 剖析激光雷达测距能力测试原理
剖析激光雷达测距能力测试原理

来源 | 光电资讯
激光雷达是一种通过发射激光束来检测目标位置,在进行各种处理后获得目标信息的雷达装置。激光雷达系统所采用的技术手段是光电探测技术,它是一种主动探测技术,能够准确、快速地获取目标的三维信息,并且具有良好的指向性,抗干扰性强,测距精度高。
直接表现激光雷达系统测距性能的是其中系统级指标,测距能力反映在指标上表现为max测程与测距精度。保证系统的发射机指标与接收机指标为保证测距系统的性能提供了基础,探测概率与虚警率反映了测距系统的探测能力。
max测程由国家标准 GJB2241A-2008《脉冲激光测距仪性能试验方法》定义,是脉冲激光测距仪在规定的环境和准测率等条件下,对规定目标测距时能测到的max远距离。
max测程反映了脉冲激光雷达理论上的max测量范围,是激光雷达测距系统的重要性能指标。由国家标准中的定义可知,max测程与测试环境密切相关。
脉冲激光测距仪出射的激光脉冲在大气中传输,由于大气对光具有散射、吸收、折射等作用,激光脉冲能量在传输过程中受到衰减,影响激光雷达接收系统接收到的回波脉冲的功率。
传输距离越远,衰减越严重,接收的激光回波功率越弱,直到接收系统接收不到回波信号,无法获得测程。因此max测程与回波功率有关。
激光回波功率与激光雷达作用距离有关,设大气单程总透过率为 ;R为激光雷达系统与目标表面间的距离即测程;
;R为激光雷达系统与目标表面间的距离即测程; 为激光雷达系统发射光学系统的光透过率;
为激光雷达系统发射光学系统的光透过率; 为激光雷达系统接收光学系统的光透过率;
为激光雷达系统接收光学系统的光透过率; 为接收机对目标表面反射回波的有效接收面积;
为接收机对目标表面反射回波的有效接收面积; 为目标的反射率;
为目标的反射率; 为激光雷达系统的发射功率,
为激光雷达系统的发射功率, 为激光发射光束的发散角,需要确保接收视场角在激光发散角内,以确保接收系统能够接收回波信号。
为激光发射光束的发散角,需要确保接收视场角在激光发散角内,以确保接收系统能够接收回波信号。
激光回波功率 与测程R之间的关系式为:
与测程R之间的关系式为:
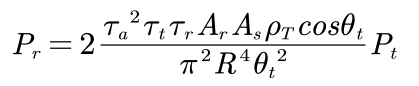
由上式可得,当测程在不断增加时,接收系统接收的激光回波功率在减小,直至无法探测到回波,此时的回波功率是激光雷达系统探测能力的临界点,
称为激光雷达系统的min可探测功率,对应测程即为max测程。当激光雷达系统确定后,发射系统的激光器也随着确定,其发射脉冲的功率是被标定的。
测距精度在国家标准 GJB2241A-2008 中也有定义,为脉冲激光测距仪进行测距时能够达到的min分辨距离。
脉冲激光雷达测距是利用激光主回波之间的飞行时间,利用下面的公式测量出激光传输距离的。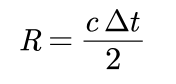 R表示待测距离,C表示光速,
R表示待测距离,C表示光速, 表示光脉冲在测线上往返传输所需要的时间,即认为这段时间内激光传输了两倍距离值。
表示光脉冲在测线上往返传输所需要的时间,即认为这段时间内激光传输了两倍距离值。
在同一测距条件下,激光脉冲的不稳定性会引起主波取样时刻与回波触发点时间变化,从而带来测距误差,测距精度就是通常意义上的测距误差。脉冲激光雷达系统的测距精度与测距信号的信噪比相关,具体表现为信噪比越高,测距精度也就越高。
对于一具确定的激光雷达系统而言,其测距能力是确定的,测距精度的误差就可以采取测试标校的方案予以修正,为了测试并标定激光雷达系统的测距精度,需要使用不同的逻辑组合进行多次测量,用实际测试距离值与仿真距离值比较,解算测距精度。
具体用公式表示如下:
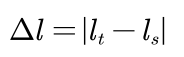
在上面的这个公式中, 为仿真距离值,
为仿真距离值, 为实际测试距离值。在使用光电-电光转换法的测试方法中,脉冲激光雷达发射系统发射的激光脉冲在测试系统中使用其走过的光程来模拟激光雷达系统与测得的目标地表之间的距离,通过光衰减、电延时等途径实现对真实目标反射回波的模拟。
为实际测试距离值。在使用光电-电光转换法的测试方法中,脉冲激光雷达发射系统发射的激光脉冲在测试系统中使用其走过的光程来模拟激光雷达系统与测得的目标地表之间的距离,通过光衰减、电延时等途径实现对真实目标反射回波的模拟。
通过对光程值的调整即可实现对测试距离的调整。激光雷达测距系统的精度通过多次测量之后,求取统计值得到。
仿真距离的精度应远高于激光雷达测距系统的测距精度,如此才能对需要测试标定的激光雷达系统的测距精度进行准确的评判。
如果被测激光雷达测距系统的测距精度为1m,仿真距离值的距离分辨率应具有 cm 级乃至 mm 级的距离分辨率,远高于 m 级。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系删除或修改!
编辑:jq
-
脉冲
+关注
关注
20文章
913浏览量
100227 -
仿真
+关注
关注
55文章
4575浏览量
138876 -
激光雷达
+关注
关注
984文章
4612浏览量
197468
原文标题:激光雷达测距能力测试原理
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
激光雷达+视觉组合方案

激光雷达在工业检测与测量场景的应用优势

为啥自动驾驶不使用1550纳米激光雷达?

万线激光雷达是依托什么技术实现的?

固态激光雷达参数以及避障视频
车载激光雷达温度监控:NTC芯片的核心应用
【科研动态】新一代集成光子FMCW激光雷达光源的设计框架与性能权衡

禾赛科技位列全球激光雷达行业专利第一

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

如何为自动驾驶汽车选择一款合适的激光雷达?

纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

800线!禾赛发布ETX激光雷达




评论