 LiDAR如何构建3D点云?如何利用LiDAR提供深度信息
LiDAR如何构建3D点云?如何利用LiDAR提供深度信息

我们可通过传感技术来获取有关周围环境的信息,从而使我们的日常生活受益:提高任务效率,增强安全性,或纯粹出于娱乐目的。LiDAR是这样一种传感技术,使用激光来测量到物体的距离,并可用于创建周围环境的3D模型。LiDAR 系统捕获的图像中的每个像素都将具有与之关联的深度。这样可以更好地识别物体,并消除仅采用图像传感器获得的2D图像中可能存在的模糊。
LiDAR如何构建3D点云?
LiDAR 通常使用直接飞行时间(dToF)技术来测量到物体的距离。短的激光脉冲发出后,其中的一些光被场景中的对象反射回并被传感器如ArrayRDM-0112A20-QFN探测到,以准确记录激光脉冲往返所用时间(见图1)。使用已知的光速,基于此dToF测量可计算出距离。这是视场内的单距离测量。
为了构建周围环境的完整图片,需要在场景中的许多不同位置重复进行此点测量。这可通过安装固定的传感器和让激光在整个场景中旋转和扫描,或使用光束操控(beam steering)技术如微机电系统 (MEMS) 镜来实现。
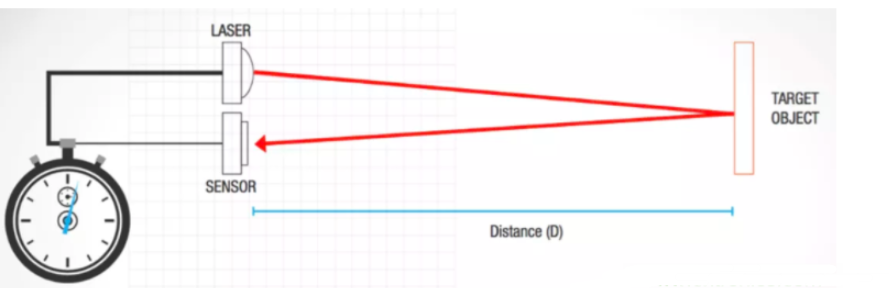
图1:dToF技术示意图
LiDAR系统通常依赖于以下关键组件:照明源,传感器,光学器件,光束操控,信号处理和电源管理(图2)。在性能方面,最关键的要素是照明源和传感器。照明通常受用眼安全考量的限制,因此对系统性能的最大影响通常取决于传感器。
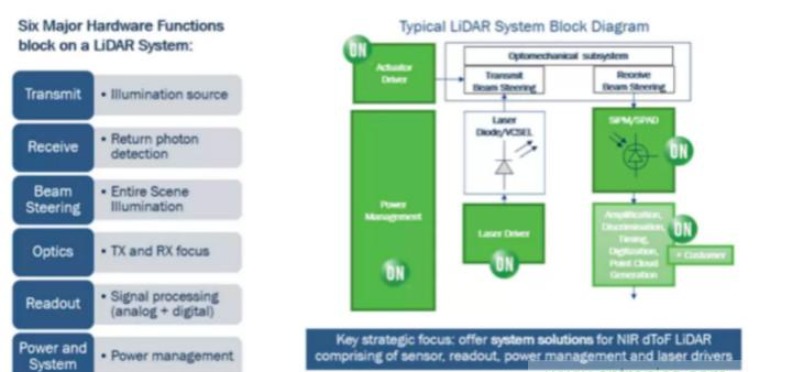
图2:剖析含传感器的dToF LiDAR系统
在许多场景下,系统运行只有有限的信号返回,从远处或低反射率物体返回的信号可能只包含少量的光子。因此,传感器应尽可能灵敏。
LiDAR传感器的灵敏度受不同因素综合影响。首先,最重要的是探测效率,即入射光子将产生信号的概率。然后是对低入射通量或最小可检测信号的灵敏度。某些传感器如PIN二极管没有内部增益,因此单个探测到的光子将不会记录传感器固有噪声以上的信息。
雪崩光电二极管(APD)具有一定的内部增益(〜100x),但是,由少量光子组成的入射信号不会记录噪声以上的信息,这要求它在一定的持续时间内对返回的信号进行整合。工作在盖革(Geiger)模式下的传感器,如硅光电倍增管(SiPM) 和单光子雪崩二极管(SPAD)的内部增益约百万级(1,000,000x),因此,单个光子也会产生信号,即使在内部传感器噪声以上的信息也能可靠地探测到。这允许设置一个低阈值来探测最微弱的返回信号。
