 KUKA机器人的VXworks系统的使用
KUKA机器人的VXworks系统的使用

KPC - KUKA PC
在每个处理器内核上除了运行三个另外的控制器相关的实例库之外,还运
行一个独立的安全实例库。
核 1: VxWorks、Windows、Safe A
核 2: RC (Robot Control)、Safe B
Windows 7 操作系统和 VxWorks 需要 RAM 存储器。
库卡虚拟网卡由 VX-Works 管理
KLI (virtual5) 始终与 VxWorks 侧进行通讯。
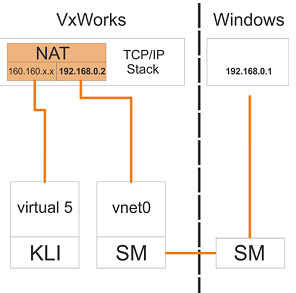
SM 共享存储的驱动程序,VxWork 和 Windows 之间的虚拟网络接口.
vnet0 VxWorks 逻辑虚拟接口至 Windows 层面.
在标准供货方案中,KLI 已默认设置为静态 IP 地址 172.31.1.147。
VxWorks是一个多任务环境, 任何一个正在执行的程序都可称之为任务。
每一个任务都有自己的上下文。上下文保存在任务控制块中, 是任务转为运行状态时要查看的CPU的环境资源和系统资源。一个任务的上下文包括: 任务程序计数器、CPU寄存器和浮点寄存器、动态变量和调用函数的栈、标准输入输出的I/ O分配、延时的时间、时间片的大小、内核控制结构、信号处理、调试和性能监视。
----- VXWORKS 与WINDOWS 进行通讯的文件:--Knet.config文件-------------
RtosConfig
;-----------------------------------------------------------------------
; KUKA Roboter GmbH
;
; 主机IP地址映射的配置
; (将在运行KRC更新时保留);
;-----------------------------------------------------------------------
;-----------------------------------------------------------------------
; 主机IP地址映射的配置
; 此处定义的映射是指专用网络连接
; Windows和VxWorks通过Vnet网络驱动程序。
;Format:
;"" = "
;-----------------------------------------------------------------------
[HostTable]
"WINDOWS" = "192.168.0.1"
"VXWORKS" = "192.168.0.2"
1.[HostTable]
"WINDOWS" = "192.168.0.1" windows 的IP地址
"VXWORKS" = "192.168.0.2" VxWORKS的IP地址
-
VxWorks
+关注
关注
3文章
351浏览量
100011 -
中央处理器
+关注
关注
1文章
126浏览量
17126 -
KUKA机器人
+关注
关注
4文章
144浏览量
10107
原文标题:KUKA机器人的VXworks系统的使用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论