 机器人激光钎焊的整体组成
机器人激光钎焊的整体组成

机器人激光钎焊的整体组成:
二极管激光器构造原理:
1、偏振耦合—为进一步提高激光功率,可对激光束进行偏振耦合,类似于波长耦合,两个线性极化激光束可通过选用适合的镜片进行耦合。
2、波长耦合—为提高激光器在输出端的激光功率,可将不同波长的激光光束通过合适的,绝缘的镜片耦合到一起。
3、二极管堆栈—为了提高二极管堆发出的激光功率,将多组二极管堆叠加在一起。
5、聚焦透 镜—将二极管堆发出的分散的光束聚焦成适合光纤传播的光束。
6、准直透镜—将发散光束变成平行光。

二极管激光器堆栈原理:
一个二极管激光片 包含大量独立的发射极单元 (型号0.5 x 3 μm²) 这些单元被成排安装在冷却单元上,单独的二极管激光巴条通过堆叠,构成了二极管堆栈。
Laserline激光焊设备简介:
Laserline总线电路RS485:
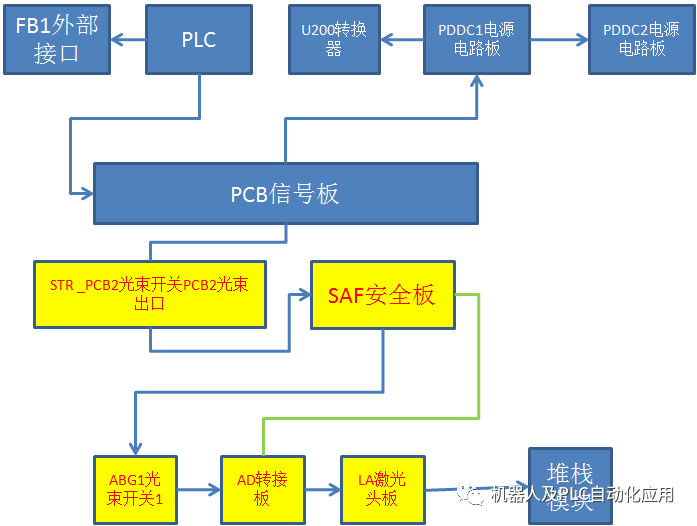
简述Laserline各安全部件连接示意图:
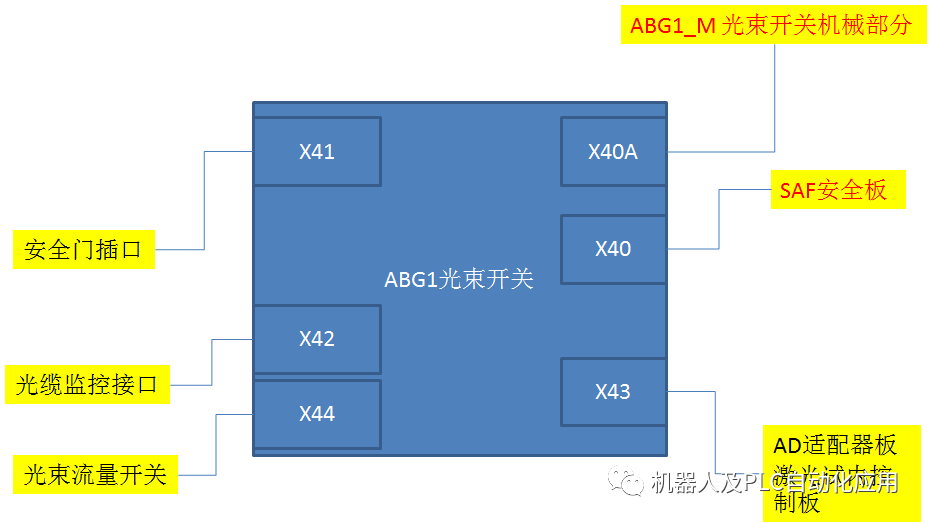
1.ABG光闸开关
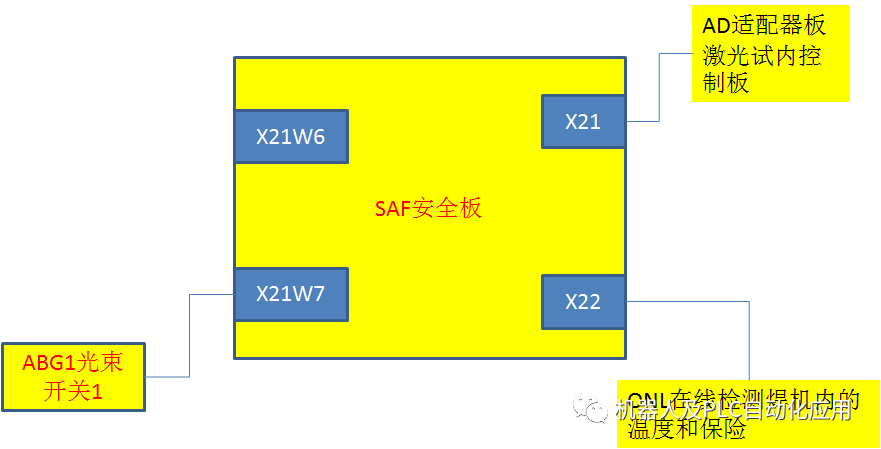
2.安全控制板:
3.信号采集板:
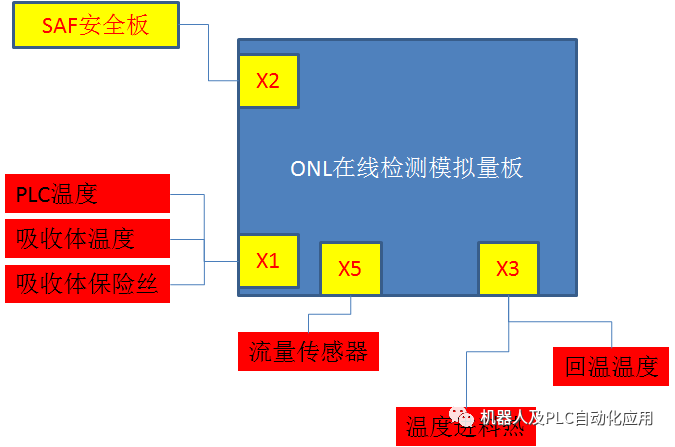
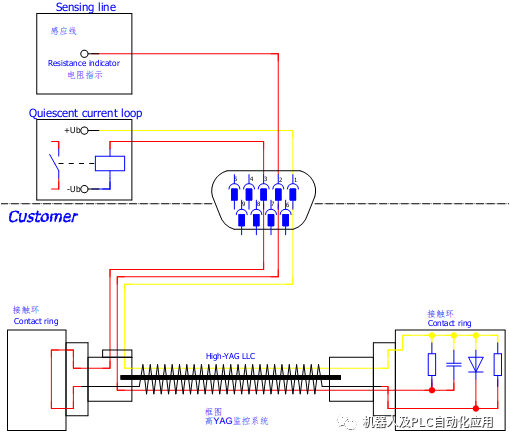
光缆的检测:
光缆监控
,防止光缆断,通过测量电阻值.
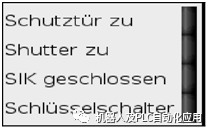
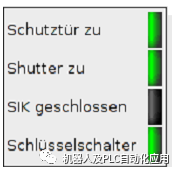
Schutztürzu 安全门关:
用户安全门打开
