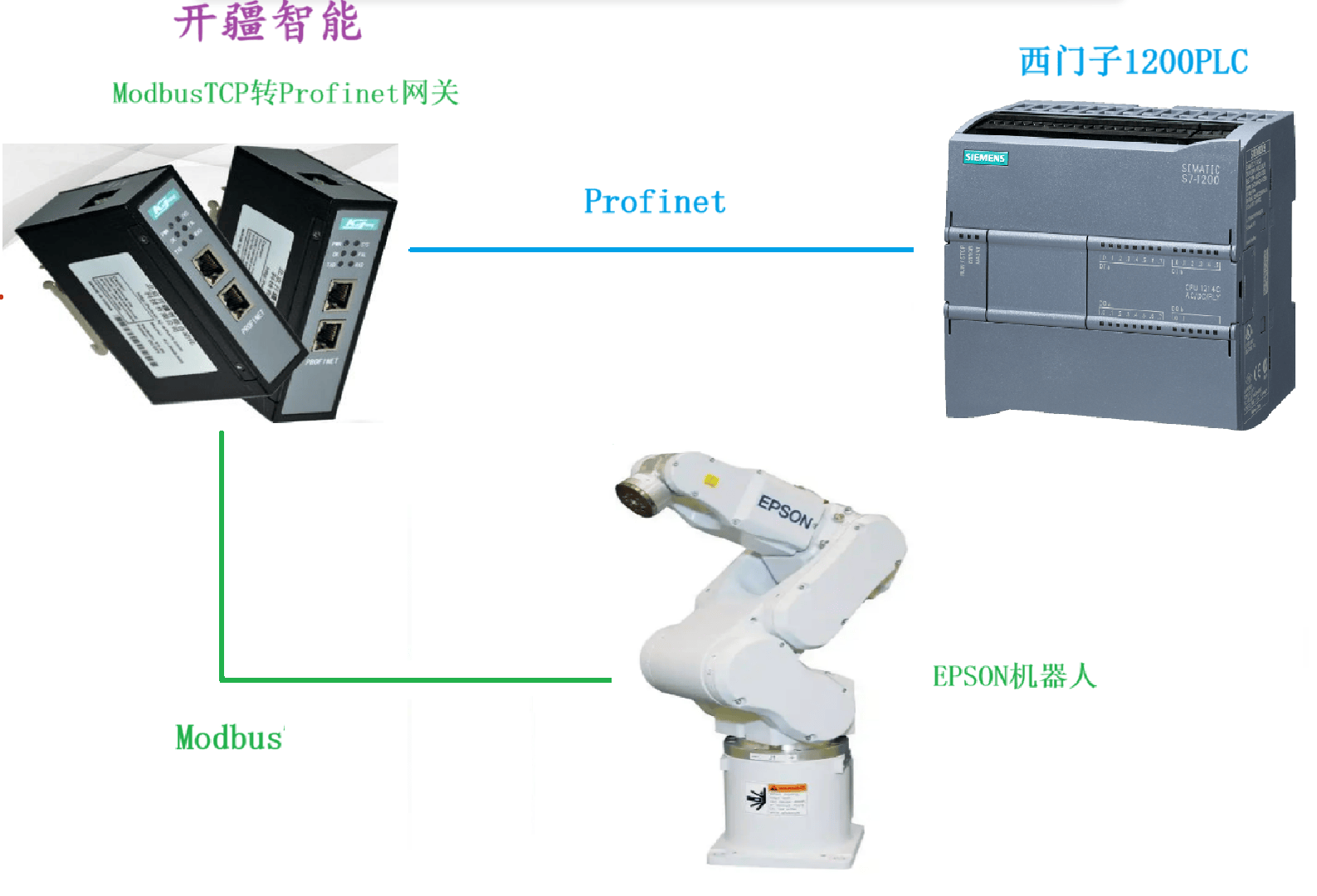
开疆智能ModbusTCP转Profinet网关连接EPSON机器人配置案例
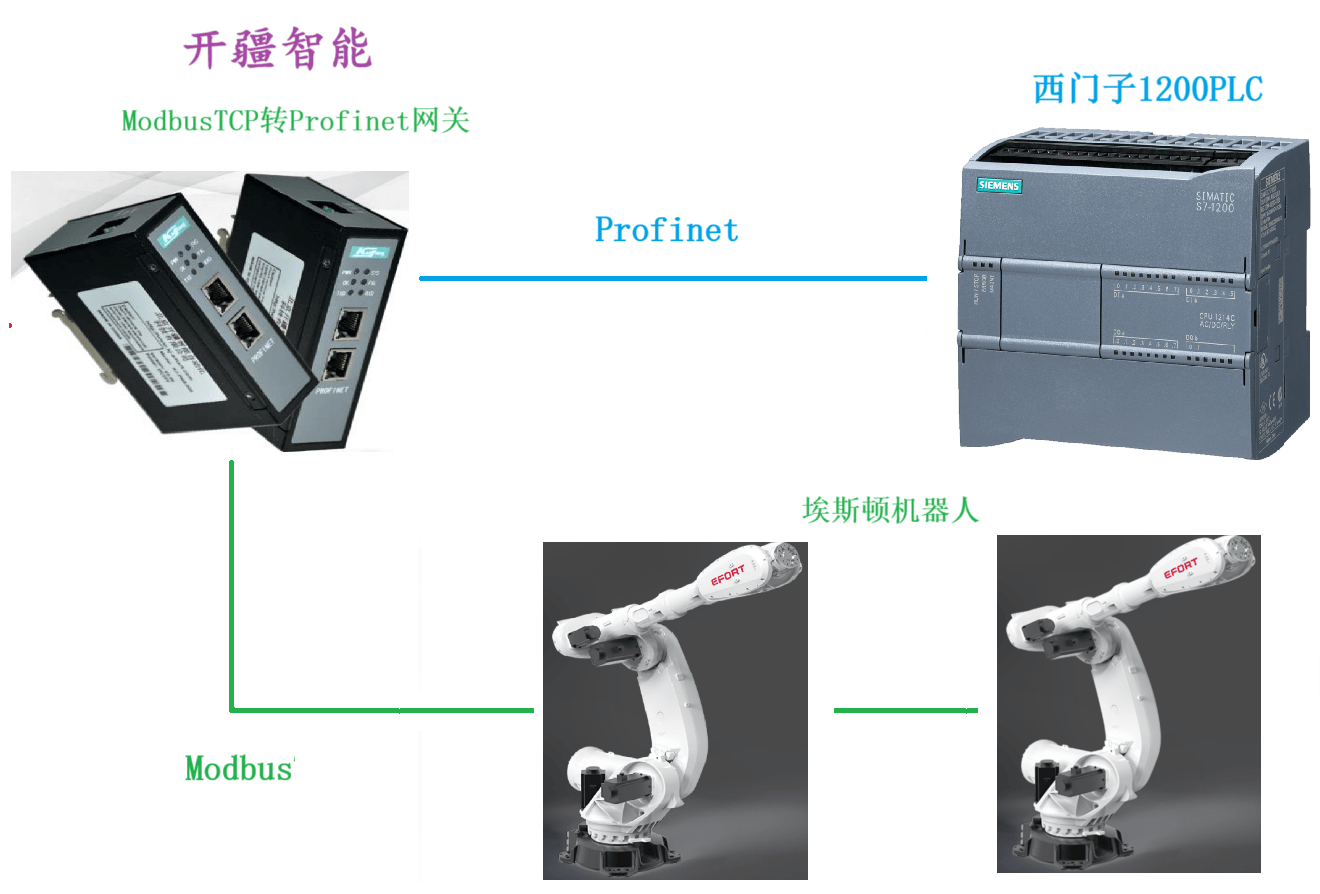
