 能勾勒出任何图像轮廓的四轴机械臂设计方案
能勾勒出任何图像轮廓的四轴机械臂设计方案

Roboartist是一个四轴的机械臂,可以使用Edgestract(我们定制的边缘检测算法),使用钢笔/铅笔在A3纸上勾勒出任何图像的轮廓。该项目依靠核心引擎从上传的图像中提取边缘进行处理。Arduino Mega通过USB /蓝牙端口使用从MATLAB发送的信息来控制伺服器。
硬件
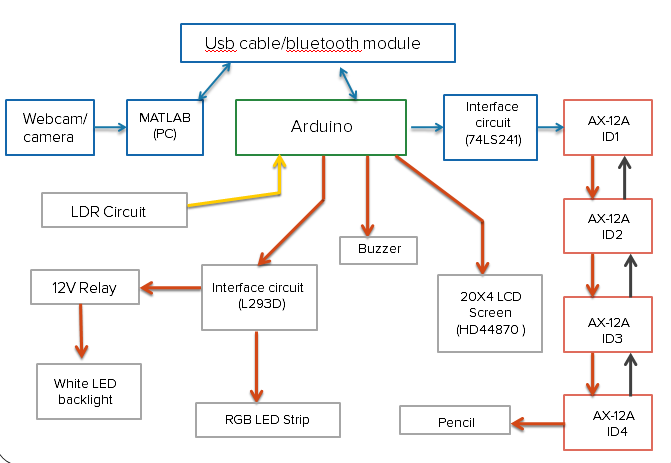
硬件的基本布局如上所述。图像采集是通过网络摄像头或照相机实现的。我们还允许扫描现有的JPEG。尽管并非必须要使用RGB LED灯条和LCD屏幕,但我们只是出于娱乐目的而将其投入使用。真正改善产品设计的是由LED灯条构成的白色LED背光灯。光线透过纸张扩散,为Roboartist的演奏提供了良好的光环。
软件
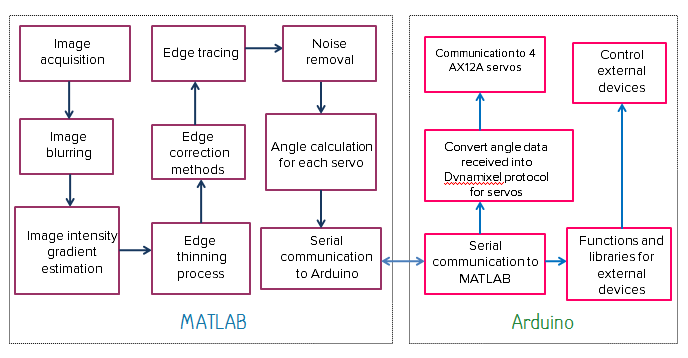
这是软件的结构。基本思想是让MATLAB承担所有繁重的工作,而让Arduino专注于挥舞铅笔。该程序要求用户控制一些参数以消除噪声并获得良好的边缘输出。完成后,程序将与Arduino通信。
快速浏览涉及的图像处理阶段:
每个切片都来自一系列连续的DIP阶段。最初我们一直使用Canny边缘检测算法,但是现在我们已经构建并切换到Edgestract(一种更优化的绘图算法)。我们一直在对各种类型的图像运行该算法并记录结果。
责任编辑:xj
原文标题:能勾勒出任何图像轮廓的四轴机械臂
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械臂
+关注
关注
14文章
606浏览量
26227 -
四轴
+关注
关注
0文章
40浏览量
13875
原文标题:能勾勒出任何图像轮廓的四轴机械臂
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
HT for Web 赋能工业产线机械臂数字孪生———流程工业实践方案
基于图扑软件自研 HT for Web 引擎,我们完成了纯原生的工业产线机械臂数字孪生系统开发,全程未使用任何第三方插件,充分发挥了 HT for Web 引擎在工业数字孪生领域的原生技术优势。该系



机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
。本文采用“眼在手上”配置(相机固定在机械臂末端),需同时考虑固定偏移和关节运动。
自研逆运动学 控制6轴机械臂精准抓取(不依赖MoveIt
发表于 04-10 21:23
告别围栏时代!激光雷达让机械臂产线“智能守卫”效率飙升
某知名制药企业的无菌制剂灌装生产线上,并排部署了8台高精度灌装机械臂,在A级洁净区(ISO5级)环境下工作,这些机械臂需要寻求安全防护方案来

四轴无人机是如何工作的?
四轴飞行器、无人机——无论怎么称呼它们,这些小玩意儿都既迷人又好玩!对于喜欢DIY的人来说,组装一架四轴飞行器绝对是一个很棒的项目。但四

3C 电子 / 汽车 / 物流与新零售:协作机械臂的三大行业落地范式
有限公司始终站在企业视角,以先进的协作机械臂技术与全方位的自动化解决方案,助力企业破解生产痛点、提升竞争优势。

传统测试设备的局限与协作机械臂的破局
在协作式测试设备的研发与落地中,北京沃华慧通测控技术有限公司凭借深厚的测控技术积累,成为行业核心赋能者。作为专注于智能测控设备研发的高新技术企业,北京沃华慧通测控技术有限公司深度把握协作机械臂的技术特性,构建了 “机械

机器人机械臂效率提升的革命性解决方案:上海永铭电容器实践
在现代自动化与精密制造中,机器人机械臂(人形/工业)的稳定性与效率至关重要。电容器作为电路中的基本组件,对机器人机械臂的性能发挥着至关重要的作用。01机器人

协作机械臂产品介绍
电子发烧友们、工业自动化从业者、科研工作者们注意啦!今天给大家重磅介绍一款在机械臂领域表现极为亮眼的产品——协作机械臂,它正以卓越性能重塑行业格局!☎(壹捌伍 柒零零玖 壹壹捌陆)卓越
发表于 08-07 17:20
•0次下载
极海G32R501工业六轴机械臂参考方案释放工业4.0产业价值
挥着重要作用,是现代工业自动化和智能化生产的核心工具。据Grand View Research数据分析,2024年全球工业机器人市场规模约为340亿美元,预计2025年至2030年将以9.9%的复合年增长率持续增长,展现出巨大的市场潜力。 极海工业六轴机械
发表于 06-23 13:52
•2027次阅读

GZCOM-NET:为机械臂测试带来高效无线解决方案!
在智慧工厂中,机械臂的性能和安全性需通过静态与动态测试来保障。批量化测试时,后台需实时显示数据曲线和异常数据。GZCOM-NET凭借高效稳定的无线传输,为机械臂测试提供可靠

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形机器人、仿生机器人等多种形态。拳头产品myCobot系列以“全球最轻的六轴机械臂”闻名,累计销量超数万台,覆盖

通过什么方法能获得关于Ethercat方面的设计方案和设计资料
您好通过什么方法能获得关于Ethercat方面的设计方案和设计资料,我们主要关于主站,从站IO和运动控制方面的资料,谢谢!!
发表于 05-28 10:07



评论