 刚刚处理了一个机器人带抓手上SMC的连续故障
刚刚处理了一个机器人带抓手上SMC的连续故障

最近遇到了一个SMC故障,和大家分享一下.
SMC 输入模块无电源灯,没有电源指示,用机器人控制夹具气阀,有输出,更换IO模块故障依旧,因此判断是网络通讯模块故障并进行更换.
更换SMC阀后出现机器人阀导失灵故障,先是先导阀不亮,对先导阀进行更换,故障消除,在此试车发现最末端夹具控制阀故障,给输出信号,指示灯不亮.更换最末端阀,试车正常,工作了一台车后,气阀在此失灵,给输出信号,指示灯不亮.在断电更换阀座时,保险被烧坏.
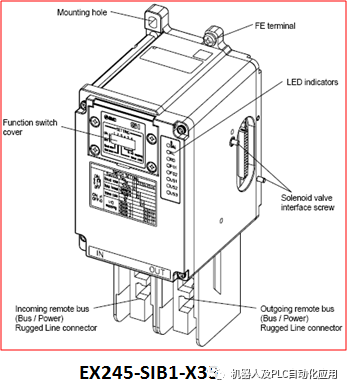
保险烧毁后,对线路接头进行检查,发现IBS插头的24V电源插头碎了,插头损坏是造成阀导无电主要原因,是插头损坏使得电压降低.
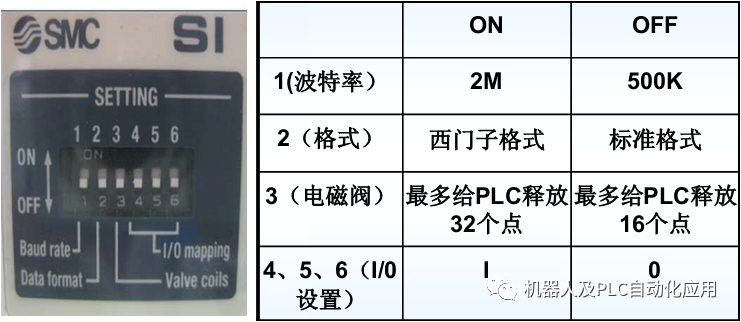
通过这个故障,我们来学习一下SMC的模块硬件机构.
多电源系统相互独立
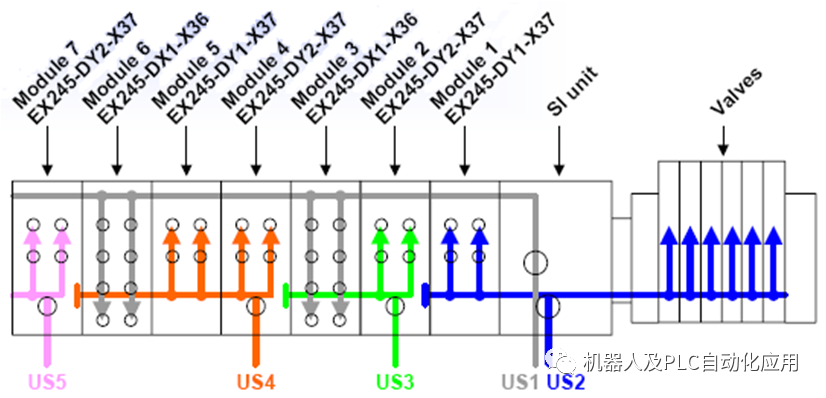


