 机器人WORKVISCAL中组态PROFINET网络选择哪个版本?
机器人WORKVISCAL中组态PROFINET网络选择哪个版本?

在S7中组态KUKA机器人时我们会遇到很多的GSD文件版本,到底哪一个是适合我们所使用的呢?在机器人WORKVISCAL中组态PROFINET网络时选择的版本是怎么回事?
KUKA机器人在进入PROFINET网络时需要安装PROFINET KRC-NEXXT软件。下图:

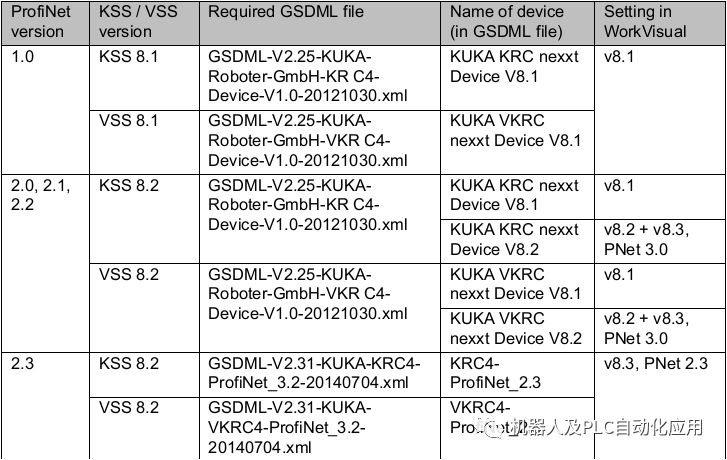
KUKA软件的PROFINET安装软件的说明文件 :