虽然SiPM和SPAD由于高增益而克服了许多噪音问题,但在实际的LiDAR应用中还需考虑到另一个噪声源-环境太阳光或处于阳光下。我们常力求探测非常微弱的LiDAR返回信号,同时受到不想要的太阳光照射。因此,问题变成了最大化其中的一个信号(返回的激光),同时忽略或最小化噪声(阳光)。一种方法是利用传感器的单光子灵敏度,并寻找时间相关的光子。
这种多次dToF测量的方法是通过多次重复该过程(每次通过多个激光脉冲得出一个dToF测量值)来实现的。无需为每次测量计算距离,而是将每个飞行时间(ToF)值添加到直方图或分布图。结果是一个如图3所示的曲线图。
背景计数在时间上不相关-也就是说,相对于脉冲发射时间,它们在时间上随机到达。这些计数可以忽略不计,因为它们是由于阳光引起的噪声。峰值代表时间相关的计数-大量计数都以相同的时间值到达,表明是来自目标的信号。该峰值可以转换为特定帧的距离,且该过程可再次开始。即使每帧每像素有几十个激光周期,也可以实现30 fps的帧速率。
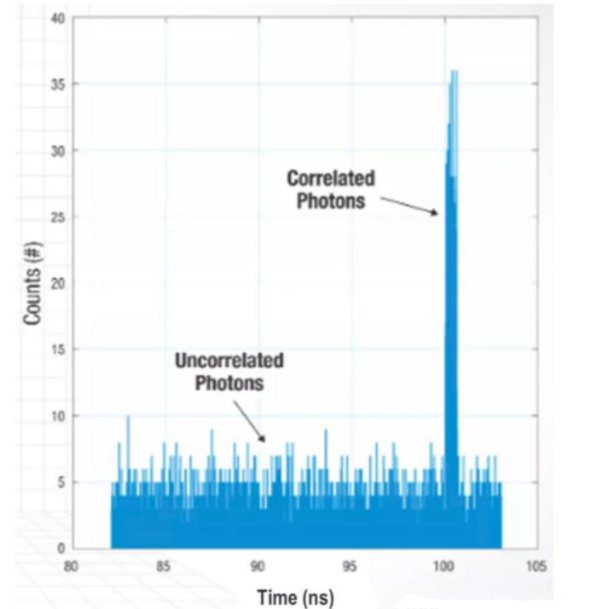
图3:LiDARToF直方图例
尽管SiPM 或SPAD传感器可通过结合单光子灵敏度与时间相关技术来查看微弱的返回信号,但PIN二极管或APD传感器会丢失在太阳背景中丢失的计数。因此,用这些其他传感器类型进行测距根本无法达到那么远或那么高效。
现实世界中如何利用深度信息?LiDAR如何提供帮助?
迄今为止,消费者移动应用程序仅通过图像传感器技术如使用结构光就已启用了许多功能。飞行时间(ToF)技术已在某种程度上被整合到手机中数年,以添加深度感知并赋能摄影功能,如快速自动对焦和“散景”人像效果。
最近,dToF成像LiDAR传感器已集成到最新的消费类移动设备中,它比以前的技术提供更好的深度信息,且无疑将大大增加利用此数据的移动应用程序数。3D信息可用于实现3D绘图应用程序和改进的扩增实境和虚拟实境(AR / VR)体验。
在汽车和工业应用中,安全性很重要,仅用图像传感器识别物体然后进行自动决策和导航有局限性,这凸显了需要通过融合不同的传感模式来获取更多信息。LiDAR结合其他传感技术如相机、超声波和雷达,可提供更多的冗余,从而提高负责导航或与环境交互的决策算法的置信度。这些技术中的每一种都有独特的特性,可提供不同层面的信息,在不同情形下各有利弊。

