 智能汽车能否识别和绕开物体
智能汽车能否识别和绕开物体

自动驾驶能否识别障碍物的能力与环境感知同等重要,如何安全有效的规划行驶路线,是自动驾驶汽车需解决的最大的难题之一。事实上,路径规划技术,现阶段是一个非常活跃的研究领域。路径规划之所以如此复杂,是因为其涵盖了自动驾驶的所有技术领域,从最基础的制动器,到感知周围环境的传感器,再到定位及预测模型等等。准确的路径规划,要求汽车要理解我们所处的位置以及周边的物体(其他车辆、行人、动物等)会在接下来的几秒钟内采取什么样的行为。
首先来说一下三个名词:路径规划、避障规划、轨迹规划
路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。
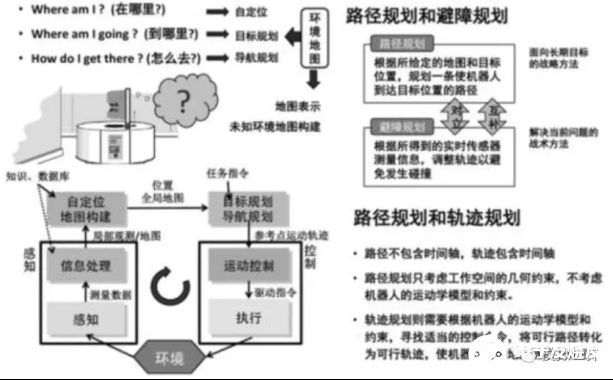
避障规划又叫局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。 主要是探测障碍物,并对障碍物的移动轨迹跟踪( Moving Object Detection and Tracking ,一般缩写为MODAT)做出下一步可能位置的推算,最终绘制出一幅包含现存碰撞风险和潜在碰撞风险的障碍物地图,这个潜在的风险提示是100毫秒级,未来需要进一步提高,这对传感器、算法的效率和处理器的运算能力都是极大的挑战,避障规划不仅考虑空间还考虑时间序列,在复杂的市区运算量惊人,可能超过30TFLOPS,这是无人车难度最高的环节。未来还要加入V2X地图,避障规划会更复杂,加入V2X地图,基本可确保无人车不会发生任何形式的主动碰撞。
轨迹规划则源自机器人研究,通常是说机械臂的路径规划。 在无人车领域,轨迹规划的定义感觉不统一。有人将避障规划与轨迹规划混淆了。轨迹规划应该是在路径规划和避障规划的基础上,考虑时间序列和车辆动力学对车辆运行轨迹的规划,主要是车纵向加速度和车横向角速度的设定。将设定交给执行系统,转向、油门、刹车。如果有主动悬挂,那么轨迹规划可能还要考虑地形因素。
三大规划是无人车最复杂的部分,算法多不胜数,让人眼花缭乱,这也是百度、谷歌和苹果科技巨头要切入无人车领域的主要原因,这些科技巨头最擅长的就是算法的优化整合。当然传统车厂如福特和丰田,拥有对车辆动力学的绝对优势,在此领域实力并不比科技巨头要差,尤其是丰田,从开源 SLAM到KITTI,软件实力丝毫不次于谷歌。
对于全局型路径规划不算复杂,前提是有拓扑级地图,这对地图厂家来说很容易的。对于非地图厂家是有点麻烦的,不过只能算小麻烦。
今天我们重点了解一下避障规划,避障规划的前提是对周围环境有深刻的理解,有一个非常完善实时的环境理解。
在此之前不得不先要理解无人驾驶避障的含义,很明显我们根据无人驾驶避障的过程,可以将无人驾驶避障分成三个方面:
1.运动障碍物检测:对运动过程中环境中的运动障碍物进行检测,主要由车载环境感知系统完成。
2.运动障碍物碰撞轨迹预测:对运动过程中可能遇到的障碍物进行可能性评级与预测,判断与无人驾驶车辆的碰撞关系。(当你检测到障碍物后,你就得让机器判断是否会与汽车相撞)
3.运动障碍物避障:通过智能决策和路径规划,使无人驾驶车辆安全避障,由车辆路径决策系统执行。(判断了可能会与汽车发生碰撞的障碍物后,你就得去让机器做出决策来避障了)
运动障碍物检测方法
运动障碍物检测根据他们的sensor主要分成两类:
一种是基于激光雷达和毫米波雷达的
一种是基于立体视觉的
运动障碍物碰撞轨迹预测
这一部分与障碍物的检测识别分不开的。无人车的感知系统需要实时识别和追踪多个运动目标(Multi-ObjectTracking,MOT),例如车辆和行人。
物体识别是计算机视觉的核心问题之一,最近几年由于深度学习的革命性发展,计算机视觉领域大量使用CNN,物体识别的准确率和速度得到了很大提升,但总的来说物体识别算法的输出一般是有噪音的:物体的识别有可能不稳定,物体可能被遮挡,可能有短暂误识别等。自然地,MOT问题中流行的Tracking-by-detection方法就要解决这样一个难点:如何基于有噪音的识别结果获得鲁棒的物体运动轨迹。
运动障碍物的避障本质上它是一个路径规划的过程:在路段上有未知障碍物的情况下,按照一定的评价标准,寻找一条从起始状态到目标状态的无碰撞路径。
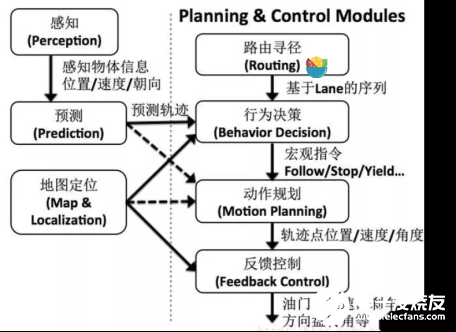
预测
预测模块的作用是对感知所探测到的物体进行行为预测,并且将预测的结果具体化为时间空间维度的轨迹传递给下游模块:行为决策模块。然后行为决策模块结合路由寻径模块从而进行行为决策。
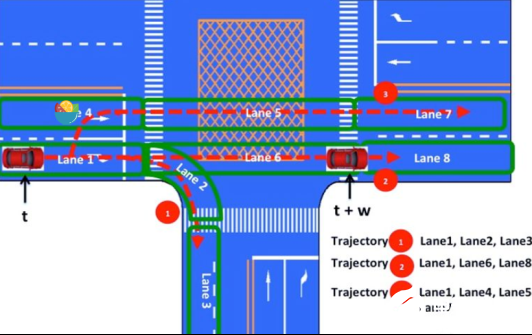
这些选择就是结合高精地图的全局规划,然后再通过汽车周边传感器感知的信息进行局部规划,从而判断汽车是否右转、直行or并道。
-
智能汽车
+关注
关注
30文章
3231浏览量
109151 -
自动驾驶
+关注
关注
791文章
14672浏览量
176621
发布评论请先 登录
“汽车智能化” 和 “家电高端化”
自动驾驶汽车如何准确识别小物体?

