 FANUC机器人TCP三点法
FANUC机器人TCP三点法

三点法设置方法
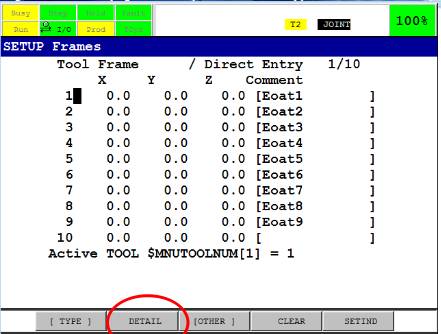
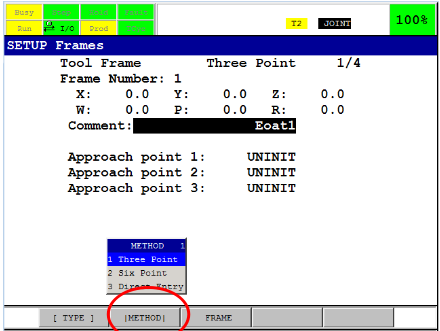
DETAIL–METHOD–回车进入三点法界面:
三点法操作步骤:
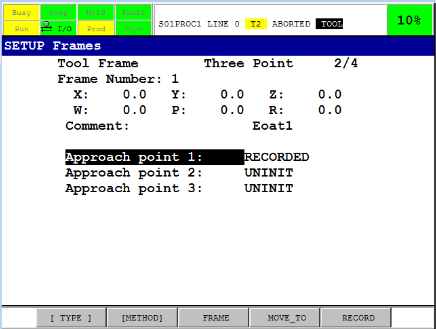
记录接近点1
a.移动光标到接近点1(Approachpoint1);
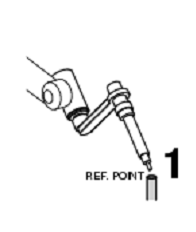
b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
c.按【SHIFT】+F5【RECORD】(位置记录)记录
记录接近点2
a.移动光标到接近点2(Approachpoint2);
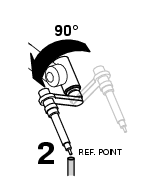
b.把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过360度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
记录接近点3
a.移动光标到接近点3(Approachpoint3);
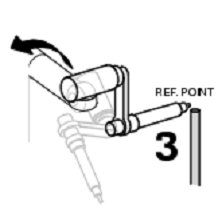
b.把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
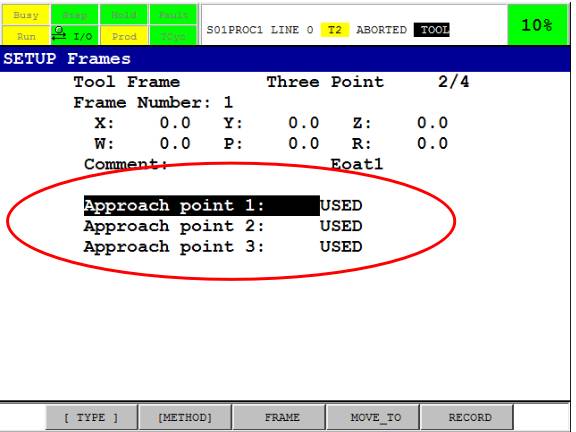
当三个点记录完成,新的工具坐标系被自动计算生成.Point1-3显示成USED,如下图所示:
责任编辑:xj
原文标题:FANUC机器人TCP三点法详解,你用过吗?
文章出处:【微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31439浏览量
223636 -
TCP
+关注
关注
8文章
1433浏览量
83765 -
Fanuc
+关注
关注
19文章
123浏览量
39152
原文标题:FANUC机器人TCP三点法详解,你用过吗?
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统机器人遇到意外阻力会硬顶,容
发表于 04-17 17:27
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节
及常见问题排查。 (一)Profinet转devicenet网关与Fanuc机器手臂接线易忽视细节(重中之重) Fanuc机器手臂为精密设备,接线规范影响通讯稳定性,有8个核心要点:

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
、芯片封装、功率模块的关键支撑;而低温烧结银正从实验室走向机器人、新能源、第三代半导体等产业核心,成为高端电子互连的 隐形推手。
一、春晚四家机器人:幕后推手与技术硬核
1 四家机器人
发表于 02-17 14:07
探索RISC-V在机器人领域的潜力
利用Gazebo仿真环境(在x86主机上运行)和MUSE Pi Pro上的ROS 2节点进行了联合仿真。
• 场景: 在PC的Gazebo中运行一个TurtleBot3机器人模型,MUSE Pi
发表于 12-03 14:40
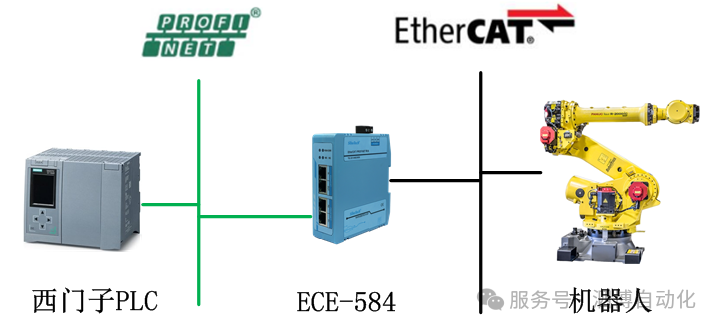
如何实现FANUC/埃斯顿/汇川机器人与西门子PLC实时数据互传?
在智能产线中,跨协议设备的高效协同是一大难点。当产线中既有西门子PROFINET系统,又配有EtherCAT机器人(如FANUC、埃斯顿、汇川)时,协议壁垒使数据互通变得复杂。通常,机器人
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
,以其"三屏异显"和"八路摄像头"的强悍能力,为机器人开发者提供了前所未有的强大算力平台。米尔电子基于其MYD-LR3576
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
。
同时,磁传感器还是多传感器融合中的 “稳定锚点”。在机器人运动系统的融合定位中,它常作为核心基准。以 “足球机器人” 项目为例,当视觉传感器因强光出现噪点、超声波传感器受声波反
发表于 08-26 10:02
工业机器人的特点
者的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例
本案例是ModbusTCP主站通过开疆智能ModbusTCP转Devicenet网关连接发那科机器人的配置案例,操作分为三个配置1:ModbusTCP主站配置2:ModbusTCP转Devicenet网关配置3:FANUC

开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例
本案例是通过开疆智能Profinet转ModbusTCP网关将西门子PLC与ABB机器人进行通讯 因西门子PLC采用Profinet协议,而ABB机器人采用的是ModbusTCP通讯。故采取此种方案

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
:机器人还会将自身传感器获取的环境信息与预先建立的机场高精度地图进行匹配。通过对比地图中的特征点和实际感知到的环境特征,进一步精确机器人在地图中的位置。同时,利用这种地图匹配方式,可以对定位结果进行实时
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating System 2)这一先进机器人开发框架的实用指南。随着
发表于 04-27 11:24



评论