 剖析模糊控制的步进梁速度控制系统
剖析模糊控制的步进梁速度控制系统

0 引言
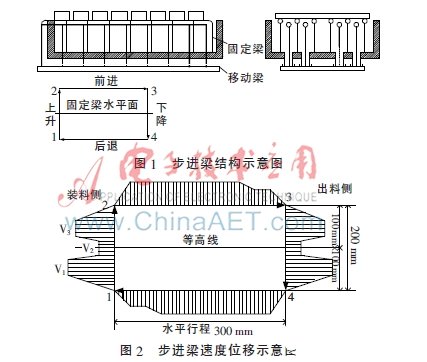
步进梁是步进式加热炉的核心设备,钢坯的移动是通过步进梁的静梁和动梁的相对运动来实现的,步进梁的动梁作上升、前进、下降、后退等动作将钢坯送入加热炉加热。步进梁的结构如图1所示。步进梁的速度给定须精确控制,以减少其运动惯性和冲击,减少对步进梁系统的损坏,在每个运动的起始阶段和终止阶段,步进梁分别作加速运动和减速运动。
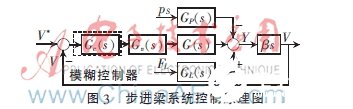
在上升和下降的中间阶段,由于步进梁接近钢坯,步进梁进行一次中间减速-匀速-加速运行过程,以减少负荷对步进梁的冲击,达到钢坯在炉内“轻托、轻放”的目的。步进梁速度位移示意图如图2所示。步进梁的动力是由电液比例方向阀和液压缸组成的液压系统提供,通过电液比例方向阀控制流量以驱动液压缸的移动来实现的。
在工程实践中,步进梁的控制多采用开环控制,控制效果差[1-3],控制精度并不能满足要求。鉴于本文的控制对象是一个典型的非线性、时变、强干扰系统,本文设计了一种基于规则校正的模糊PID控制器,该控制器可使系统有更快地响应且有一定的抗干扰能力。
1 阀控非对称液压缸系统建模
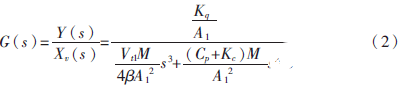
步进梁系统由电液比例方向阀、液压缸和步进梁组成。当液压缸活塞外伸时完成钢坯上升和前进动作;当液压缸活塞内缩时完成钢坯下降和后退动作。本文以步进梁上升动作为例来说明。步进梁系统控制原理图如图3所示。
电液比例方向阀阀芯位移Xv(s)与控制信号U(s)之间的传递函数为[2,4-5]:

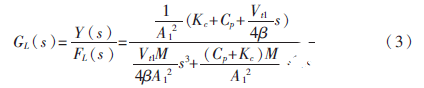
液压缸的活塞位移Y(s)与阀芯位移Xv(s)之间的传递函数为:
活塞位移Y(s)与负载FL(s)之间的传递函数为:
活塞位移Y(s)与油源压力Ps(s)之间的传递函数为:
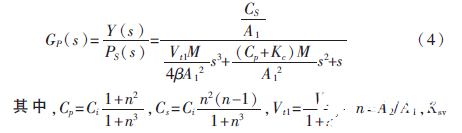
为电液比例阀的增益,Tsv为电液比例阀的时间常数,Kq为流量增益,A1为无杆腔的有效面积(m2),A2为有杆腔的有效面积(m2),Ci为液压缸内泄漏系数(m3/(s·Pa)),V1为液压缸进油腔的容积(m3),e为油液的有效体积弹性模量(包括油液、混入油液中的空气、连接管道及缸体的机械柔度的影响)(Pa),ps为油源压力(MPa),M为活塞及负载总质量(kg),Kc为流量-压力系数,xv为电液比例阀阀芯位移(m)。
当步进梁满负荷工作时钢坯重达450 t,为减经作用在液压缸活塞杆上的力,故采用双轮斜轨式步进机构,如图4所示。
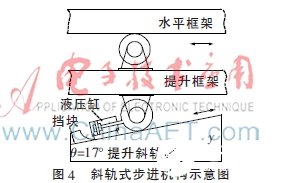
则可得液压缸的位移y(m)与钢坯的位移ys(m)满足如下关系式:

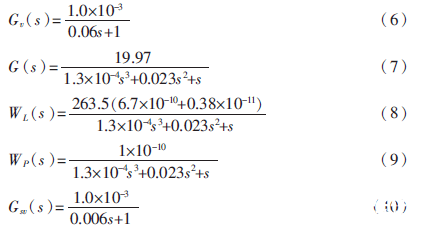
本文以山东某钢厂为研究对象,根据测得的相关参数[2],可得如下传递函数的表达式:
2 模糊PID控制器设计
自整定模糊PID控制器的结构如图5所示。
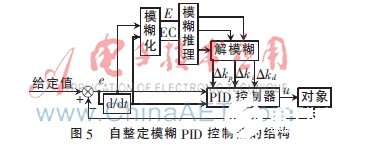
它以偏差e和偏差变化率ec作为输入,以PID控制器的参数kp、ki、kd作为输出。它利用模糊理论对PID参数进行校正,校正算法如下:kp=kp′+
kp,ki=ki′+
ki,kd=kd′+
kd,其中kp′、ki′、kd′是预先调定的量,
kp、
ki、
kd为模糊控制器的输出,kp、ki、kd为PID控制器的输出[6]。
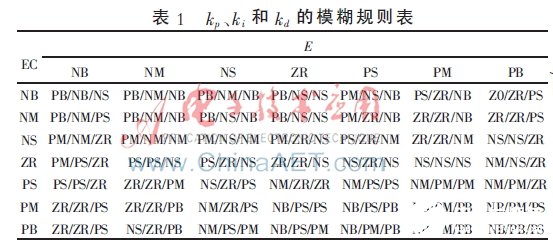
定义偏差e、偏差变化率ec及kp、ki、kd的论域均为 {-6,6};其模糊子集{PB,PM,PS,ZR,NS,NM,NB},子集中的元素分别为负大、负中、负小、零、正小、正中、正大。为了计算机处理和实现上的方便,输入偏差、输入变化率|EC|和输出的隶属度函数均采用线性函数[7]。
该模糊控制器的控制规则采用“IF A AND THAN C”的形式建立。根据自整定模糊PID控制的设计思想可得kp、ki、kd的模糊控制规则如表1所示[8]。
3 系统仿真分析
为验证所设计步进梁液压系统的性能,采用MATLAB/Simulink中的软件包和模糊逻辑工具箱FIS来模拟该控制系统的仿真环境。其中模糊控制器的参数ke= 0.2、kec=1、
kp=1、
ki=4.5、
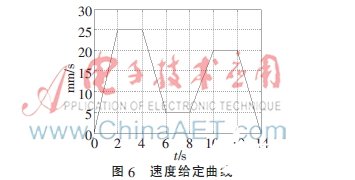
kd=0.2;PID的初值为kp′=16、ki′=30、kd′=0.5。速度给定曲线如图6所示。
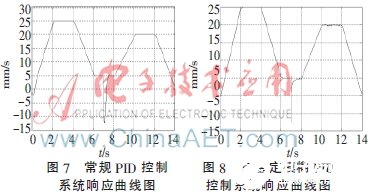
常规PID控制系统响应曲线如图7所示,在第7秒时由于托起重达450 t的钢坯,速度有较大的下降,故考虑采用模糊自整定PID控制。自整定模糊PID控制系统响应如图8所示,由图可以看出速度下降明显减少且响应明显加快。
4 结论
步进梁是步进式加热炉中的重要设备,步进梁的速度须精确控制,当步进梁上升托起钢坯时由于钢坯的大重量使得其速度会大幅度下降,考虑到步进梁系统是非线性和时变系统,故本文分别用PID控制器和自整定模糊PID控制器对步进梁系统进行对比研究。仿真结果表明,与传统PID控制器相比,模糊PID控制器具有响应速度快、抗干扰能力强的特点,基本上达到了对步进梁系统快速、平稳控制的要求,很好地缓解了设备冲击,另外也为该控制方法在其他场合上的应用提供了参考。
参考文献
[1] 杨征瑞,花克勤,徐轶.电液比例与伺服控制[M].北京:治金工业出版社,2009.
[2] 邹阳举.步进式加热炉电液控制系统分析与建模[D].合肥:合肥工业大学,2013.
[3] 马晓宏,陈冰冰,甘学辉,等.电液比例阀控液压缸位置控制系统的建模与仿真研究[J].机械设计与制造,2008(4):43-45.
[4] 强宝民,刘保杰.电液比例阀控液压缸系统建模与仿真[J].起重运输机械,2011(11):35-39.
[5] Guo Rui, Zhao jingyi. Research of electro-hydraulic control system design and energy saving characteristic in the new drawbead test bed[R]. Beijing: Fluid Power and Mechatronics(FPM), 2011, 2011 International Conference of Digital Object Ident-ifier, 2011:301-305.
[6] 周恩涛,廖生行,牟丹.电液比例阀控系统模糊-PID控制的研究[J].机床与液压,2003(6):225-227.
[7] 颜香梅,王辉,李中启,等.基于模糊逻辑的无线电能传输输出端稳压控制[J].电子技术应用,2014,40(12):72-75.
[8] 王恩亮.模糊PID控制的中频电炉温控系统设计[J].微型机与应用,2014,33(24):75-77.
编辑:jq
-
液压缸
+关注
关注
0文章
23浏览量
9526 -
模糊PID控制
+关注
关注
0文章
14浏览量
7693 -
速度控制
+关注
关注
0文章
38浏览量
8286
发布评论请先 登录
步进电机的位置控制与速度控制




评论