 库卡机器人编程之程序库
库卡机器人编程之程序库

一.结构化编程
采用结构化编程,可以通过严密的分段结构来解决复杂的问题,使复杂的任务得以分解成若干个简单的分步任务,降低编程时的总耗时,使相同功能的组成部分能在一个或多个项目中多次调用,结构化编程还可以使得程序可读性较好。
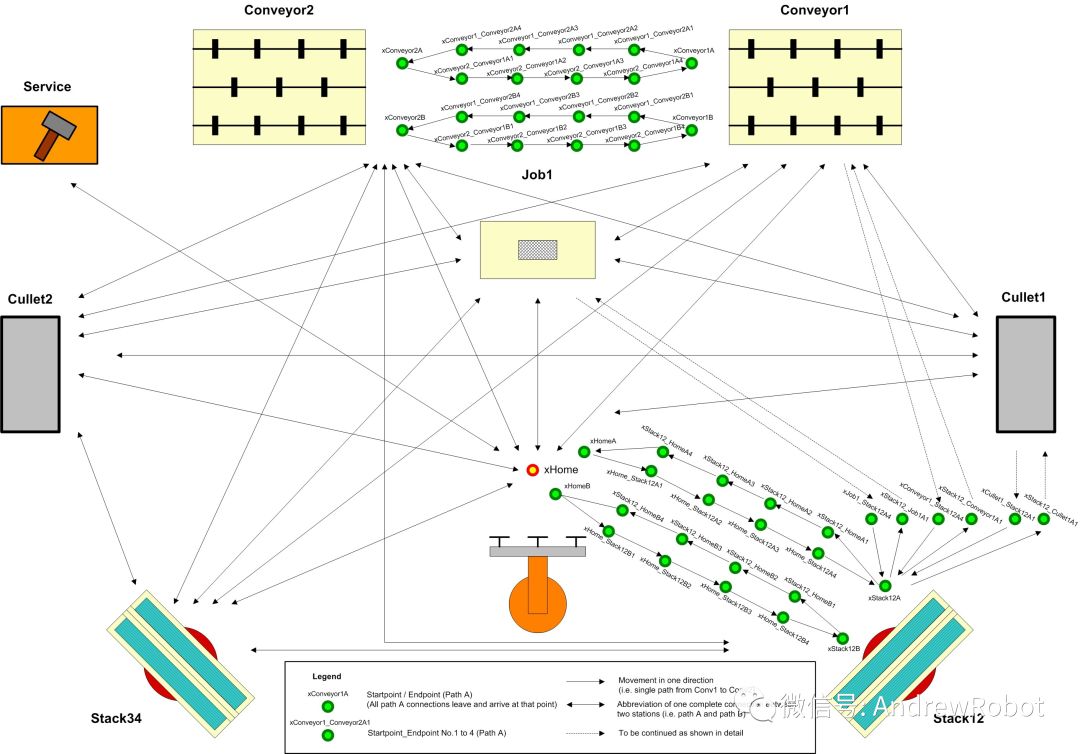
对于结构化编程,编程者需要在编程前做好规划并整理文档及流程图。在编程中使用备注或文件夹功能时程序通读明了,也方便后期维护以及程序的交接。如路径规划:
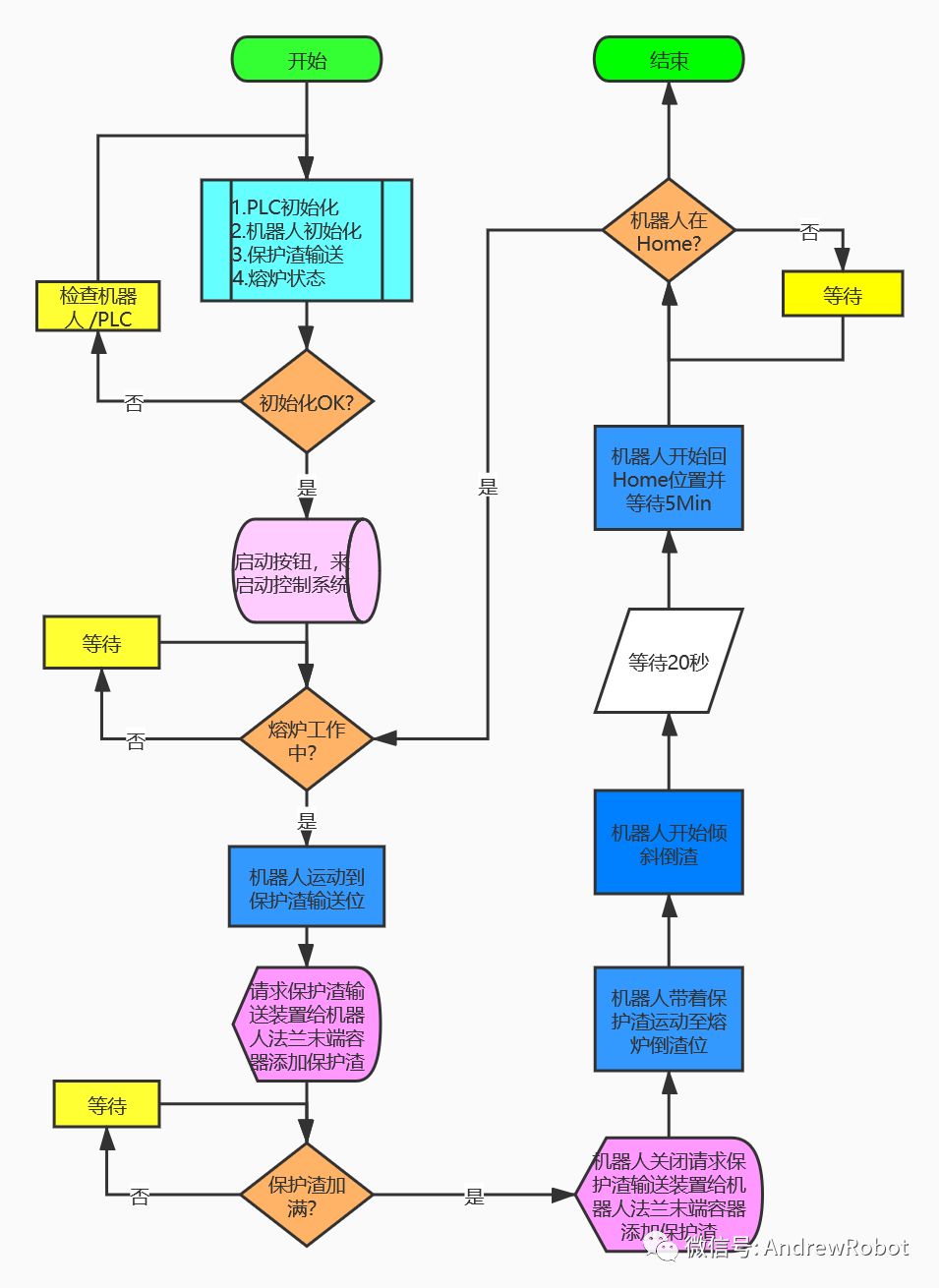
流程图:
规划文档:
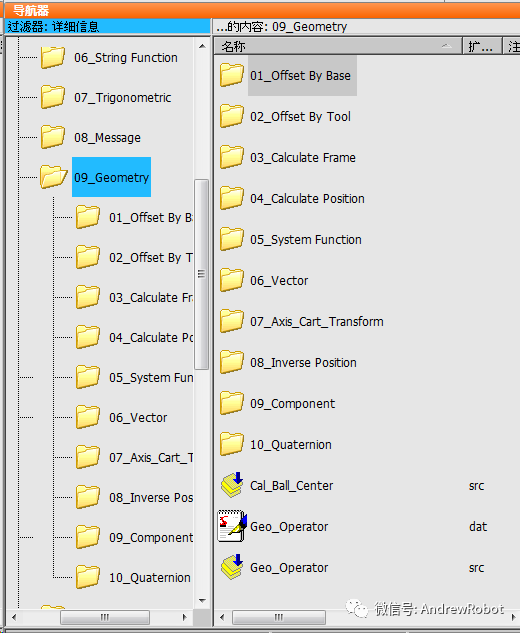
二.程序库 基于平时的积累以及项目,每个公司或每个编程人员应该自己拥有一个编程标准,其中不乏通用的子程序或者功能程序,如我个人的程序库,涉及功能,数据处理,运算等:库列表:
