 研究人员设计了一种名叫Amaran的机器人
研究人员设计了一种名叫Amaran的机器人

椰子是非常美味的,可以用来制作各种各样的产品,但是收获椰子并不是一件容易的事。经过专门训练的收割者必须冒着生命危险爬上大约15米高的树,才能砍下一束椰子。印度的一组研究人员设计了一种名叫Amaran的机器人,可以减少人类采摘者冒这种风险的需要。但是机器人能胜任这项任务吗?
研究人员在最新一期的IEEE/ASME Transactions on Mechatronics上发表了一篇论文,描述了这种爬树机器人。在实验室测试的同时,他们还比较了Amaran的椰子收获能力和一个50岁的老练收割者的能力。虽然这个人在总速度方面胜过机器人,但机器人的耐力却很出色。
为了攀爬,Amaran依靠一个环状的身体,围绕着直径不等的树木。该机器人携带一个控制模块、电机驱动器、电源管理单元和无线通信接口。八个轮子可以帮助其在树上下移动,也可以绕着树干旋转。Amaran由地面上的一个人控制,他可以使用应用程序或操纵杆系统来引导机器人的动作。
一旦Amaran接近它的目标,一个附加的控制器单元会挥舞一个4自由度的机械臂来剪断椰子束。作为一项安全功能,如果Amaran的主电池没电了,备用单元会插入,以帮助机器人返回地面。
印度南部Amrita Vishwa Vidyapeetham大学的助理教授Rajesh Kannan Megalingam说,他的团队从2014年就开始研究Amaran。“世界上没有两棵椰子树是一样的。每一个的大小都是独一无二的,并有其独特的排列整齐的椰子束和叶子,”他解释说。“因此,建造一个完美的机器人是一项极具挑战性的任务。”
“No two coconut trees are the same … So building a perfect robot is an extremely challenging task.”
—Rajesh Kannan Megalingam, Amrita Vishwa Vidyapeetham University
在实验室测试机器人时,Megalingam和他的同事发现,当树干相对于垂直轴的倾斜度达到30度时,Amaran能够爬树。Megalingam说,许多椰子树,特别是在某些环境条件下,都是以这样的角度生长的。
接下来,研究人员在田间对Amaran进行了测试,并将其收获椰子的能力与志愿者进行了比较 -- 这些树的高度从6.2米到15.2米不等。
人类平均需要11.8分钟才能收获一棵树的椰子,而Amaran在平均每棵树花费的时间为21.9分钟(值得注意的是,其中14分钟是专门用来在树的底部安装机器人,这是在它开始攀爬之前)。
Photo: HuT Labs
但是Megalingam指出,Amaran在一天之内可以收获更多的树。例如,在他们的试验中,人类收割者可以每天爬15棵树,而只要操作者不累的话,机器人每天最多可以收获22棵树。尽管机器人目前是遥控操作的,但未来的改进可能会使它更具自主性,提高爬坡速度和收获能力。
“我们的最终目标是使这种产品商业化,并帮助椰子种植户,”Megalingam说。“在喀拉拉邦,只有7000名受过训练的椰子树攀岩者,而其需求实际要大约50000名受过训练的攀岩者。印度其他一些地区的情况也类似,比如Tamil Nadu、Andhra和Karnataka,那里大量种植椰子。”
他承认,目前机器人的成本是影响其广泛部署的一个障碍,但他指出,社区成员可以共同努力,共同分担机器人的成本和利用率。他指出,最重要的是,“使用Amaran采摘椰子不会对人的生命造成危险。任何受过适当训练的人都可以操作Amaran。之前,通常只有男性工人从事这种爬树采摘工作。但是,无论性别、体力和技能如何,任何人都可以操作Amaran。
-
驱动器
+关注
关注
54文章
9137浏览量
157221 -
机器人
+关注
关注
215文章
31800浏览量
224986 -
控制模块
+关注
关注
2文章
149浏览量
19928
原文标题:机器人Amaran可以帮忙爬树摘椰子啦
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机器人超声波避障测距
江智康养机器人
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
消防机器人电池完整设计方案
探索RISC-V在机器人领域的潜力
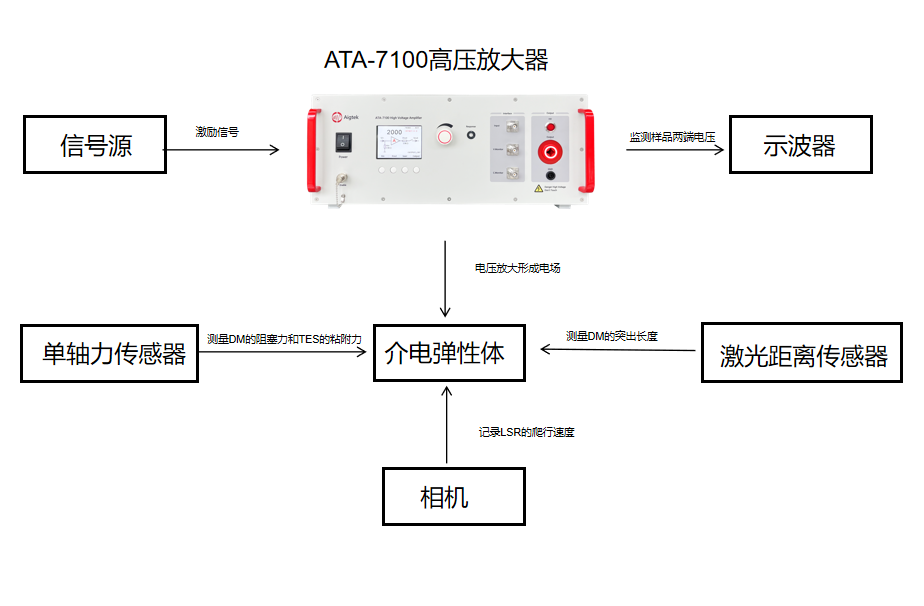
高压放大器在介电弹性体制成的软机器人研究中的应用
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人

什么是机器人?追溯机器人技术的演变和未来

介电弹性体软机器人研究:高压放大器的应用实践

工业机器人的特点
高压放大器在软体机器人研究中的应用




评论