 机器人都能自主阅读化学文献并生成标准化论文了
机器人都能自主阅读化学文献并生成标准化论文了

许多实验室已经开始使用能够自主决定实验方案,并且操纵机器人完成实验的“人工化学家”,但是这种机器人是高度定制的,控制系统和内部指令都是为了非常具体研究目标所设计,很难完成其他的任务。最近,来自格拉斯哥大学的研究人员则开发出了一种新方法,让这种人工化学家可以自主阅读化学文献并生成标准化的操作程序,使得这种机器人的适用范围变得非常广阔。

以007工作制运行的实验员。图源:Nature, 2020, 583(7815):237-241.
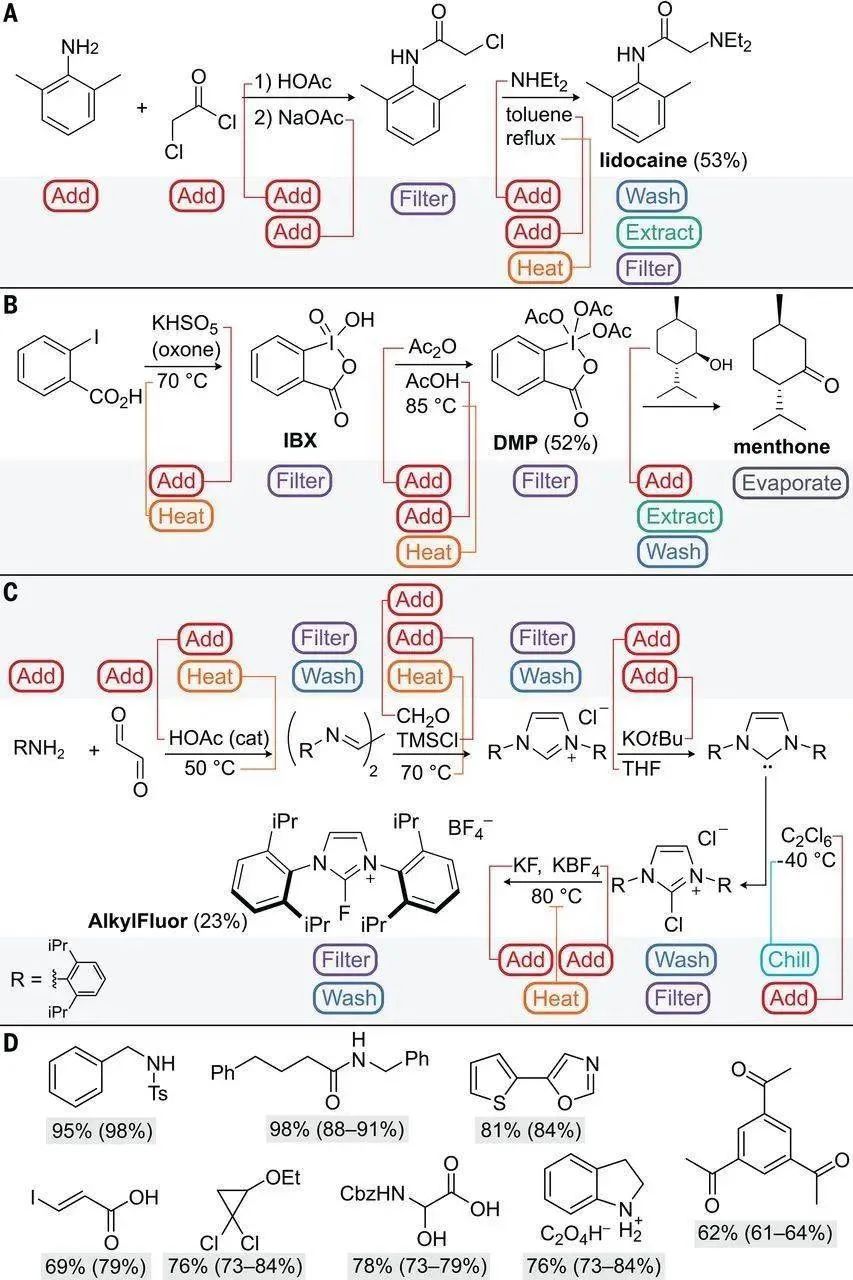
英国格拉斯哥大学Leroy Cronin团队设计了一种利用自然语言处理功能为机器人化学家创建新的指令集的方法,名为“SynthReader”,让机器人化学家可以自己阅读文献,识别其中概述有机和无机化学合成程序的部分,形成通用的自主合成流程,之后生成的化学代码和硬件控制模块结合,转化为机械手指令,执行实验任务。现阶段已经成功实现了阅读文献后,自动合成12种化合物,包括利多卡因止痛药、德斯马丁高碘烷氧化剂和氟化剂烷基氟。
研发团队开发的化学描述语言(XDL)和可视化开发环境(ChemIDE), 可以将文献中的合成过程文字转化为化学容器中的反应序列,当然目前这一转化过程需要人工纠错, 直接用自然语言即可(论文中是英语),无需编程知识,在接下来的研究中,研究人员表示:“完全可以通过化学自动校正功能自动执行此验证步骤”。
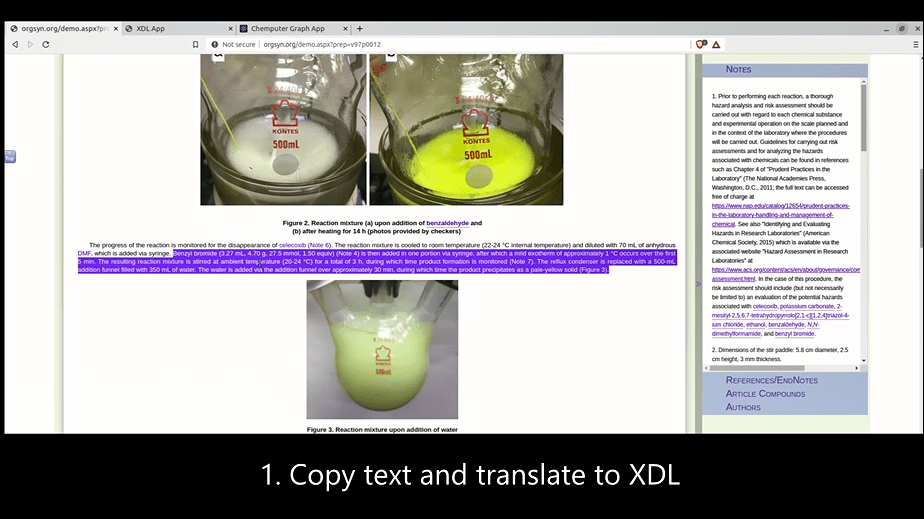
复制一段文献输入XDL
人工纠错