图4:对比不同的传感器技术
要在汽车中启用高性能LiDAR系统,高度灵敏的传感器如SiPM是最高效的接收器。安森美半导体的SiPM提供了无与伦比的性能和工作参数:高光子探测效率,低噪声和暗计数率结合低工作电压,感温性和工艺一致性。
ArrayRDM-0112A20-QFN是12像素线阵SiPM,解决市场对LiDAR的需求。它在905 nm处具有领先业界的18%光子探测效率,905 nm是高性价比的广泛LiDAR系统市场的典型波长。此外,它是市场上首个商用现货线阵SiPM和首个符合车规的 SiPM。
编辑:hfy
-
传感器
+关注
关注
2577文章
55505浏览量
793953 -
mems
+关注
关注
129文章
4529浏览量
199616 -
激光脉冲
+关注
关注
0文章
90浏览量
10666 -
LIDAR
+关注
关注
11文章
368浏览量
31595
发布评论请先 登录
激光雷达LiDAR技术的工作原理和应用场景

倍加福基于双目视觉技术的SmartRunner 3D传感器介绍

探索MAX40662:用于LiDAR的四通道跨阻放大器
iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!

LiDAR线圈如何驱动无人驾驶技术
自动驾驶模型是如何“看”懂点云信息的?

从3D传感器到立体相机,解锁工业应用新可能

技术资讯 I 多板系统 3D 建模,提升设计精度和性能

智驾感知系统中立体视觉相对于LiDAR的性能优势

【CIE全国RISC-V创新应用大赛】+基于MUSE Pi Pro的3d激光里程计实现
iTOF技术,多样化的3D视觉应用
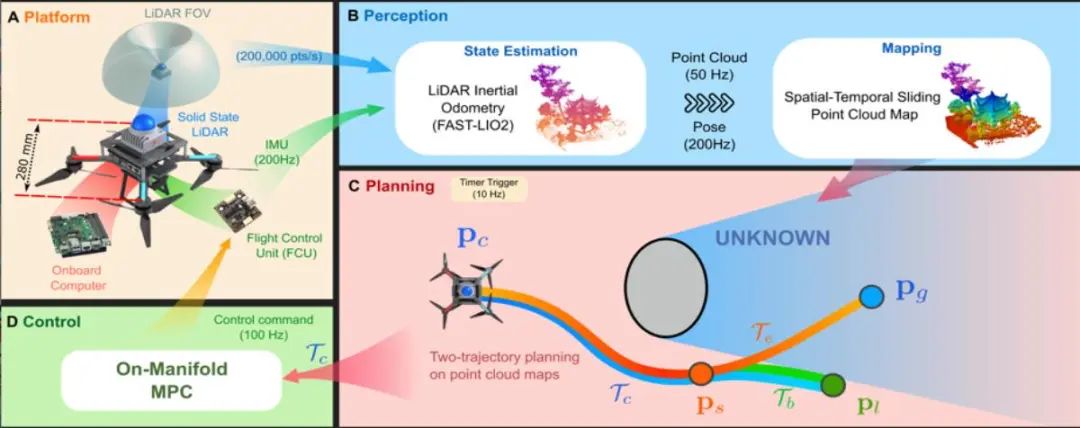
港大开发新型无人机飞控,LiDAR传感器采集信息传至云端生成路径
告别漫长等待! 3D测量竟然可以如此的丝滑

SONY推出新型dTOF激光雷达(LiDAR)深度传感器AS-DT1



评论