 科学家研发出可3D打印的自定义机器人
科学家研发出可3D打印的自定义机器人

中国天津大学的科学家开出了可3D打印的自定义机器人,该机器人能够实时缩放,监视细小的管道。并且单件设备具备软化和模块抓手,使其可以灵活的在奇异的形状中灵活运动。解决了在一些奇异管道中机器人无法灵活行动的问题。
之前的研究中列出了一些机器人的解决方案,但这些设备往往内部或者外部爬升,无法兼顾两者。尤其是对于埋在地下的管道无法通过外部来进行维护。
软机器人的发展,让复杂设备的制造变得更加容易,天津大学的科研团队通过优化让设备更加灵活的对管道进行检查和维护。
为了提高机器人的灵活性,科学家设计的一种软体的弯曲机制,让机器人承受高水平的变形。使用CAD软件创建设备便于升级,另外团队也能够添加模块或者调整夹具的直径。
改机器人两端有一个抓爪和三个进气管,可以控制并施加压力,这样可以让其做出“爬升”动作,目前机器人可以在16-38 mm的管道上爬升,还能在45°和90°的上爬升。让一些难以攀爬的管道维护变成可能。
责任编辑:YYX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223869 -
3D打印
+关注
关注
28文章
3653浏览量
118812
发布评论请先 登录
相关推荐
热点推荐
价值20万的机器人做大奖!创想三维携手智元,加速3D打印破圈
4月17日,消费级3D打印与具身智能赛道完成了一次产业触碰。 3D打印生态领创者 创想三维 联合具身智能独角兽 智元机器人 ,正式上线「Ma

3D视觉引导拆码垛:一文读懂“机器眼”如何指挥机器人搬货?
3D视觉引导技术。很多入门者会好奇,这双“眼睛”究竟如何看清货物、精准定位,又能无缝指挥机器人完成动作?本文将拆解3D视觉“扫描识别-坐标定位-机器人联动”的完整

禾赛科技2025年割草机器人3D激光雷达出货量第一
1 月 8 日,全球激光雷达领导者禾赛科技(NASDAQ: HSAI;HKEX: 2525)今日宣布,禾赛 2025 年割草机器人 3D 激光雷达出货量第一,2026 CES 现场搭载 3D 激光雷达的割草
常见3D打印材料介绍及应用场景分析
3D打印材料种类丰富,不同材料性能差异明显。本文介绍PLA、ABS、PETG等常见3D打印材料的特点与应用场景,帮助读者了解3D

中国科学院研发3D手型微纳机器人
微纳机器人是工作在微米至纳米尺度的“智能微型机器”,在精准医疗、环境修复等领域应用前景广阔。然而,当前微纳机器人多采用单一材料体系,功能扩展受限,复杂环境下的多刺激协同控制与多步操作成为科研挑战。为此,科研团队提出新思路,采用多
奥比中光领跑韩国机器人3D视觉市场
近日,国际权威行业研究机构Interact Analysis发布《韩国商用及工业移动机器人3D视觉市场分析》报告(以下简称“报告”)。数据显示,奥比中光在韩国商用和工业移动机器人3D视
国际类脑计算科学家Yulia Sandamirskaya教授加盟时识科技
近日,国际类脑计算与神经形态机器人领域知名科学家Yulia Sandamirskaya 教授,作为科学家顾问正式加入时识科技(SynSense)。
3D打印机器人堵头预警:加热器NTC热敏电阻响应速度测试
本文通过分析NTC热敏电阻在3D打印机器人加热器中的响应速度测试,探讨其如何预防堵头故障并应用于智能家居、工业及医疗等跨界场景,强调平尚科技元件的技术适配性与可靠性。
普渡科技推出3D感知AI扫地机器人PUDU MT1 Max
在持续探索机器人技术与真实场景深度融合的进程中,普渡机器人以场景驱动创新,正式推出PUDU MT1 Max 3D感知AI扫地机器人。它在MT1的基础上全面进阶,搭载
3D打印能用哪些材质?
3D打印的材质有哪些?不同材料决定了打印效果、强度、用途乃至安全性,本文将介绍目前主流的3D打印材质,帮助你找到最适合自己需求的材料。

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
基于NVIDIA AI的3D机器人感知与地图构建系统设计
机器人必须感知和理解其 3D 环境,才能安全高效地行动。这一点在非结构化或陌生空间中的自主导航、对象操作和远程操作等任务尤为重要。当前机器人感知技术的进展,越来越多地体现在通过统一的实时工作流与强大的感知模块,实现
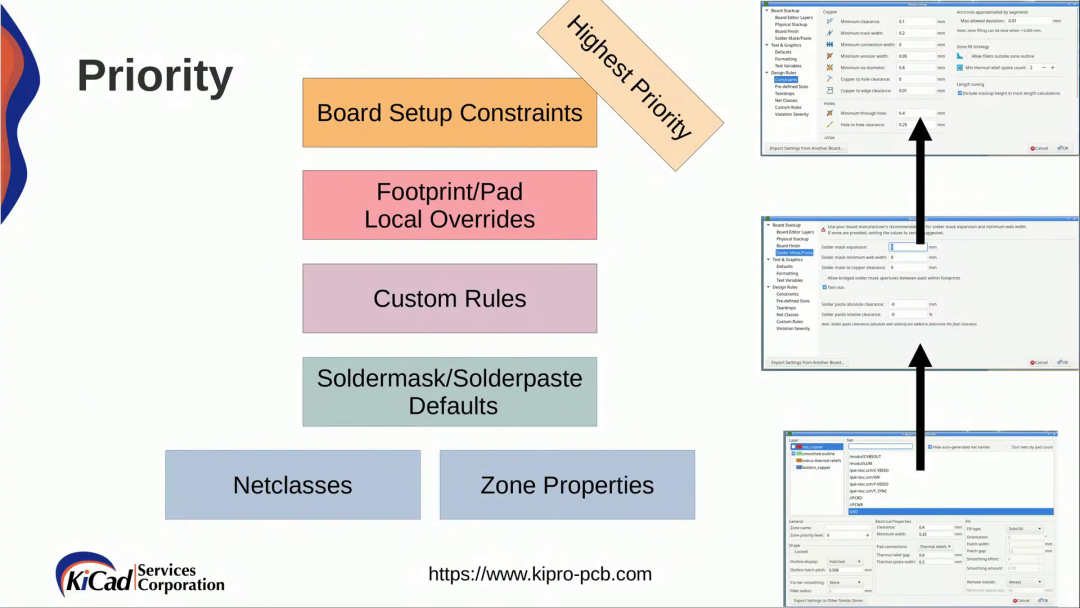
KiCad 中的自定义规则(KiCon 演讲)
“ Seth Hillbrand 在 KiCon US 2025 上为大家介绍了 KiCad 的规则系统,并详细讲解了自定义规则的设计与实例。 ” 演讲主要围绕 加强 KiCad 中的自定义
TechWiz LCD 3D应用:局部液晶配向
我们所说的局部摩擦是指给液晶盒中不同区域(可自定义区域)进行不同的液晶配向,所以也可以称之为局部掩膜、局部配向等。TechWiz LCD 2D和TechWiz LCD 3D都可以对液晶
发表于 06-16 08:46
HarmonyOS应用自定义键盘解决方案
自定义键盘是一种替换系统默认键盘的解决方案,可实现键盘个性化交互。允许用户结合业务需求与操作习惯,对按键布局进行可视化重构、设置多功能组合键位,使输入更加便捷和舒适。在安全防护层面,自定义键盘可以



评论