 无人机自主飞行编程赛赛规发布
无人机自主飞行编程赛赛规发布

目前,2021全国青少年无人机创新教育竞赛活动正积极开展中,竞赛设立无人机航空科普知识竞赛、无人机竞速赛、无人机足球赛、无人机任务赛、无人机自主飞行编程赛和无人机创意设计赛六个竞赛项目,创客火(Makerfire)将作为技术支持单位参与“无人机自主飞行编程赛”赛项的支持工作。
2021全国青少年无人机创新教育竞赛活动正式启航,快行动起来
无人机自主飞行编程赛细则
1、项目简介
无人机自主飞行编程赛以“探索太空”为主题,让学生利用图形化编程语言,使无人机自主飞行并完成各项规定任务的赛亊。
2、比赛场地
1.小学组场地如图五,竞赛场地为6m×6m的方形模拟“宇宙”,区域内有起飞点、A、B两个路径点和P区域,其中起飞点为我们生活的地球,A点为空间站,B点为陨石带,P为降落区。场地环境为室内正常白昼光。
2.中学组场地如图六,竞赛场地为4m×4m的模拟“月面”,区域内有飞船起降点、绿色祖冲之环形山点、红色坎贝尔环形山点、蓝色张衡环形山点。场地环境为室内正常白昼光。
3、技术要求
1.无人机类型:四轴可编程飞行器,动力为最多4个空心杯电机,轴距为150-230毫米,动力电池最大标称电压不大于7.4V(2S),飞行器重量不大于150克(带电池),禁止使用遥控器操纵完成比赛任务。
2.软件要求:图形化编程软件,具备飞行移动、灯光控制、巡线、人工智能应用等命令模块。
4、比赛时间
1.第一阶段现场编程和调试时间30分钟,程控飞行比赛时间为5分钟;
2.第二阶段现场编程修改时间为10分钟,程控飞行比赛时间为5分钟。
5、比赛方法
比赛共分为两个阶段,第一阶段为现场编程调试阶段,第二阶段为程控飞行阶段,每名选手有2次飞行机会。
(一)现场编程调试阶段
1.选手按组别进行该轮比赛,每组5名选手参赛;
2.编程调试阶段分为两次,第一次编程调试时间为30分钟,第二次编程修改时间为10分钟;
3.第一次编程调试时间内选手可在编程区及比赛地图上进行程序测试以及飞行器调试,时间结束后,所有选手退出比赛场地,等候第一次程控飞行;
4.第二次编程修改时间内选手可在编程区进行程序修改,时间结束后,选手停止编程,等候第二次程控飞行。
(二)程控飞行阶段
1.选手按顺序进入比赛场地进行月球探索的比赛,时间为5分钟;
2.每位选手有两次程控飞行机会;
3.裁判给出比赛结束信号时,选手必须立刻降落无人机,携带赛具退出比赛场地,等候第二次飞行机会;
4.裁判现场评分,选手签字确认后,携带赛具离开场地。
6、任务要求
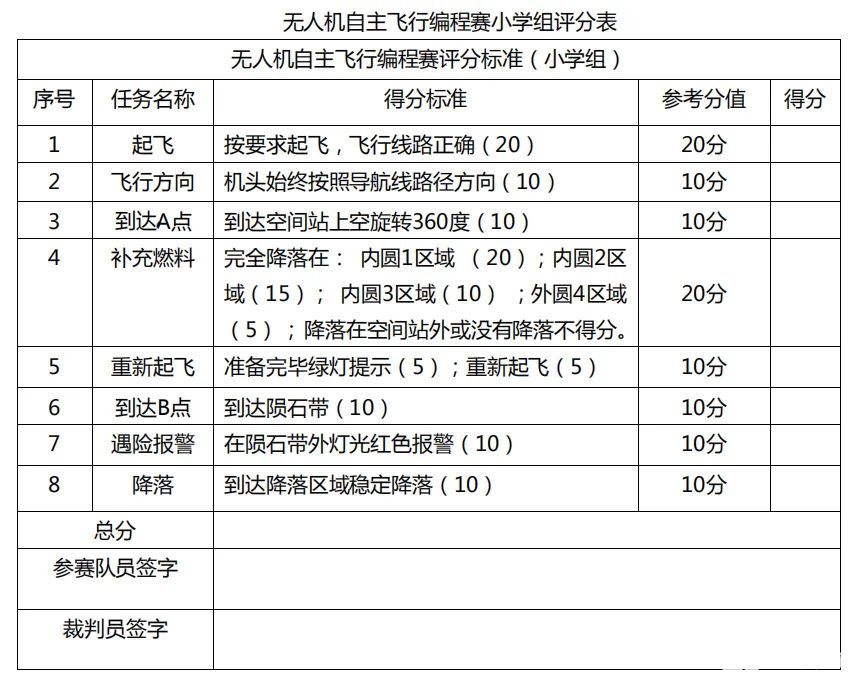
(一)小学组
1.比赛任务:
由地球起飞——巡规空间站A——空间站降落——到达陨石带B——到达降落区P降落。
2.任务说明:
(1)空间站:无人飞行器需要在空间站上空巡视360°后在空间站准确降落补充燃料,无异常后灯光提示绿色准备起飞,重新起飞后前往陨石带。
(2)陨石带:飞行器到达陨石带后无法通过,灯光红色进行报警,幵转向前往降落区。
(3)起飞:飞行器从地球起飞后进入比赛状态,进入比赛状态的含义是机器人完全起飞离地规为成功“起飞”,“起飞”任务不需要悬停,继续完成任务且5秒钟没有落地则规为成功“起飞”。