其中规定了软件版本对应了GSD文件的版本类型和WORKVISCAL中选的版本号。
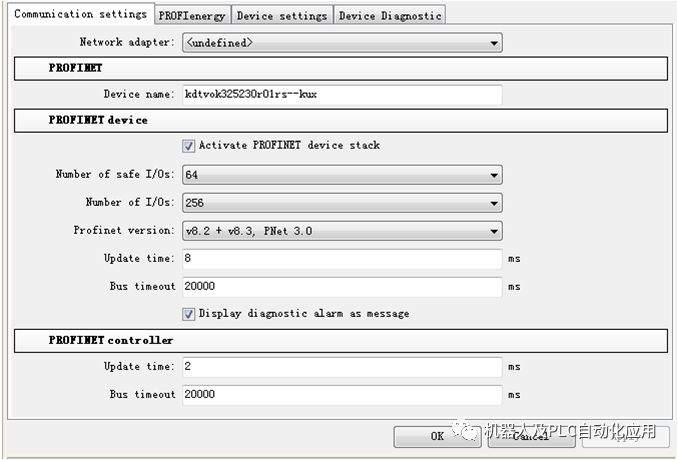
WORKVISCAL的profINET设置页面:需要选择相对应版本号与KUKA上安装的PROFINET KRC-NEXXT软件版本相一致
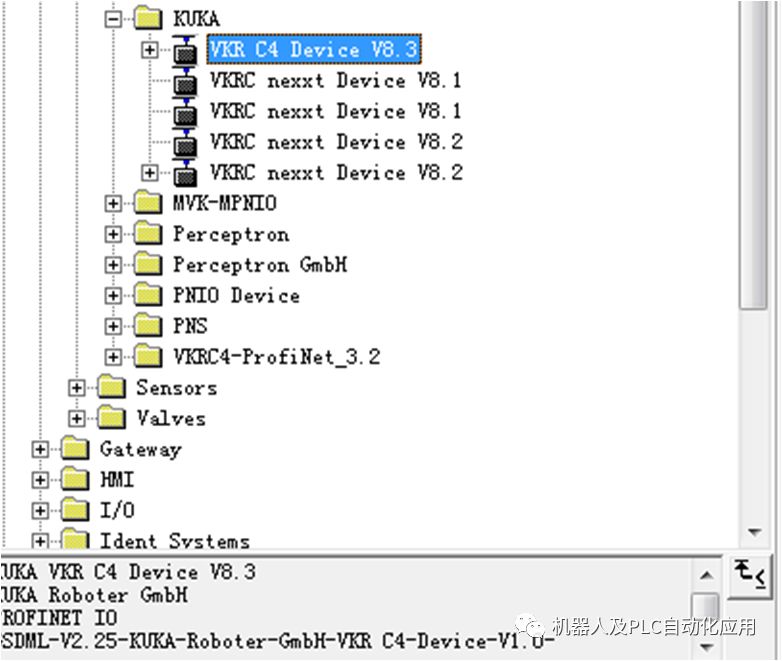
S7中GSD文件的版本号也要与PROFINET KRC-NEXXT软件的版本号相一致。
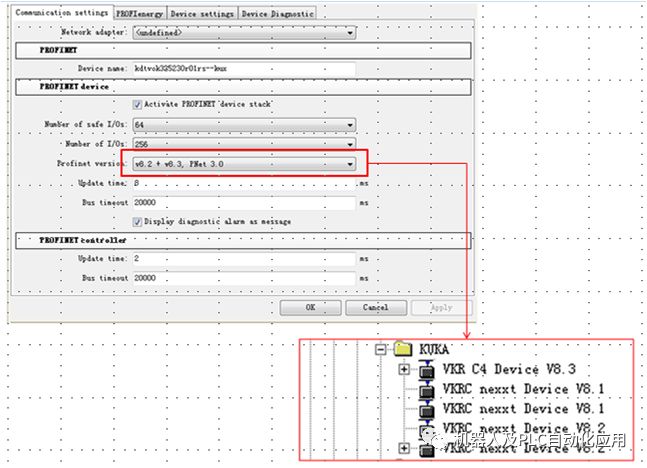
因此组态版本与KUKA机器人所按装软件需要相对应,包括机器人WORKVISCAL的设置也是需要对应的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31402浏览量
223560 -
Profinet
+关注
关注
9文章
2332浏览量
28332
原文标题:机器人perofinet的硬件组态版本应用对照
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
在汽车焊装车间的技术角,工程师小陈的笔记本记满了“跨协议难题”:当搭载Profinet的库卡机器人遇上CCLINKIE总线的三菱PLC,数据交互像隔着玻璃喊话——PLC发送的坐标指令要“绕地球半圈
发表于 06-04 14:31
表情机器人网络大赛
表情机器人网络大赛近日,广东省计算机协会智能软件与机器人分会举办的表情机器人创意设计全国大赛于2012年9月1日正式开始,比赛历时三个月零七天,大赛邀请了华南理工大学软件学院的朱金辉博
发表于 09-11 09:17
表情机器人网络大赛
广东省计算机协会智能软件与机器人分会举办首届表情机器人大赛,大赛官网:http://www.maskrobot.org/表情机器人网络大赛近日,广东省计算机协会智能软件与
发表于 09-15 09:44
三菱机器人初级培训班--华南机器人应用中心
:三菱机器人常用指令介绍+工作站工作环境搭建 下午:在SolidWorks中仿真实现整个打螺丝过程 4.实践课:上午:在三菱机器人中示教点位,编程实现整个工作站 下午:继续编程实现整个工作站
发表于 03-03 13:11
请教各位Labview与ABB机器人怎么进行Profinet通讯
想用Labview做机器视觉,怎样将Labview通过视觉算出的工件的偏移量以及偏移角度的值通过Profinet网络赋于ABB机器人里的变量(变量类型:num)?
发表于 10-31 13:15
智能打电话,机器人哪家比较好 如何选择合适的电销机器人
和价值。这里我们用中绅智能科技有限公司推出的中绅电销机器人来举例吧,因为电销团队的多聚智能AI电销机器人打电话功能还是比较全面以及强大的。大家在选择
发表于 05-03 13:18
如何选择机器人电机
youshuang ding在机器人中,执行机构一般分为液压驱动和电机驱动两种类型,其中又以电机驱动最为常见。本文主要讨论一般机器人驱动机构中电机的选择问题。
发表于 10-19 10:31
K-Bot版本4机器人的设计教程
描述机器人k-bot v.4-pcb01电源K-Bot版本4机器人的设计理念是,任何人都可以使用教育机器人进行组装、编程和教学活动。主要是为了让任何教育水平的老师都能在课堂上和学生一起
发表于 08-22 07:43
Profinet转Modbus TCP网关连接搬运机器人配置案例
本案例是西门子1200PLC通过Profinet转Modbus TCP网关连接搬运机器人配置案例,所需设备为西门子1200PLC,耐用通信技术Profinet转ModbusTCP网关,搬运机器
发表于 06-07 11:16
profinet转ethernet网关连接发那科机器人配置案例
本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运机器人配置案例。所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc机器
发表于 08-03 17:58
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet网关与西门子PLC1200连接
本案例EtherCAT转profinet(Profinet转EtherC
发表于 10-24 14:04
开疆智能Canopen转Profinet网关连接工博士GBS20机器人配置案例
本案例是介绍将支持canopen通信协议的机器人机器人接入到西门子Profinet网络中,由于两种协议不能直接通讯,故选择了canopen转
EtherNet IP转Profinet网关连接FANUC机器人配置指南(PROFIENT组态篇)
据缓冲区,确保与PLC和机器人网络的兼容性。最后,通过数据映射配置界面,将PLC的输出区映射至EtherNet/IP的输入寄存器,反之亦然,并在TIAPortal中创建监视表进行测试,验证机器




评论