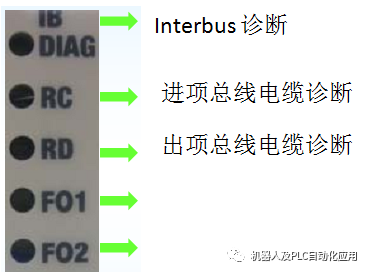
SF 系统故障-----------红色
BF 网络故障-------------红色
US1电源供给:电磁阀-----绿色
US2额外供应、载荷-------绿色
US3电源供给:传感器、输入模块-----绿色
INTERBUS模块的报警提示
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31634浏览量
224527 -
SMC
+关注
关注
2文章
92浏览量
21725 -
网络通讯
+关注
关注
0文章
78浏览量
12852
原文标题:刚刚处理了一个机器人带抓手上SMC的连续故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
复合机器人:移动 + 操作一体化,实现柔性生产的关键抓手!
、高适配、高协同的核心能力,成为实现柔性生产的关键抓手。复合机器人:柔性生产的核心智能载体复合机器人集成自主移动底盘、协作机械臂、3D视觉感知、一体化控制系统,打

基于米尔RK3576核心板的国产割草机器人解决方案
割草机器人提供了一颗真正的“中国芯”。该方案不仅实现了厘米级定位与毫秒级避障,更在数据安全与供应链韧性上提供了坚实保障,助力中国智造在庭院机器人赛道上实现弯道超车。
一、硬件核心:国产
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外
发表于 04-17 17:27
泰克科技怎么解决人形机器人真正的测试难点
刚刚结束的焉知机器人大会,再次把人形机器人推到了聚光灯下。从整机厂、核心零部件企业,到感知、控制、执行与电源相关的上下游玩家,几乎所有讨论都在传递同一个信号:人形
Neway电机方案在机器人技术方面的优势
系统稳定性背景:工业机器人需长时间连续运行,电源故障可能导致机械臂失控、生产线停机等严重后果。Neway方案:具备过压、过流、短路三重保护功能,提供OCP(过流保护)、OTP(过温保护)信号输出,支持
发表于 03-30 09:39
人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制
,有一个关键问题常常被忽略:机器人如何精准地“动起来”?这背后的核心技术就是机器人运动学(RobotKinematics)控制。在机器人系统

小型自重构机器人能不能帮忙做一个?
当然可以!我直接**给你一套能做、能跑、能自己变形的小型自重构机器人完整方案**,适合 ESP32S3 + 舵机 + 简单结构,不用复杂加工,能跑、能拼接、能变形。
我给你做**最容易实现、成本
发表于 02-21 19:24
探索RISC-V在机器人领域的潜力
应用,特别是机器人操作系统领域的可行性。MUSE Pi Pro以其强大的K1 AI CPU和官方对主流开源软件栈的积极适配,成为了一个非常有吸引力的选择。
二、 硬件初窥:性能小钢炮
MUSE Pi Pro
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
更多"、"互动更流畅"是开发者面临的核心挑战。传统的单一屏幕和有限的视觉输入已成为提升机器人智能化水平的瓶颈。而瑞芯微RK3576高性能处理器的出现
发表于 10-29 16:41
小萝卜机器人的故事
代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
自掏腰包救萝卜
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
模拟输入数据自动调整整个系统的动态平衡,使得机器人最终能够快速且平滑地沿着黑线移动。除此之外,该项目最大的亮点是我根据GD32VF103处理器的库函数手册等相关资料为RV-STAR开发板封装了一
发表于 10-20 10:39
什么是机器人?追溯机器人技术的演变和未来
的定义。机器人的定义,真如表面看起来那么简单直白?还是比我们所认为的更为复杂呢? 从本质上讲,机器人是一种可编程机器,能够感知、处理信息,并

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
故障率从 15% 降至 3% 以下。随着磁隧道结 (MTJ) 等新型技术成熟,下一代磁传感器有望实现纳米级精度、皮秒级响应速度,或使机器人 “高速竞速” 最高速度提升 40%;柔性磁传感器研发也将让
发表于 08-26 10:02
工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等
发表于 07-26 11:22
明远智睿SSD2351开发板:语音机器人领域的变革力量
连续的长句语音识别,还是复杂口音的处理,都能快速响应,保证语音机器人与用户之间流畅的对话体验。 其丰富的接口为语音机器人的功能拓展提供了可能。USB接口可以连接高灵敏度的麦克风阵列,实
发表于 05-28 11:36



评论