 研究人员设计了一种可重新配置的机器人RTCR
研究人员设计了一种可重新配置的机器人RTCR

以色列一所大学的仿生和医疗机器人实验室的研究人员设计了一种可重新配置的机器人RTCR,这种机器人能够利用最小数量的驱动器在空中跟踪爬台阶和克服障碍。RTCR(可重构连续跟踪机器人)可以通过一系列链接和一个单驱动器改变其整个身体的形状,并利用它在前进过程中建立自己的轨道。
仅使用2个电机(当前设计中为3个电机)驱动时,跟踪机器人即可更改其形状。机器人可以越过障碍物而不会碰到它们。该机器人可应用于搜救,农业,管道检查,工业维护等。
该机器人利用一个安装在常规轨道上的常规推进电机(执行器)来研发这款机器人的。常规轨道上有一个锁定机构位于前端。组成轨道的连杆设计独特,可以在-20到+45之间自由旋转。当他们到达机器人的前面时,也可以锁定在0或+20。
机器人轨道上的每一个连杆都配有一个锁定销,当连杆穿过该连杆时,根据所设置的执行机构,锁定销可以被激活,从而使下面的连杆处于一个特定的角度。
连杆的锁定使机器人从柔性变为刚性,并允许RCTR抬起并越过障碍物。机器人的尾部有一个被动系统,它可以分离每个连杆上的锁定销,当轨道经过机器人尾部顶部时,重置轨道的灵活性。
这种能力使机器人变得即可灵活又可刚性,使它能够越过障碍或爬楼梯。虽然这本身就是一巧妙的设计,但机器人确实有一个缺点:它只能向前或向后移动,不能操纵或改变方向。研究人员表示,一个简单的解决方案是使用一对带有防滑转向的履带,就像坦克改变方向一样。他们甚至正在创造一种运动规划算法,使机器人能够在不同的地形上移动。
另外团队需要弄清楚如何获得刚性和柔性链接的最佳组合,以克服障碍。它还需要找出如何在保持简单的同时使机器人易于操作。
责任编辑:YYX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31455浏览量
223688 -
电机
+关注
关注
145文章
9706浏览量
154810
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统
发表于 04-17 17:27
探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能机器人的一个强大起点。
致谢: 感谢进迭时空、发烧友提供开发板,以及论坛中各
发表于 12-03 14:40
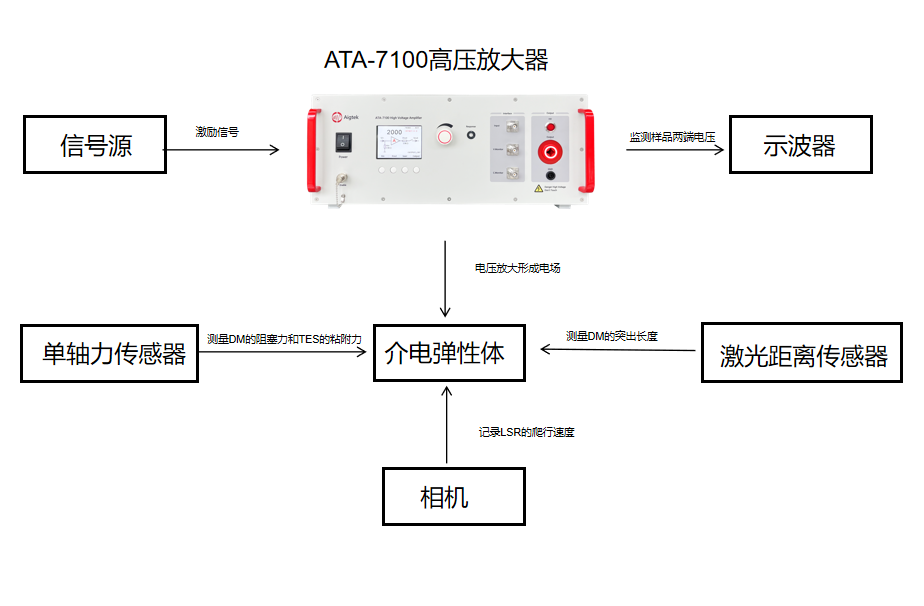
高压放大器在介电弹性体制成的软机器人研究中的应用
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 多屏显示:显示配送状态、路径信息及简单的触摸操作界面,方便工作人员监控与交互。
开启您的下一代机器人项目综上所述,瑞芯微RK3576凭借其卓越的多屏支持、强大的多摄像头接入能力和高效的低功耗表现
发表于 10-29 16:41
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、高效且经济的方式训练、开发、测试和验证

什么是机器人?追溯机器人技术的演变和未来
的定义。机器人的定义,真如表面看起来那么简单直白?还是比我们所认为的更为复杂呢? 从本质上讲,机器人是一种可编程机器,能够感知、处理信息,并自主或在

机器人看点:宇树新专利可提升机器人表演效果 蔚来资本入股具身智能公司原力灵机 美信科技新设机器人制
给大家带来一些机器人相关讯息: 宇树新专利可提升机器人表演效果 据企查查APP信息显示,宇树科技股份有限公司“一种基于数字孪生的
介电弹性体软机器人研究:高压放大器的应用实践
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了

轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,
发表于 06-11 14:30
明远智睿SSD2351开发板:语音机器人领域的变革力量
源的开发资料为开发者提供了深入研究和定制语音机器人功能的基础,开发者可以根据不同的应用需求,对语音识别算法、语音合成引擎等进行优化和改进。一对一的技术支持则能及时解决开发过程中遇到的难
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的有效途径。
结语
本书第7章和第8章内容系统性强,从基础理论到代码实践,为读者提供了机器人视觉与SLAM的完整知识框架。未来,我计划结合书中案例,进一步探索多传感器融合、自主导航等高级应用,争取在
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错
发表于 04-30 01:05



评论