 机器人主气缸C50气管连接说明
机器人主气缸C50气管连接说明

这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象。在作机器人E1轴移动时报拉拽故障。下面让我们分析一下气路。
伺服焊的第七轴(MQB)随动:
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程。
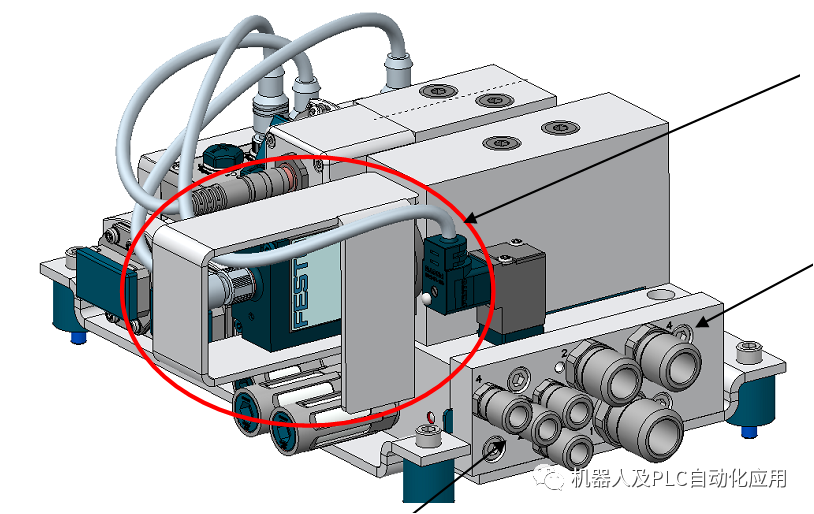
(FESTO伺服焊钳控制器)
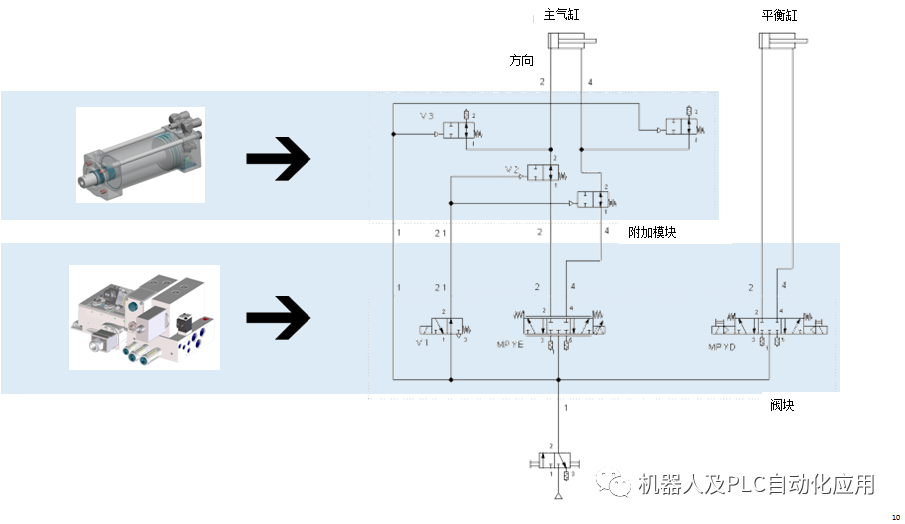
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
主气缸(C50)气管连接说明图:
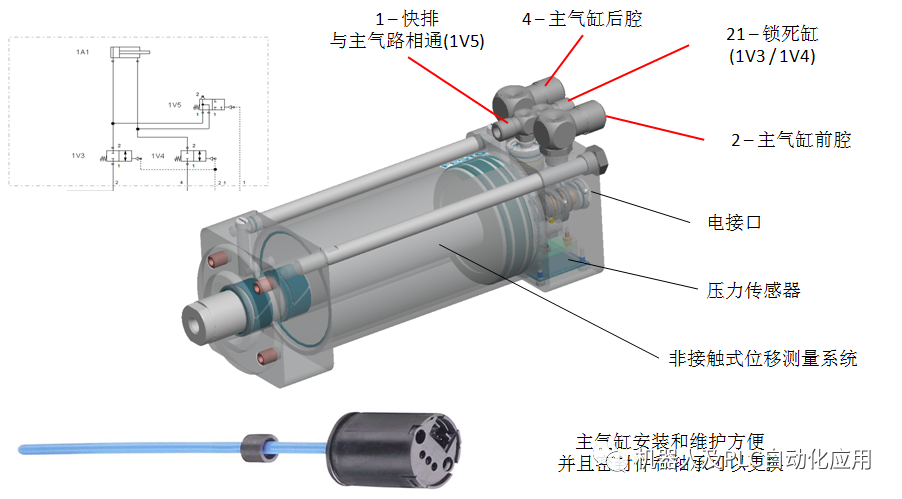
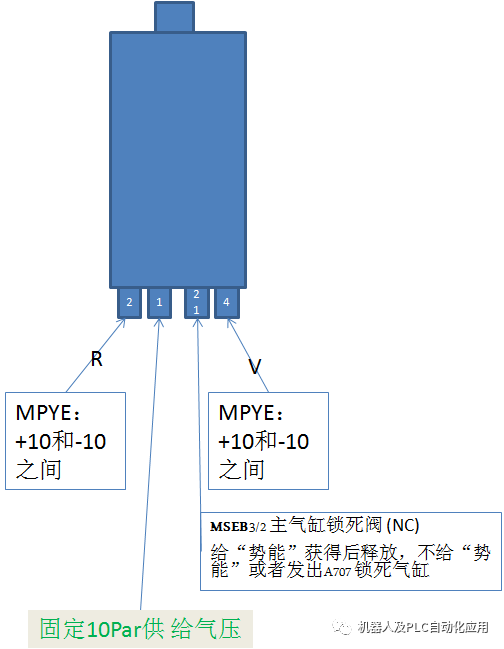
MSEB:控制锁死阀,给主气缸21的解锁压力不大
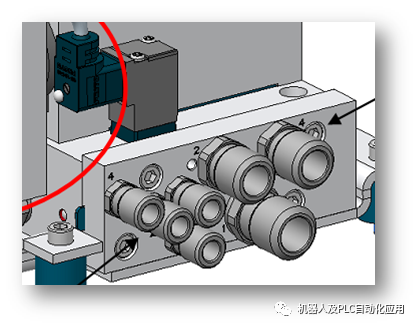
注意:阀座出气口的标号1/21是接到主气缸上的1/21的。
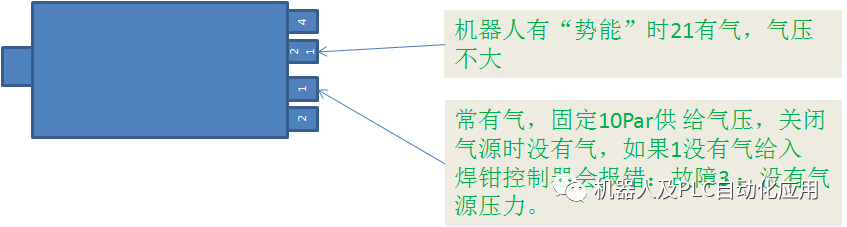
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制)。
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力。
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障。
1.检查气源供给。检查气管连接。
2.检查主气缸附加块(隔断阀)。
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17879浏览量
195150 -
机器人
+关注
关注
213文章
31455浏览量
223678 -
监控
+关注
关注
6文章
2400浏览量
59610
发布评论请先 登录
相关推荐
热点推荐
在 VisionFive 2 上实现机器人伺服控制
到 VisionFive:
连接:
演示中使用的机器人平台由两个伺服组成,可以连接到0和1伺服控制板的端口。
连接完成后,需要按照以下说明
发表于 03-05 07:09
【新品推荐】电子谷DP29大电流连接器,坚守工业机器人主供电连接的可靠边界
近两年,工业机器人智能装备正持续成为制造业的高频关注点。从新能源产线、3C自动化,到仓储物流与特种作业机器人,在设备持续向高负载、高速度、高可靠性演进的今天,行业关注点正在从「功能是否实现」,逐步