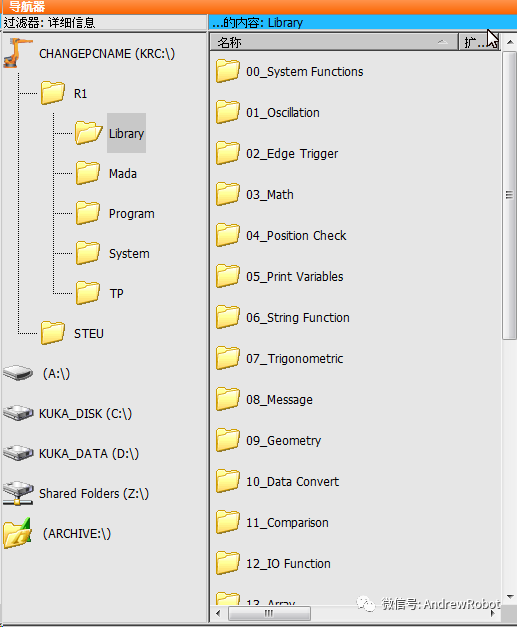
几何库:
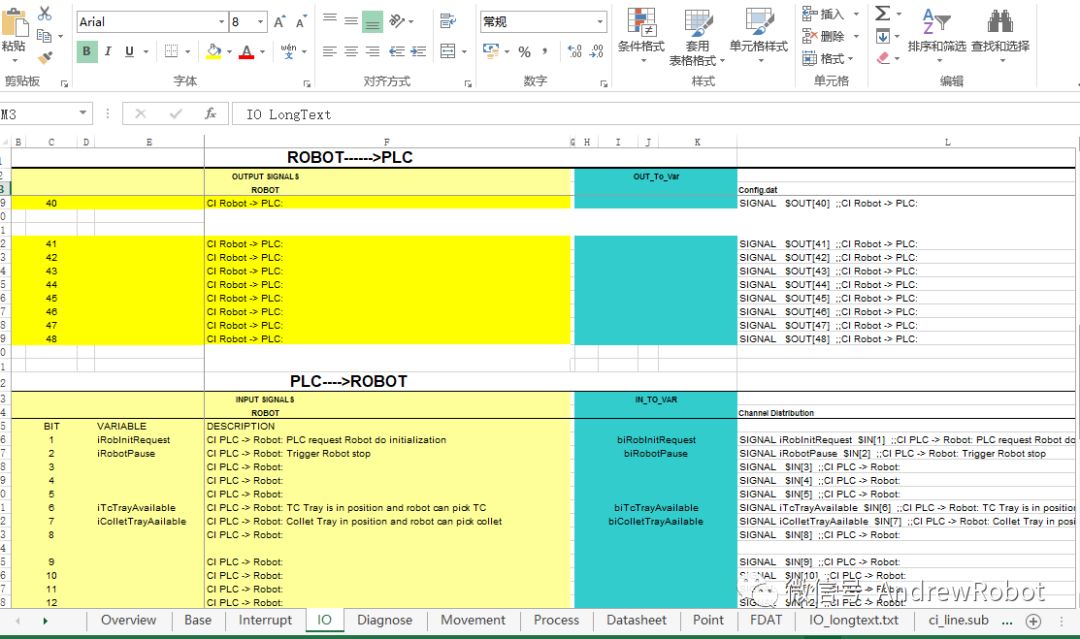
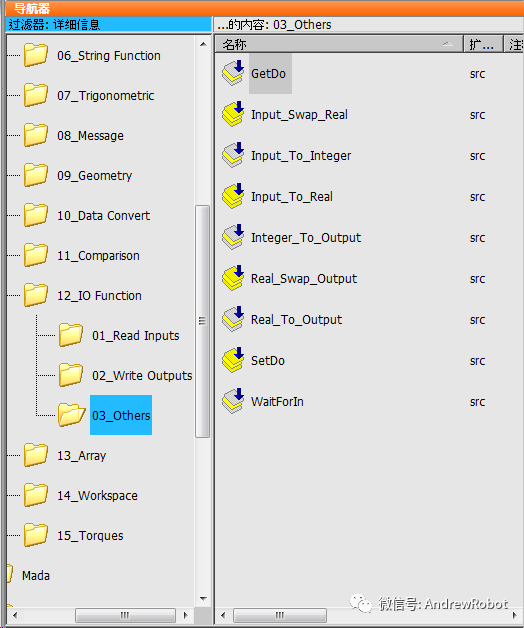
输入输出功能:
依托这些库,当我想与外部PLC进行数据交换时,就可以使用其中的库来实现,方便自己,节省编程时间。例如:
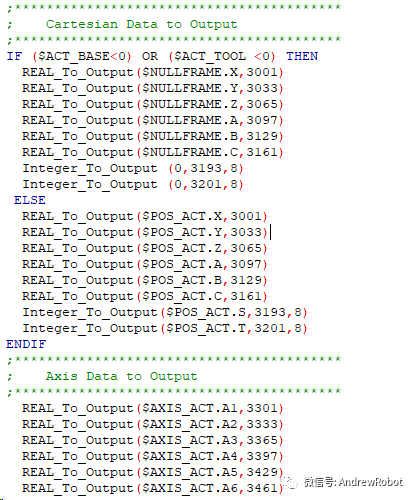
比如,通过3001-3032通道将当前位置的X浮点值发给PLC,并通过从3193开始的长度为8的通道将当前位置的状态整形值发给PLC。 三.结语
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31800浏览量
224991 -
编程
+关注
关注
90文章
3738浏览量
97639 -
数据处理
+关注
关注
0文章
657浏览量
30137
原文标题:库卡机器人编程之程序库
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人超声波避障测距
检测原理、输出逻辑、安装结构、运行稳定性上对标进口型号,可实现原位直接替换,无需修改设备结构、电路设计和主控程序,降低了厂商替换成本与改模风险。
在实际机器人应用表现上,RLC2247具备极佳的探测
发表于 06-10 17:20
江智康养机器人
江智康养机器人国内外市场合作模式与26年主要推进计划
1背景:
江智康养机器人自2016年至今市场订单方式深耕10年,已开发了10款以上机器人(其中3款桌面其余地面款),实际应用于养老产业开发
发表于 06-06 09:20
从运动控制到手眼协同,JetAuto Pro实现全栈ROS机器人开发平台
的过程变得轻松而有趣。第一步:搭建你的AI机器人JetAutoPro无需进行复杂的选型和集成步骤,真正做到开箱即用。它自带完整的软件环境和程序库,只需按照指引完成基