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
工业机器人的特点
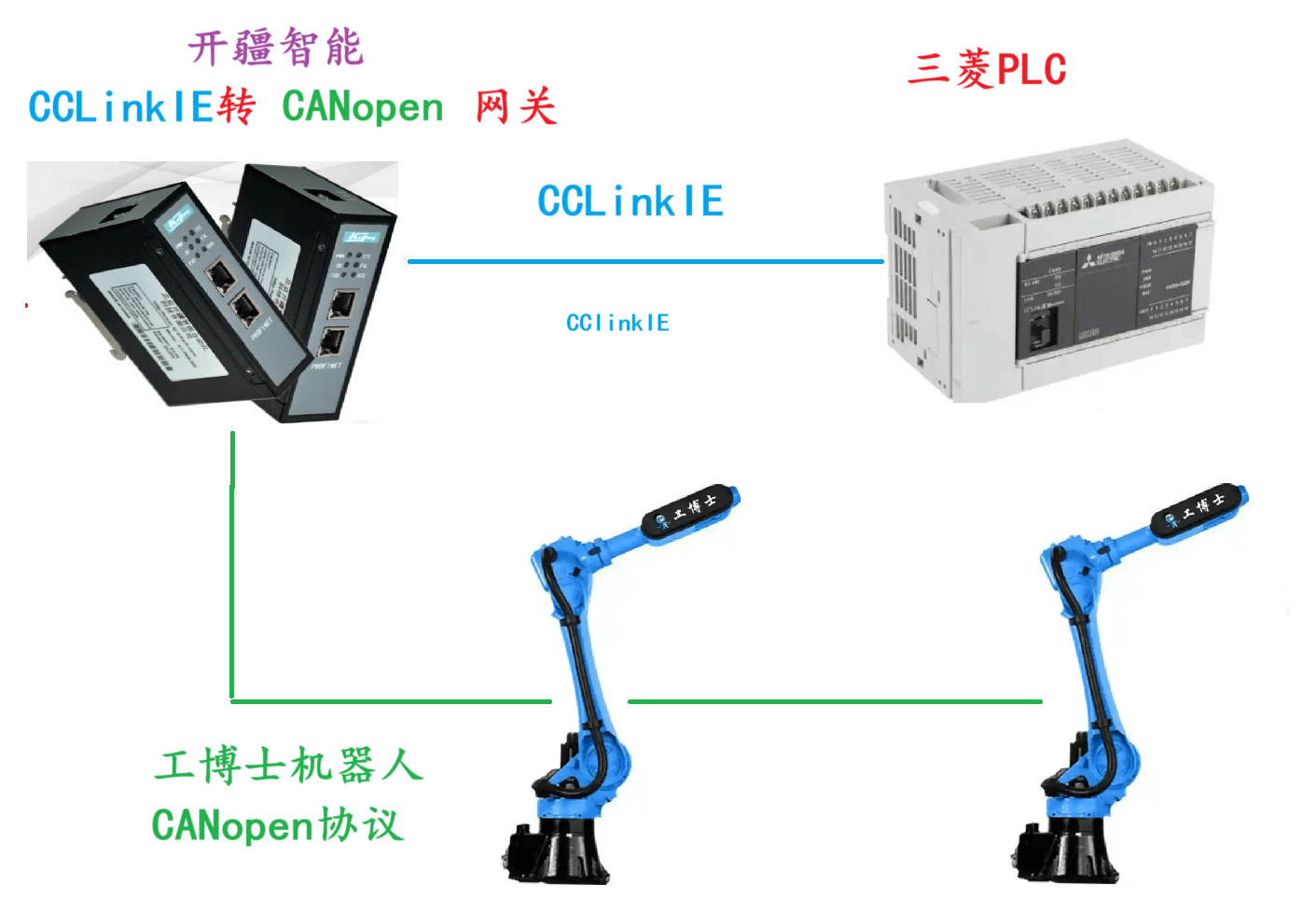
开疆智能CCLinkIE转CANopen网关连接GBS20机器人配置案例
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例

中微半导扫地机器人解决方案介绍




评论