 中科院研发微纳生物机器人,实现主动靶向癌症治疗
中科院研发微纳生物机器人,实现主动靶向癌症治疗

近日,中国科学院深圳先进技术研究院蔡林涛团队在微纳生物机器人治疗肿瘤研究中取得突破性进展,他设计了一种由顺序性磁驱动和光触发的 AI 微纳机器人,并将其用于实现主动靶向的癌症治疗。
研究表明,该 AI 微纳生物机器人通过内乏氧驱动和外磁场驱动实现自主靶向游动、以及磁 / 光序贯操控,在小鼠体内实现了磁控导航、肿瘤穿透和光热消融。
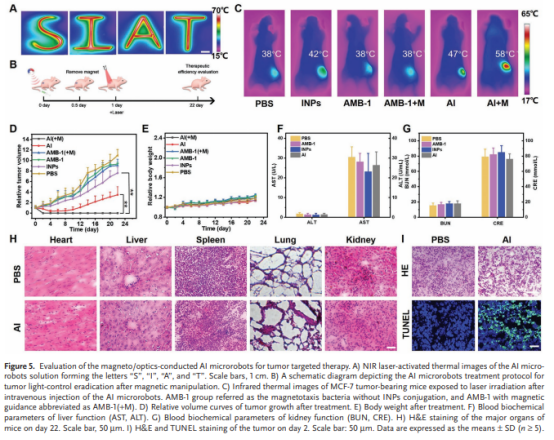
图 | 蔡林涛发表关于 AI 微纳生物机器人植入体内相关研究
如果该项技术应用于人体,可以简单的理解为,在肿瘤患者体内植入 AI 微纳生物机器人,它可以自动游向肿瘤病灶部位,并将肿瘤消除,随后机器人本身可以被人体吸收,不会对健康造成任何损害。
吞下一个微纳生物机器人,它可以像医生一样在人体内 “手术” 切割病灶,这样的想法在医学界被称为 “吞下外科医生” 幻想。是由诺贝尔物理学家查德・费曼在 1959 年率先提出的,他曾预言 “人类未来可以吞下外科医生”。
如今,随着医学技术的飞速发展,人造微纳机器人的研究得以深入,脑损伤、恶性肿瘤等医学难题在微纳机器人领域看到了希望,查德・费曼的美好幻想似乎真的要实现了。
采用可降解微生物,把 AI 微纳机器人打造成钢铁侠
2019 世界机器人大会上,中国科学院沈阳自动化研究所研究员刘连庆提出,微纳机器人的应用瓶颈是其材料的生物兼容性。
蔡林涛团队在既往研究之上,选用海洋来源的趋磁细菌(AMB-1)作为模板,利用迈克尔加成反应将纳米吲哚菁绿(Indocyanine green nanoparticles)光敏剂负载到细菌表面,构建了 AI 微纳生物机器人(AI microrobot),再通过磁场操控和光学触发,实现肿瘤穿透和光热消融。
这里的 “AI” 指的是趋磁细菌(AMB-1)和吲哚菁绿纳米颗粒(Indocyanine green nanoparticles),而不是传统意义上的人工智能。
趋磁螺菌作为可降解的一种微生物,安全性很高。同时,不同于目前的微纳机器人通过血液循环的被动靶向治疗,趋磁螺菌可以自主 “游向” 肿瘤部位。
据蔡林涛介绍,趋磁螺菌主要通过两种方式完成主动靶向游动,一方面是受内部乏氧驱动效应,对缺氧的肿瘤部分有靶向;另一方面,受外部磁场调控,会自主流向肿瘤部位。
这个过程,就是为微纳机器人装上一个能源动力系统,提升微纳机器人到达病灶部位的精准度。
以趋磁螺菌为基础,附加上由吲哚菁绿纳米颗粒构成的光敏剂,用激光刺激光敏剂产生局部高温,从而达到消除肿瘤细胞的目的。
为了确保过程中不会对正常组织细胞造成影响,蔡林涛将温度控制在 50-52℃间,这个温度区间肿瘤细胞的耐受能力差,几分钟就会被杀死。
吲哚菁绿还可作为荧光显像剂,又结合细菌内磁小体的核磁共振成像完成体内的双重可视化追踪。
蔡林涛认为,整个研究最创新也是最核心的地方在于,在原来被动体系的基础上加入了一个能源体系,类似于把微纳机器人变成钢铁侠,可以在病患体内自主 “打怪”。
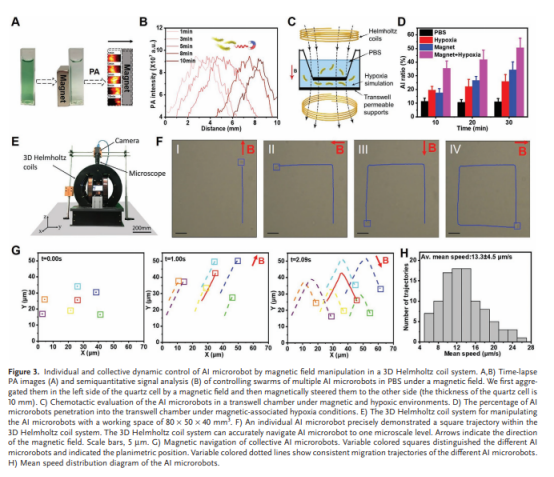
图 | AI 微纳生物机器人单一 / 群体控制
加载能源的 AI 微纳机器人可穿透多种复杂生物屏障
目前,使用微纳机器人技术在生物医疗领域的尝试有很多,但如何克服复杂的生物内部结构是所有研究绕不开的难题。
以穿透屏障为例,蔡林涛针对三种不同的情况进行了详细的解释。
物理屏障:在实际临床肿瘤治疗中,肿瘤周围存在着 “基质屏障”,这种像外壳一样的细胞层具有高致密性,导致常规纳米机器人很难穿透进肿瘤内部。
蔡林涛表示,通过磁场驱动的 AI 微纳机器人能够有效地穿透屏障,过程中也不会导致微纳机器人变形。
生物屏障:在常规药物治疗中,药物是通过分子蛋白通道进去到病灶区域,但恶性肿瘤如脑胶质瘤这种特殊情况具有对药物的排斥性,这样就会导致药物无法输送。AI 微纳机器人通过外部磁场的拉动同样能够解决这样的问题。同时,AI 微纳机器人可以针对复杂环境画出路径,运动幅度 360° 不受限。
图 | AI 微纳生物机器人精准操控路径
梯度屏障:常规药物治疗还受循环系统影响,无法抵达循环较差的病灶区。AI 微纳机器人可以通过精确定位,完成对药物的输送。
蔡林涛表示,“AI 微纳机器人不是靠渗透、扩散进去病灶区,而是通过主动靶向的方式。有了外在磁场能源的加持,AI 微纳机器人可以突破很多生理屏障,到任何想要去的地方。”
