 通过智能机器人和自主的磁操纵技术实现结肠镜检查的未来
通过智能机器人和自主的磁操纵技术实现结肠镜检查的未来
这一里程碑使智能机器人系统的前景更加接近,该系统能够将仪器引导至体内的精确位置以进行活检或检查内部组织。医生或护士仍会在手边做出临床决定,但是操作设备的艰巨任务却转移到了机器人系统上。
最新的发现-“通过智能和自主的磁操纵技术实现结肠镜检查的未来”-由利兹大学领导的国际科学家团队进行了12年的研究。
该研究今天(10月12日,星期一)发表在科学杂志《自然机器智能》上。使用该系统的患者试验将于明年或2022年初开始。
利兹大学的机器人与自主系统教授Pietro Valdastri正在监督这项研究。他说:“结肠镜检查为医生打开了一扇隐藏在人体深处的世界之窗,它在筛查大肠癌等疾病方面发挥着至关重要的作用。但数十年来,该技术一直保持相对不变。
“我们开发的系统使医生或护士更容易操作,对患者的痛苦也减轻了。这标志着结肠镜检查更广泛地迈出了重要的一步,这对于确定结直肠癌至关重要早。”
因为该系统更易于使用,所以科学家希望这可以增加可以执行该程序的提供者的数量,并允许更多的患者进行结肠镜检查。
结肠镜检查是检查直肠和结肠的程序。传统的结肠镜检查是使用插入肛门的半柔性管进行的,有些患者感到非常痛苦,需要麻醉。
研究团队开发了一种较小的胶囊状装置,该装置被束缚在一条狭窄的电缆上,然后插入肛门,然后被引导到位-不是由医生或护士推动结肠镜,而是由位于机器人手臂上的磁铁在病人身上。机械手操纵胶囊时会在患者周围移动。该系统基于磁力吸引和排斥的原理。
患者外部的磁铁与体内胶囊中的微小磁铁相互作用,使其在结肠中导航。研究人员说,与传统的结肠镜检查相比,它将减轻痛苦。
引导机械臂可以手动完成,但这是一种很难掌握的技术。作为回应,研究人员开发了不同级别的机器人协助。这项最新研究评估了不同级别的机器人协助在协助非专业人员进行该程序方面的效果。
责任编辑:lq
-
机器人
+关注
关注
206文章
27051浏览量
201431 -
智能机器人
+关注
关注
17文章
826浏览量
81333 -
机械臂
+关注
关注
9文章
475浏览量
23827
发布评论请先 登录
相关推荐
自主移动机器人(AMR)功能和特点

协作机器人和工业机器人区别在哪?
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
【爱芯派 Pro 开发板试用体验】基于爱芯派 Pro 开发板的警用安防智能机器人设计

高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
机器人和变位机怎么协调运行
slamware自主定位导航解决方案赋能机器人智能移动

智能轮椅导航定位的研究现状及趋势

协助机器人和工业机器人的区别 协作机器人的工作原理
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
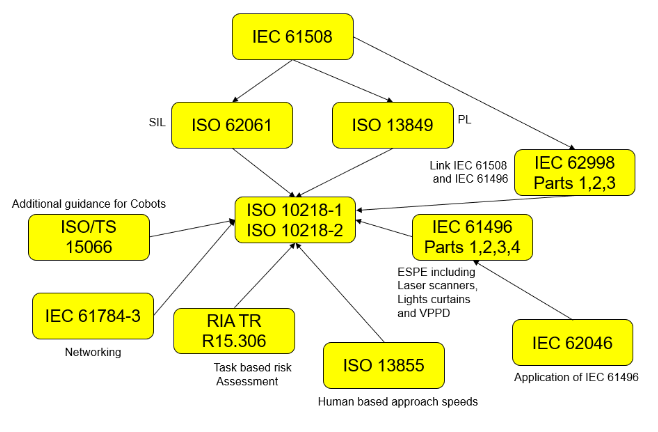
与工业机器人、协作机器人和移动机器人最相关的功能安全标准





 工商网监
工商网监
评论