 机器专家软件实现对Lexium 23伺服控制的具体步骤
机器专家软件实现对Lexium 23伺服控制的具体步骤

众所周知,EcoStruxure Machine Expert机器专家软件自带的Lexium 设备中不再包含Lexium 23系列伺服,那么如果要在新的ESME软件中控制早期的LXM23A伺服,应该怎么办呢?
下面介绍具体的实现步骤。
硬件:LMC058+LXM23A
软件:EcoStruxure Machine Expert V1.2.6
CANopen控制
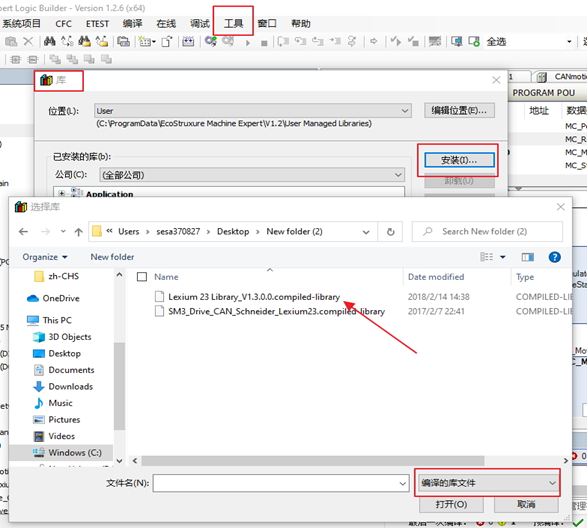
1、从SoMachine4.3中将已编译库Lexium 23 Library_V1.3.0.0.compiled-library-ge33 复制到桌面并重命名为Lexium 23Library_V1.3.0.0.compiled-library;
默认路径:
C:ProgramDataSoMachineSoftwareV4.3Managed
LibrariesSchneider ElectricLexium 23 Library1.3.0.0
2、打开ESME软件在依次工具---库----安装在弹出的对话框中选择你存放在桌面的库文件,如下图(注意在最后一步弹出的对话框中选择的是编译的库文件)
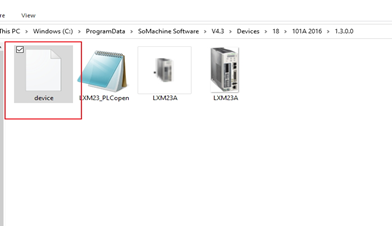
3、从SoMachine中将LXM23伺服的device文件拷到桌面或某个文件夹里;
默认路径:
C:ProgramDataSoMachineSoftwareV4.3Devices18101A 20161.3.0.0
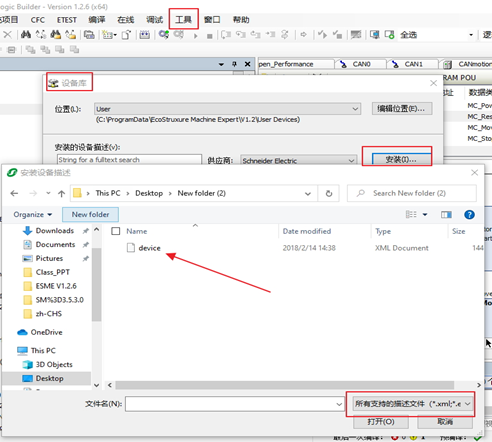