端侧智联:机器人主板架构革新与边缘计算的协同进化
2025年至今,机器人行业正式迈入端侧智能规模化落地期,2026年这一趋势将持续深化,端侧算力下沉将成为行业核心升级方向。机器人主板与边缘计算深度协同成为主流解决方案,将核心算力与AI算法部署在
智能AI机器人定制开发_AI陪伴对话机器人主板方案
随着人工智能技术的飞速发展,AI机器人逐渐渗透到家庭陪伴、教育科普、商业接待等多个领域。为了满足多样化的应用需求,AI机器人硬件架构需具备“高性能、低功耗、多形态、易落地”的特点。AI机器人采用联发

具身机器人走得稳不稳?它可以说了算!
对走得稳!实测环境拓扑:ZMC600E主站连接TI双从站,模拟具身机器人主从节点状态,使用EtherCAT-Analyzer分析仪分析数据。pc:运行ZMC主站软

从边侧到端侧: 边缘计算与机器人主板的融合创新
Jetson AGX Thor计算平台,以2070 TFLOPS的算力实现7.5倍性能跃升,让机器人感知、决策、执行全流程实时化成为现实。这两大巨头的技术动作指向同一核心——边缘计算与机器人主板的深度融合,正从根本上重构机器人的
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
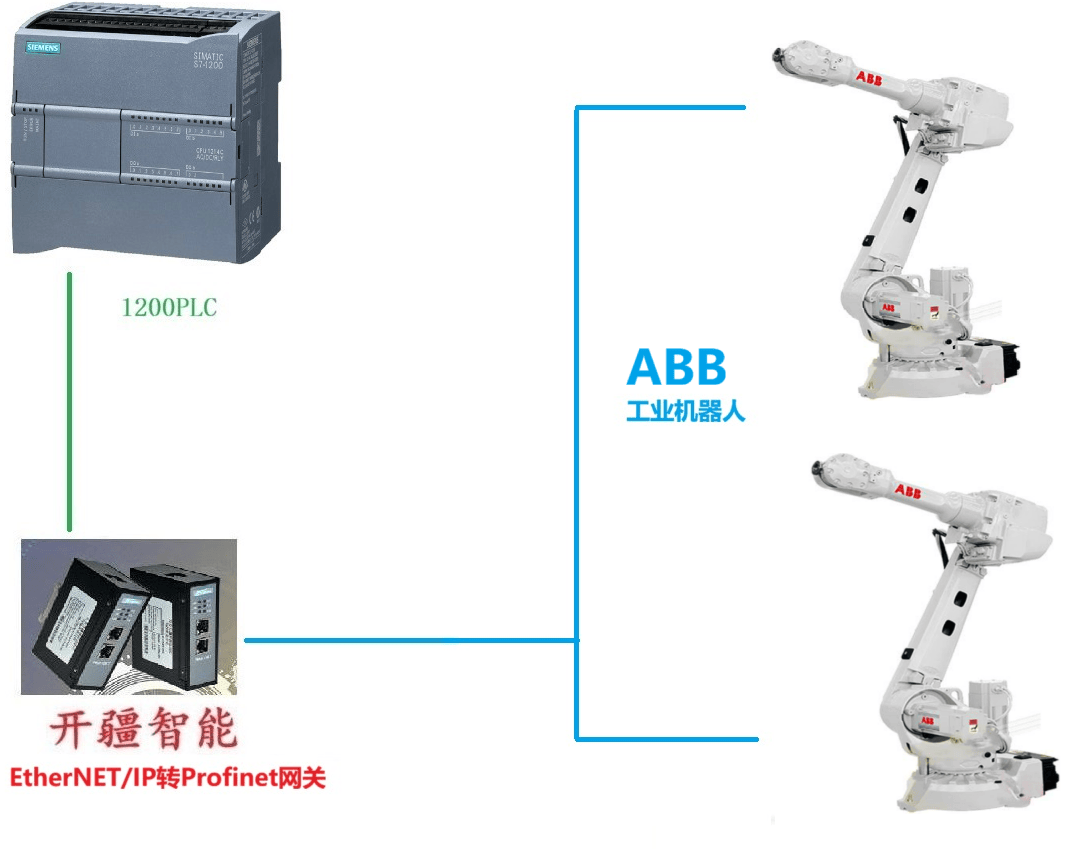
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
本案例是ABB机器人作为Ethernet/IP主站连接作为Ethernet从站的网关,并由网关将数据转换成Profinet协议并被西门子PLC读写。
商用清洁机器人 “不掉链” 的秘诀:Amass LCB50 系列连接器来守护
在商场、写字楼、机场等大型公共场所,商用清洁机器人早已成为高效保洁的“主力军”。它们需在复杂路况下长时间连续作业,而设备能否稳定运行,关键就藏在负责电力与信号传输的连接器里。AmassLCB50

工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
NC403(C50)高性能噪声二极管现货库存
NC403(C50)高性能噪声二极管现货库存NC403(C50)是Noisecom推出的一款高性能微波噪声二极管,专为射频和微波应用设计。NC403(C50)采用C50封装,适用于需要
发表于 06-03 10:31
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例
。 配置过程: 1.MODBUS/TCP基于以太网,故ABB机器人在使用时需要有616-1PCINTERFACE选项。(在机器人主菜单中,选择“系统信息”查看选项) 2.MODBUS/TCP通讯介质

机器人主轴选型攻略:Kasite三款必备主轴实力推荐
汽车制造、3C精密加工、航空航天等领域的优选方案。本文将系统解析Kasite机器人主轴的选型推荐策略。德国进口Kasite高速电主轴将主轴与机械手臂完美结合,为汽

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02



评论