 沈阳自动化所微纳米课题组在微型机器人研究领域取得新突破
沈阳自动化所微纳米课题组在微型机器人研究领域取得新突破

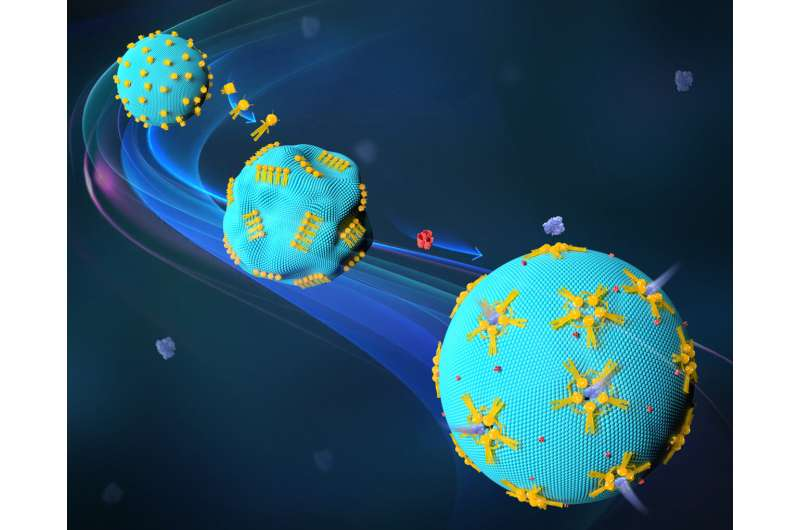
基于气泡微型机器人的结构一体化装配及驱动。沈阳自动化所供图
中新网沈阳1月27日电 (王景巍)中国科学院沈阳自动化研究所(以下简称沈阳自动化所)27日发布消息称,该所微纳米课题组在微型机器人研究领域取得新突破,研发的气泡微型机器人实现了对多个微结构的一体化装配及驱动研究结果。
一直以来,机器人被广泛用于汽车制造、飞机喷漆等工业自动化领域,但用于生物医学的微结构部件装配尚未实现自动化。随着制造业的微型化,目前加工的微结构只有几十微米或几百微米长,如何对这么小的结构进行装配为该领域面临的一项挑战。
经过研究发现,微型机器人是可能的解决方案。在之前的研究中,科学家们利用激光或超声制造微气泡对微结构进行二维或三维组装,但却不能将这些松散独立的结构连接起来形成一个整体。
沈阳自动化所微纳米课题组的科研人员希望在他们已开展的气泡微型机器人对微结构二维及三维操作(包括二维移动、旋转和三维翻转、滚动等)基础上,研制出能够将多个独立结构装配成一体化结构并控制其运动的气泡微型机器人。
据了解,科研人员通过巧妙设计微结构具有卡扣连接结构,气泡微型机器人可以将多个独立微结构抬起、翻转并装配成不会散开的一体化结构,例如:由多个独立微结构装配成完整齿轮结构、蛇形结构、小车结构等。气泡机器人也可作为驱动器驱动这些结构运动,包括蛇形结构弯曲、齿轮旋转、小车运动等。该方法为微结构的操作及一体化装配,体外生物组织构建提供了新的解决方案。
该研究得到了中国国家自然科学基金、中国科技部重点研发计划、中国科学院国际合作重点项目和交叉创新团队等项目的支持。研究成功发表在ACS Applied Materials & Interfaces(美国化学学会《应用材料与界面》期刊),并入选美国化学学会亮点成果。
责任编辑:xj
原文标题:沈阳自动化所研发气泡微型机器人实现微小零件装配与操控
文章出处:【微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
213文章
31391浏览量
223547 -
自动化
+关注
关注
31文章
5982浏览量
90621 -
微型机器人
+关注
关注
0文章
112浏览量
20229
原文标题:沈阳自动化所研发气泡微型机器人实现微小零件装配与操控
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
起源于诺贝尔物理学奖得主,纳米机器人再突破!
3.12日科士威传动即将亮相合肥自动化暨机器人展!

智能复合机器人解决方案:优化自动化搬运与提高物流效率
探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
解锁智能制造新潜能:复合机器人“开箱即用”驱动检测自动化升级

智慧科研新纪元:善思创兴引领AI与自动化变革
富唯智能复合机器人力控技术:重新定义精准自动化
工业机器人的特点
NVIDIA展示机器人领域的研究成果
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

《人形机器人智能化指数及测试评价研究》课题启动会召开
机器人和自动化的未来(2)




评论