4、打开ESME软件在依次工具---设备库----安装,在弹出的对话框中选择你存放在桌面的device文件,如下图
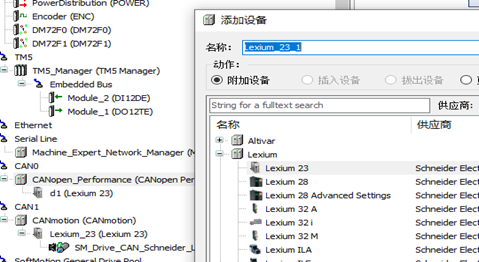
5、CANopen_Performance下即可正常添加LXM23A伺服;
6、编程实现
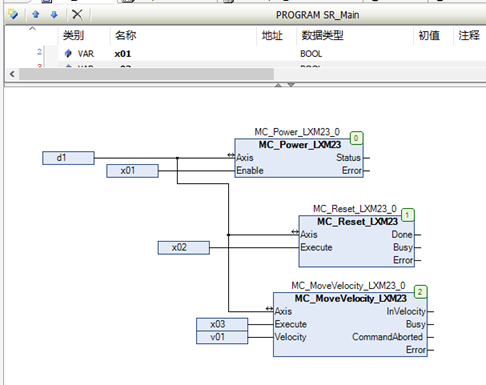
调用的功能块名称、用法与原SoMachine平台一致
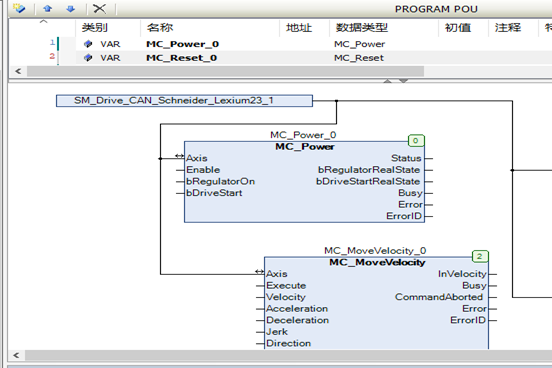
CANmotion控制
1、从SoMachine4.3中将已编译库
SM3_Drive_CAN_Schneider_Lexium23.compiled-library-ge33
复制到桌面并重命名为SM3_Drive_CAN_Schneider_Lexium23.compiled-library
默认路径:
C:ProgramDataSoMachineSoftwareV4.3Managed Libraries3S - Smart Software SolutionsGmbHSM3_Drive_CAN_Schneider_Lexium233.5.3.70
2、打开ESME软件在依次工具---库----安装,在弹出的对话框中选择存放在桌面的库文件安装;
3、从SoMachine分别拷贝出CANmotion下的LXM23伺服设备文件和电机设备文件;
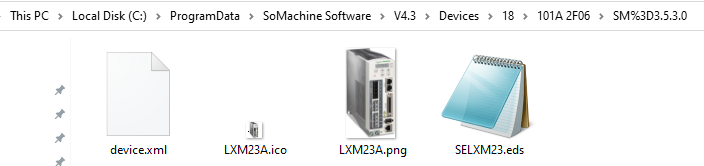
默认路径
C:ProgramDataSoMachineSoftwareV4.3Devices18101A 2F06SM%3D3.5.3.0
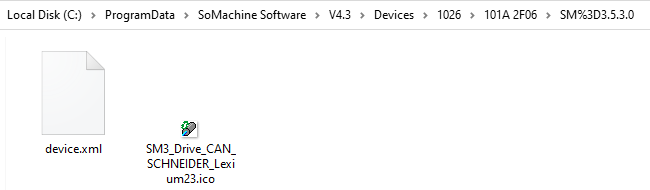
