 详解基于深度学习的伪装目标检测
详解基于深度学习的伪装目标检测

最后是O2OGM模块,将Conv6-3提取的显著性目标特征信息与Conv2-2提取的边缘特征结合后的特征分别与Conv3-3、Conv4-3、Conv5-3、Conv6-3每层提取的显著性目标特征进行融合,即图中FF模块的操作。FF操作很简单,就是将高层特征上采样然后进行拼接的操作,就可以达到融合的效果。
PFANet的结构相对简单,采用VGG网络作为特征提取网络,然后将前两层特征称为低层特征,后三层特征称为高层特征,对他们采用了不同的方式进行特征增强,以增强检测效果。
首先是对于高层特征,先是采用了一个CPFE来增大感受野,然后再接一个通道注意力模块,即完成了对高层特征的特征增强(这里的这个CPFE,其实就是ASPP)。
然后再对经过了CPFE后的高层特征使用通道注意力(CA)。
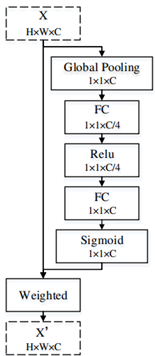
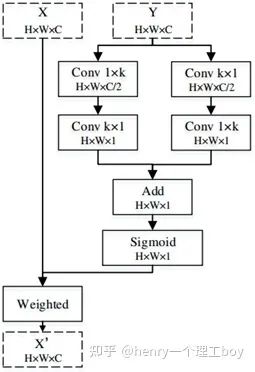
以上即是高层特征的增强方法,而对于低层特征,处理得则更为简单,只需要使用空间注意力模块(SA),即可完成。
整个PFANet的网络结构很清晰,如下图所示。
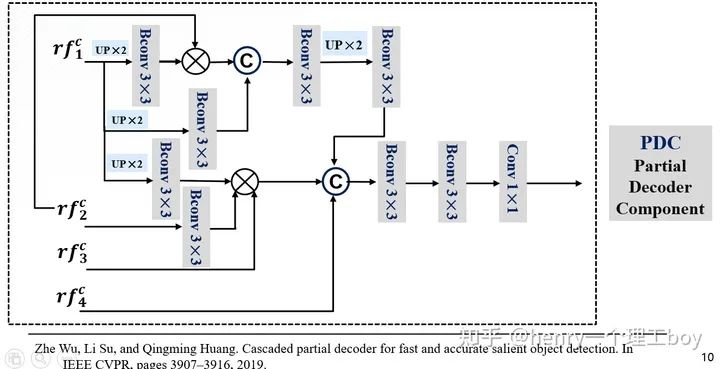
介绍完EGNet和PFANet两种方法以后,就剩下SINet了。SINet的思路来自于19年的一篇CVPR的文章《.Cascaded partial decoder for fast and accurate salient object detection》。这篇文章里提出了CPD的这样一个结构,具体的可以取搜索一下这篇论文,详细了解一下。
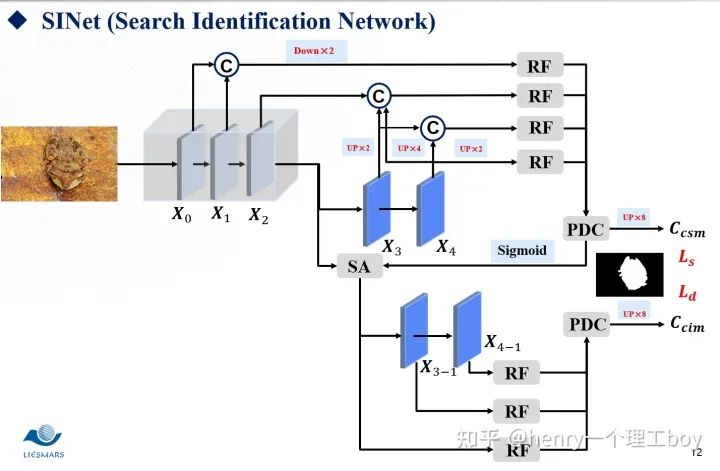
接下来我将介绍一个用于伪装目标检测的网络SINet。假设你是一头饥肠辘辘的雄狮,此刻你扫视着周围,视线突然里出现了两匹斑马,他们就是你今天的猎物,美食。确定好了目标之后,那么就开始你的猎杀时刻。所以整个过程是你先扫视周围,我们称之为搜索,然后,就是确认目标,开始猎杀,我们称之为确认。我们的SINet就是这样的一个结构,他分为搜索和确认两个模块,前者用于搜索伪装目标,后者用于精确定位去检测他。
我们现在就具体来看看我们的SINet到底是怎么一回事。首先,我们都知道低层特征有着较多的空间细节,而我们的高层特征,却有着较多的语义信息。所以低层的特征我们可以用来构建目标区域,而高层特征我们则可以用来进行目标定位。我们将这样一张图片,经过一个ResNet的特征提取器。按照我们刚才的说法,于是我们将前两层称为低层特征,最后两层称之为高层特征,而第三层我们称之为中层特征。那么有了这样的五层特征图,东西已经给我们了?我们该怎么去利用好这些东西呢?
首先是我们的搜索模块,通过特征提取,我们得到了这么一些特征,我们希望能够从这些特征中搜索到我们想要的东西。那我们想要的是什么呢?自然就是我们的伪装线索了。所以我们需要对我们的特征们做一些增强的处理,来帮助我们完成搜索的这样一个任务。而我们用到的方法就是RF。我们来看一下具体是怎么样实现的。首先我们把整个模块分为5个分支,这五个分支都进行了1×1的卷积降维,我们都知道,空洞卷积的提出,其目的就是为了增大感受野,所以我们对第一个分支进行空洞数为3的空洞卷积,对第二个分支进行空洞数为5的空洞卷积,对第3个分支进行空洞数为7的空洞卷积,然后将前四个分支的特征图拼接起来,这时候,我们再采用一个1×1卷积降维的操作,与第五个分支进行相加的操作,最后输出增强后的特征图。
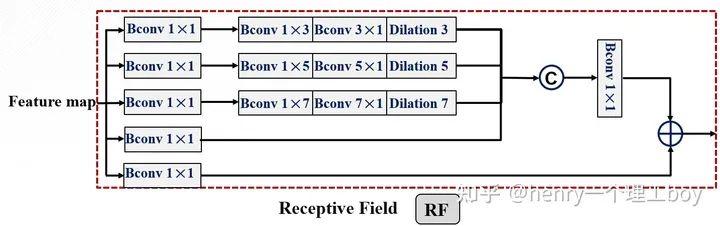