生成可执行的指令
设置物理平台并运行程序 Leroy Cronin团队之前就曾开发出用于自动完成实验的机器人化学家,将其命名为Chemputer,可以实现为单一研究不断重复实验的目标。(https://www.nature.com/articles/s41586-018-0307-8)这次新开发的系统则大大扩展了这种机器人的适用范围。在初步的验证中,Chemputer成功实现了从文献中自动合成的12种化合物,包括利多卡因止痛药(产率为53%)和德斯马丁高碘烷氧化剂( 总收率52%),不仅适用于短合成,该系统也验证了氟化剂AlkylFluor的五步合成,每步平均产率为75%,总收率为23%。
用自然语言训练AI是人工智能的重要发展方向,随着阅读并完成指令转化的数量不断积累,不断纠错,Leroy Cronin团队开发的这种方法有着巨大的应用潜力。例如,在线共享的XDL文件可以让发展中国家更容易地获得药物,实现更有效的国际科学合作,或者是代替科研人员阅读并复现大量的相关论文,挑选可复现且有突破的研究结果作为参考,甚至可以搭乘星际飞船,在太空、月球、火星或者其他地方建立化学实验室,按照需要迅速合成特殊的化学物质,应对突发状况。
参考文献:
1. https://phys.org/news/2020-10-digital-chemistry-breakthrough-words-molecules.html 2. https://science.sciencemag.org/content/370/6512/101.full
责任编辑:xj
原文标题:提升效率好助手: AI化学家可直接读论文且007工作制
文章出处:【微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
213文章
31432浏览量
223612 -
AI
+关注
关注
91文章
41060浏览量
302569 -
人工智能
+关注
关注
1820文章
50314浏览量
266885
原文标题:提升效率好助手: AI化学家可直接读论文且007工作制
文章出处:【微信号:zhishexueshuquan,微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
从PLC到机器人:实时操作系统如何决定能力上限
我国首个人形机器人与具身智能标准体系发布,灵境智源参与编制
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
千台如一:揭秘阿普奇支撑机器人规模化量产的全链条标准化体系

自主生产:制造业的未来

恩智浦自主移动机器人设计要点




评论