默认路径:
C:ProgramDataSoMachineSoftwareV4.3Devices1026101A 2F06SM%3D3.5.3.0
4、打开ESME软件在依次工具---设备库----安装,在弹出的对话框中选择存放在桌面的两个设备文件进行安装;
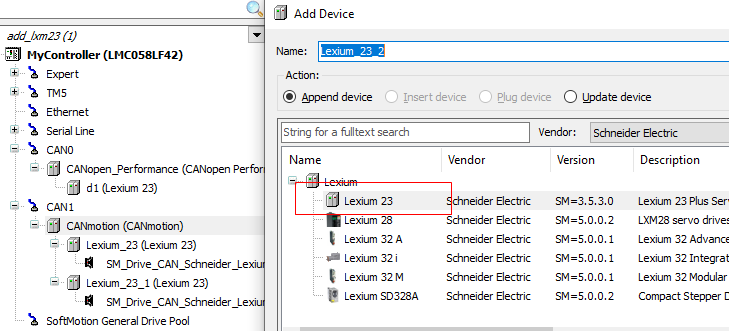
5、CANmotion下组态添加LXM23伺服;
6、编程实现
责任编辑:xj
原文标题:机器专家软件中如何实现对Lexium 23伺服的控制
文章出处:【微信公众号:施耐德自动化】欢迎添加关注!文章转载请注明出处。
-
伺服
+关注
关注
17文章
684浏览量
42799 -
施耐德
+关注
关注
5文章
166浏览量
24781 -
lexium32
+关注
关注
0文章
2浏览量
2324
原文标题:机器专家软件中如何实现对Lexium 23伺服的控制
文章出处:【微信号:SE_AUT,微信公众号:自动化小天地】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
数据滤波算法的具体实现步骤是怎样的?
MT6701绝对式磁编码器优化机器人关节伺服控制
铝丝键合的具体步骤
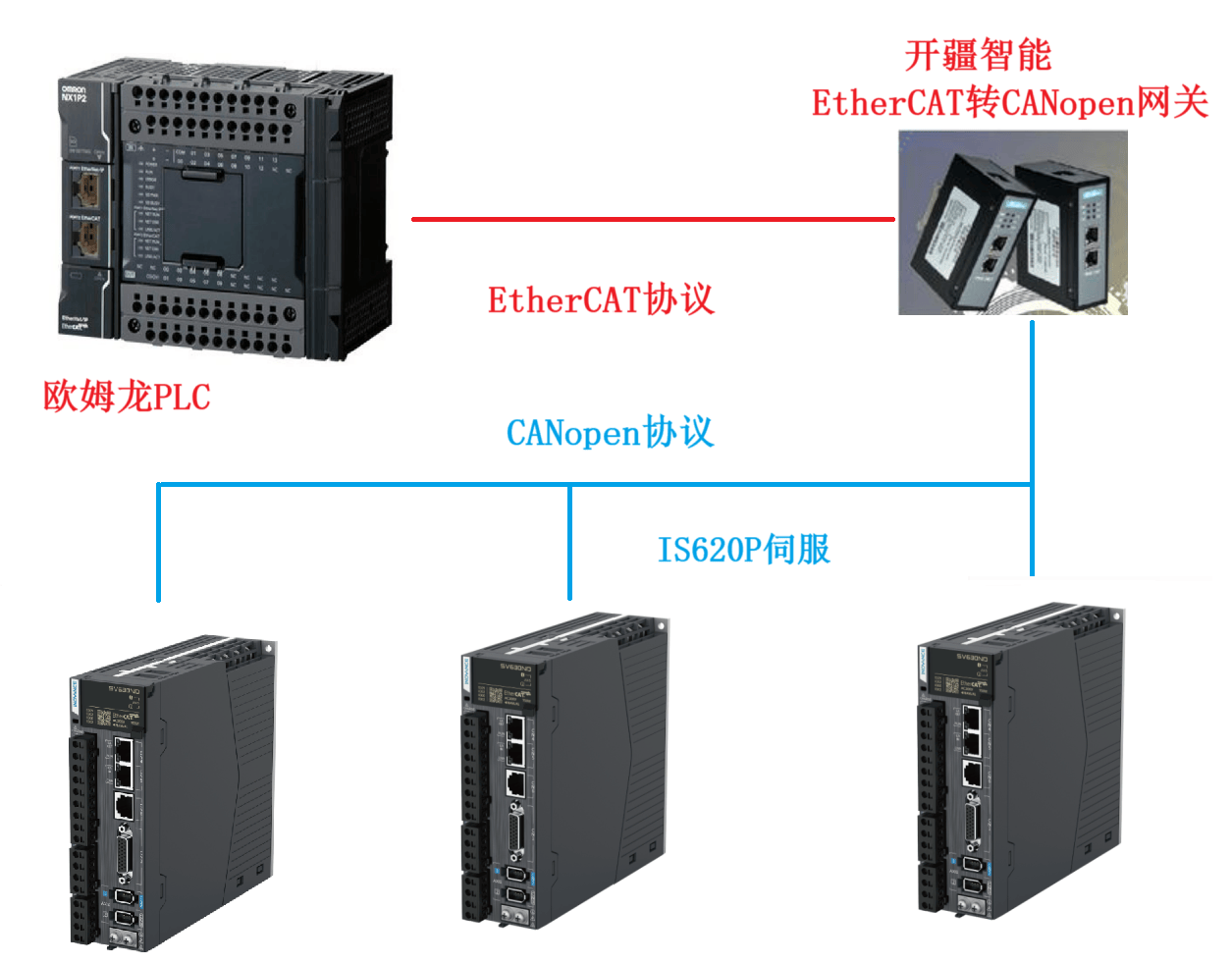
开疆智能EtherCAT转CANopen网关连接IS620P伺服配置案例
LXM18与M241进行MODBUS串行通讯案例

EtherCAT转CANopen网关与伺服器在汇川组态软件上的配置步骤

STM32与机智云连接实现步骤与技巧(上篇)

打开FSP配置器界面的具体步骤
EtherCAN转CANopen网关控制伺服电机






 工商网监
工商网监
评论