【上海晶珩睿莓1开发板试用体验】物体识别的板端推理
在树莓派5上使用YOLO进行物体和动物识别-入门指南

【正点原子STM32MP257开发板试用】基于 YOLO 模型的物体识别
【正点原子STM32MP257开发板试用】基于 MobileNet 的物体识别
新唐科技M55M1 MCU在药品识别上的应用

请问训练平台训练完的识别程序,可以实现在识别到物体时屏幕再显示出来,没有识别到物体时屏幕不显示吗?
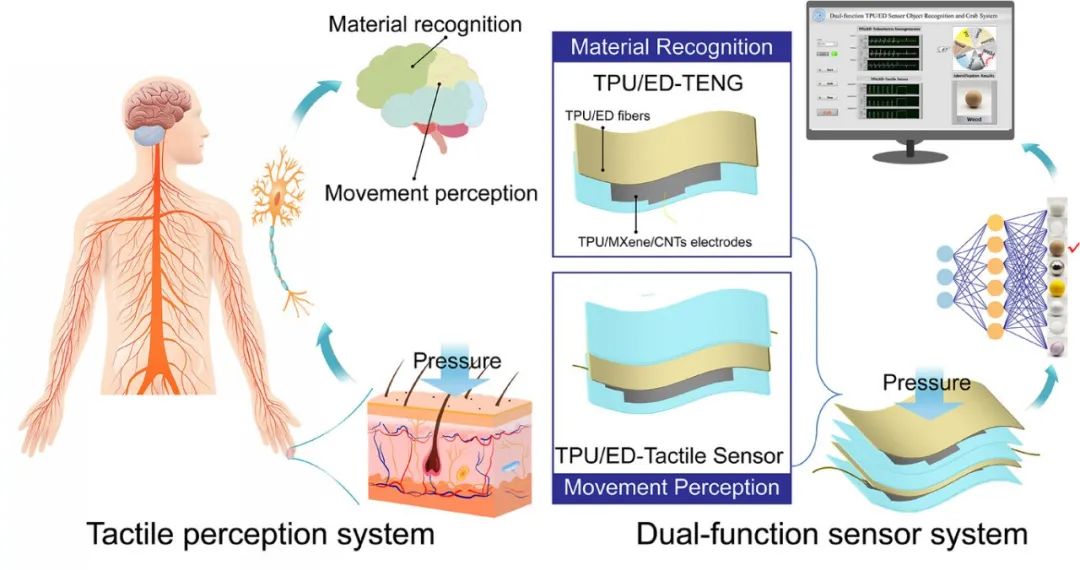
研究基于多功能离子纤维传感器系统的物体识别和抓取的人工触觉感知
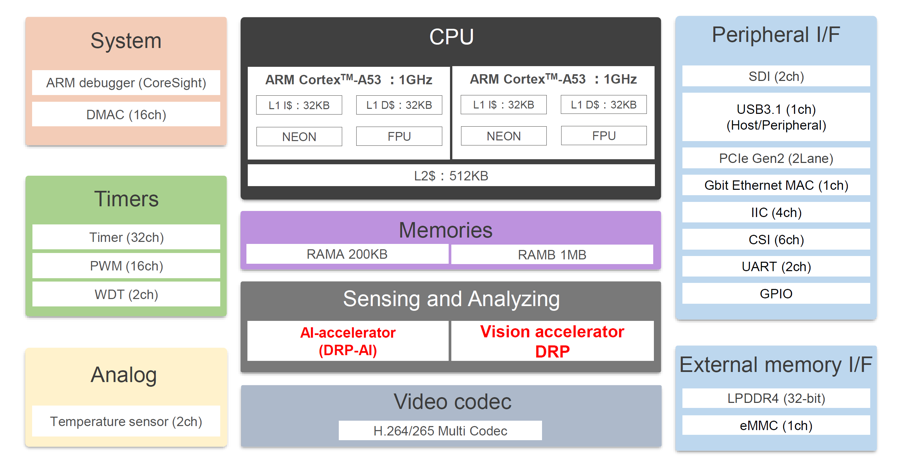
支持实时物体识别的视觉人工智能微处理器RZ/V2MA数据手册
热释电红外传感器探测物体的工作原理及适应性应用

紧凑型相机能以光速识别物体
红外感应技术的工作原理
深视智能3D相机在异形汽车密封胶条的截面轮廓测量中的高速应用
什么是YOLO?RK3568+YOLOv5是如何实现物体识别的?一起来了解一下!






 工商网监
工商网监
评论