用户安全门关闭(外部安全回路A158=E846)
Shutterzu 快门关:
激光快门打开(激光器出光)
激光快门关闭
SIK zuSIK 关:
激光安全回路打开
激光安全回路关闭(内部安全回路)E903 -SIK_OFFEN- A897激光请求
Schlüsselschalter钥匙开关:
钥匙开关在档位"0„
钥匙开关在档位“1”
或 "2“
安全回路:
• 安全门及外部急停通过X3A进入到激光器,当外部安全回路断开或急停故障时激光器立即停止工作。
• 通过X3A
进入到激光器后通过主板网络连接到快门模块上,出现故障时快门关闭。
机器人控制部分:
1.IO域
E897-902 激光焊
E1297-E1360 送丝机
E473-476/E1409-1416 K1 电箱
E2145-2148 切丝阀
E516 7轴压力检测
E1009-1024 3轴阀的控制
E641-E699 ALO3焊头的范围
ANA6 机器人的移动速度
ANA10 送丝速度
ANA12激光焊功率
ANA13 焊头的上下方向位置
-
二极管
+关注
关注
149文章
10462浏览量
179645 -
机器人
+关注
关注
213文章
31494浏览量
223771 -
激光器
+关注
关注
19文章
3018浏览量
64819
原文标题:Laserline二极管激光器应用之KUKA机器人程序分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
禾赛科技全面领跑机器人激光雷达市场

工业机器人TOP1,切入人形机器人赛道,意欲何为?

探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
工业机器人的特点
华工科技智能激光除草机器人项目落户哈尔滨新区
AGV/AMR机器人单线激光雷达选型指南




评论