疆鸿智能Ethernet/IP转DeviceNet,库卡机器人智联枢纽,破壁协同高效智造
疆鸿智能Ethernet/IP转DeviceNet,库卡机器人智联枢纽,破壁协同高效智造 在注塑厂生产流水线上,设备协议不通常常成为自动化升级的瓶颈。当罗克韦尔Ethernet/IP PLC作为

Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南
Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南。 本文以西门子Profinet主站→Profinet从站转Ethernet IP主站网关→库卡机器人(Et

疆鸿智能DEVICENET转PROFIBUS网关:让库卡机器人与西门子PLC“同声传译”
疆鸿智能DEVICENET转PROFIBUS网关:让库卡机器人与西门子PLC“同声传译” 去年夏天,一家为某德系品牌做配套的汽车零部件工厂。车间里,十几台库卡机器人正在给车门内板涂胶,

库卡机器人焊接线改造:疆鸿智能PROFINET转DeviceNet网关立奇功
库卡机器人焊接线改造:疆鸿智能PROFINET转DeviceNet网关立奇功 去年在参与一条车门焊接线的改造时,我们遇到一个头疼的问题:甲方新增的六台高精度焊接机械臂是DeviceNet接口,而产线

疆鸿智能EtherCAT牵手DeviceNet库卡机器人:汽车玻璃产线的无界对话
疆鸿智能EtherCAT牵手DeviceNet库卡机器人:汽车玻璃产线的无界对话 在近期某汽车玻璃制造工厂的升级项目中,我面临一个典型的异构网络对接需求:现场需新增多台库卡焊接机器人

伟立机器人入选省未来产业“四库”
载誉前行 伟立机器人入选省未来产业“四库” 前言 近日,浙江省经济和信息化厅正式公布第二批未来产业“四库”培育名单,宁波伟立机器人科技股份有限公司成功入选,被列为省级未
AGV机器人如何精准识别库位有无货物?
AGV机器人如何精准判断库位状态?激光传感器、视觉识别和压力传感器三大技术协同作战:激光测距穿透空库位,视觉捕捉货物特征,压力感知重量变化,多技术融合让AGV在复杂环境中拥有"火眼金睛"。
基于NVIDIA Isaac库开发的机器人调酒师ADAM亮相国际赛场
基于 NVIDIA Isaac 库开发的机器人调酒师 ADAM,为维加斯黄金骑士队的冰球粉丝带来了身临其境的未来式服务体验。
西门子S7-1200 PLC通过Profinet转DeviceNet网关与库卡机器人高效通讯实战解析
在化学原料制造现场,核心控制设备为西门子 1200PLC,需实现对库卡 KR 6 R900 六轴机器人的实时控制与数据采集。该机器人采用 Devicenet 协议进行设备间通信,主要用于化学原料的自动配料、搬运及反应釜投料等工序
工业机器人的特点
生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人
发表于 07-26 11:22

库卡机器人与汇川PLC通讯——EtherNet/IP转 EtherCAT
在某高度集成化的自动化生产线上,负责精密物料搬运、复杂部件装配的库卡机械臂采用Ethernet协议进行数据交互,而新引入的汇川PLC作为生产线的中央控制枢纽,基于EtherCAT协议运行。由于两种



评论