增强微纳机器人生物内驱动,是下一代药递送技术的核心
蔡林涛认为,现在微纳机器人以机械力或电力驱动为主,未来微纳机器人的驱动应该是生物化的,这是下一代药递送技术的核心。
生物内驱动的微纳机器人能成为未来的关键取决于以下三点:
生物安全性高。生物本身融合属性能让其在完成工作后自动降解,不会在体内产生和残留有害物质、以及造成额外副作用。
定点投递精准度。根据生物本身的特殊性,可以让其自主游向乏氧区域,进而保障微纳机器人能够精准达到病灶,不会到达身体不需要治疗的区域。
驱动控制更高效。点对点激光触发局部高温非常考验精细化操作,如果热量弥散会导致伤害身体健康细胞,定点投递精准的同时,还可保证后期激光进行高效的定点释放。
目前,蔡林涛团队已经开始研究通过生物内驱动增强微纳生物机器人的功效。除趋磁细菌外,团队也在尝试用酵母菌、人体益生菌等物质,同时通过酶催化体系和化学催化体系,完成微纳机器人的内驱动,让药物颗粒穿过复杂的人体屏障直达病灶。
从人体自身寻找微纳机器人的内生能源在安全性上更进一步,通过酶催化形成一个气体模式,这个气体就像推进器一样,带着微纳机器人去制定区域。
“生物内驱动的微纳机器人就如同一个带有 GPS 导航的深水炸弹,只会去指定的地方爆炸,不会对其他地方造成损害。” 蔡林涛说。
他坦言,通过生物内驱动的 AI 微纳机器人有望在未来 3-5 年内完成临床试验,随后会被推广使用在肿瘤治疗当中。
纳米医疗的 “魔幻” 未来
与 “吞下外科医生” 的幻想相同,蔡林涛对微纳机器人在医疗上的应用也有着 “硬核” 幻想。
蔡林涛直言,研究纳米医疗的终极目标是要打造一个 “健康仓” 的概念,通过光学和磁场控制,让病人无需手术就能把病治好。
传统的分子靶点治疗肿瘤、心血管等疾病的方式,相当于强制性破坏身体内的内生环境,会造成如炎症、感染等副作用。
健康仓的治疗理念是通过内在内生生物和外在磁场和激光控制,其能根据人体实际情况进行全自动化的针对性治疗。
“人只需要躺在健康仓里,不会有任何疼痛感知,甚至只是睡一觉,你的病就被治好了。” 蔡林涛说。
想要实现这样的终极目标,除了理论基础,也离不开多学科的知识融合。蔡林涛认为未来的医疗技术是一个综合学科的整合过程,如果想要实现理想的健康仓,需要生物人才、材料学人才、化学人才、物理人才等等专业的技术人员一起,共同讨论出一个可行的方案。
自 2008 年以来,蔡林涛加入中国科学院深圳先进技术研究院校研究纳米医疗技术至今已经 12 年。他所研究的 “以癌治癌” 同源靶向仿生纳米载药体系、光敏 GPS 癌细胞追踪系统等纳米技术治疗肿瘤方案,被 ACS nano、Advanced Function Materials、Advanced Science 等学术期刊转载。
研究之路任重而道远,但蔡林涛团队对未来纳米医疗的发展很有信心。他预言,“纳米医疗虽然研究的是一个微观的体系,但未来的纳米医疗研究会像 Google X 实验室一样,把很多学科交叉在一起,做一些以前不敢想象的事情。”
-End-
原文标题:吞下“外科医生”?中科院研发微纳生物机器人,自主游向肿瘤病灶,实现主动靶向癌症治疗
文章出处:【微信公众号:DeepTech深科技】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
213文章
31432浏览量
223605 -
AI
+关注
关注
91文章
41060浏览量
302568 -
人工智能
+关注
关注
1820文章
50314浏览量
266880
原文标题:吞下“外科医生”?中科院研发微纳生物机器人,自主游向肿瘤病灶,实现主动靶向癌症治疗
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
保隆科技拜访中科大机器人研究院参观交流
大象机器人产品赋能全球尖端科研与教育实践
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
中科院重庆研究院在势垒可光调谐的新型肖特基红外探测器研究中获进展
工业机器人的特点
《人民日报》报道!中科亿海微“中国芯”赋能具身智能机器人

安泰高压放大器在微纳机器人研究中的应用介绍
中国成功研发蚊子大小仿生机器人
纳芯微磁传感器技术推动人形机器人性能提升

飞利信与睿尔曼机器人、中科测源签署三方战略合作协议发力机器人产学研新模式




评论