(4)飞行:飞行器需按照指定方向到达“空间站降落”及“陨石带前方”且“灯光红色报警”并“降落到回收站”。
(二)中学组
1.比赛任务:
无人飞行器需要在发射中心“发射”起飞,然后到达任务地点进行地理探索,最后到达回收中心降落。
2.任务说明:
(1)发射起飞
飞行器需要在起降点进行起飞升空,保持离地5秒,幵且灯光提示绿色表示发射成功,然后进行地理探索任务。
(2)飞行器地理探索
飞行器需要完成任务点的地理探索。
a.飞行器按照规划线路飞行至任务点A(祖冲之环形山)上空停留2秒,在编程界面回传A的中心月面坐标;
b.飞行器按照规划线路飞行至任务点B(张衡环形山)上空停留2秒,在编程界面回传环形山直径数据;
c.飞行器按照规划线路飞行至任务点C(坎贝尔环形山)上空停留2秒,在编程界面回传环飞行器航向数据;
(3)降落飞行器返回起降点稳定降落幵关闭所有灯光。
7、成绩评定
1.参赛选手按照飞行线路完成所有飞行任务及地理探索即为完成比赛,完成比赛任务的选手按有效时间得分排名。
2.两次飞行成绩取最优一次为最终比赛成绩。
3.凡是出现如下情况则任务失败:
(1)从智能飞行器起飞开始,5分钟内飞行器未能到达降落点。
(2)在5分钟内,飞行器未能探索所有地理关键点。
4.任务失败的选手,以飞行航线的完成度计算得分进行排名。
8、判罚
1.比赛飞行限时5分钟,所有参赛选手必须按指定顺序完成飞行任务,漏做不能重做(重做不计分)。
2.选手一旦确认上场比赛,不得以电量不足、机器损坏等理由中断比赛。比赛一旦中断,不再安排下一场。
3.出现以下情况,裁判员有权即刻宣布比赛结束,总分按照实际完成的项目对应得分及扣分规则进行计算。
(一)比赛实际用时超过规定的上限时间。
(二)飞行器编程自主完成任务赛中,选手主动用手接触或触碰飞行器。
(三)比赛中,飞行器跌落,无法复飞继续比赛。
(四)比赛中,选手用手动遥控控制飞行器的。
(五)比赛中,飞行器飞出比赛场地的边界。
(六)比赛中,飞行器超出飞行高度上限(飞行器的最大安全飞行高度2.5M)
9、其他
参照总则和一般规定,未尽亊项以竞赛裁判委员会现场商定判罚为准。

更多无人机STEAM教育资讯,可关注公众号“创客火无人机”。
-
无人机
+关注
关注
234文章
11145浏览量
193424
发布评论请先 登录
陀螺仪在无人机中的应用:无人机精准飞行的关键保障

无人机操控核心:智能飞行的技术引擎
德赛西威发布车规级低速无人车品牌
正方科技欧荷智能电池赋能无人机安全飞行
翼辉信息DUP产品如何助力无人机完成智能化飞行

使用高精度IMU对无人机系统有何提升?
MEMS陀螺仪如何成为无人机精准飞行的核心引擎?
石英晶振在无人机领域的应用

使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!

晶振化身空中交警,为无人机飞行保驾护航

《手把手教你做星闪无人机—KaihongOS星闪无人机开发实战》系列课程课件汇总
无人机自动巡检系统技术革新与应用前景
MOS 管在无人机电池中的关键应用

无人机飞行控制器的组成部件和工作原理

从姿态到飞行控制,IMU全方位守护无人机飞行






 工商网监
工商网监
评论