这个RF的结构来自于ECCV2018的一篇论文《 Receptive field block net for accurate and fast object detection》,其作用就是帮助我们获得足够的感受野。
我们用RF对感受野增大来进行搜索,那么搜索过后,我们得到了增强后的候选特征。我们要从候选特征得到我们最后要的伪装目标的检测结果,这里我们用到的方法是PDC模块(即是部分解码组件)。
具体操作是这样的,所以接下来就应该是对它们进行处理了逐元素相乘方式来减少相邻特征之间的差距。我们把RF增强后的特征图作为输入,输入到网络里面。首先对低层的进行一个上采样,然后进行3×3的卷积操作(这里面包含了卷积层,BN层还有Relu层),然后与更高一层的特征图进行乘法的这样一个操作,我们为什么使用逐元素相乘呢?因为逐元素相乘方式能减少相邻特征之间的差距。然后我们再与输入的低层特征进行拼接。
我们前面提到了,我们利用增强后的特征通过PDC得到了我们想要得到的检测结果,但这样的一个结果足够精细吗?其实,这样得到的检测结果是比较粗略的。这是为什么呢?这是因为我们的特征之间并不是有和伪装检测不相关的特征?对于这样的多余的特征,我们要消灭掉。我们将前面得到的检测图称之为,而我们要得到精细的结果图,就得使用我们的注意力机制了。这里我们引入了搜索注意力,具体是怎么实现的呢?大家想一想我们前面把特征分成了低层特征、高层特征还有中层特征。我们平时一般都叫低层特征和高层特征,很少有提到中层特征的。其实我们这里这样叫,是有打算的,我们认为中层特征他既不像低层特征那么浅显,也不像高层特征那样抽象,所以我们对他进行一个卷积操作(但是我们的卷积核用的是高斯核函数方差取32,核的尺寸我们取为4,我们学过数字图像处理,都知道这样的一个操作能起到一个滤波的作用,我们的不相关特征能被过滤掉)但是有同学就会问了,那你这样一过滤,有用的特征不也过滤掉了吗?基于这样的考虑,我们把过滤后的特征图与刚才的这个再来做一个函数,什么函数呢?就是一个最大化函数,这样我们不就能来突出伪装图初始的伪装区域了吗?
SINet整体的框架如图所示:
讲了这么多,我们最后来看看实验的效果,通过对这三篇文章的复现,我得到了下面的这样一些结果。
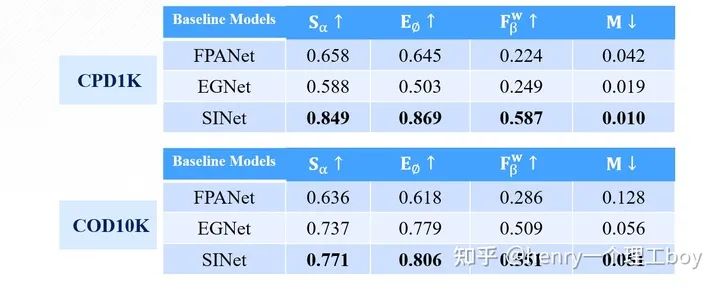
可以看出,在精度指标的评价方面,SINet相比于其他两种方法都有很大提升,而PFANet模型结构虽然很简单,但他的效果也是最差的。
下面我们再看看可视化的效果:
责任编辑:lq
-
模块
+关注
关注
7文章
2849浏览量
53435 -
检测
+关注
关注
5文章
4930浏览量
94286 -
深度学习
+关注
关注
73文章
5607浏览量
124620
原文标题:详解基于深度学习的伪装目标检测
文章出处:【微信号:cas-ciomp,微信公众号:中科院长春光机所】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人工智能-Python深度学习进阶与应用技术:工程师高培解读


【智能检测】基于AI深度学习与飞拍技术的影像测量系统:实现高效精准的全自动光学检测与智能制造数据闭环
穿孔机顶头检测仪 机器视觉深度学习
【团购】独家全套珍藏!龙哥LabVIEW视觉深度学习实战课(11大系列课程,共5000+分钟)
【团购】独家全套珍藏!龙哥LabVIEW视觉深度学习实战课程(11大系列课程,共5000+分钟)
电压放大器在全导波场图像目标识别的损伤检测实验的应用

如何深度学习机器视觉的应用场景
广和通发布端侧目标检测模型FiboDet
如何在机器视觉中部署深度学习神经网络
【机器视觉】睿擎平台支持NCNN AI 推理框架,轻松实现实时目标检测( 睿擎线下 Workshop 报名已开启)|产品动
提高IT运维效率,深度解读京东云AIOps落地实践(异常检测篇)



评论