 研究人员提出了一个名为CommPlan的框架
研究人员提出了一个名为CommPlan的框架

在一项新的研究中,麻省理工学院计算机科学与人工智能实验室的研究人员提出了一个名为CommPlan的框架,该框架为机器人提供了与人类遵循“良好礼节”原则的功能,并将其留给机器人做出使他们有效完成任务的决策。他们声称这是手工制定规则的一种出色方法,因为它使机器人能够对其决策进行成本效益分析,而不必遵循特定于任务和上下文的策略。
CommPlan权衡一系列因素,包括一个人是否忙还是可能对给定的过去行为做出响应,利用一个专用模块-Agent Markov模型-来代表该人的顺序决策行为。它由模型规范过程和执行时部分可观察的马尔可夫决策过程(POMDP)计划程序组成,该计划程序是作为机器人的决策模型而衍生的,CommPlan结合使用该模型来得出机器人的动作和通信策略。
使用CommPlan,开发人员首先使用数据,领域专业知识和学习算法指定五个模块-任务模型,通信功能,通信成本模型,人员响应模型和人员可选动作模型。通过对所有模块的分析组合,得出决策模型,并且在任务执行期间,机器人使用硬件传感器,决策模型和POMDP求解器来计算其策略。最后,使用机器人的执行器和通讯方式执行策略。
为了评估CommPlan,研究人员进行了一项实验,其中涉及带有Robotiq抓手的Universal Robot 10和15名人类参与者,他们的任务是在厨房中做饭。机器人必须在0.3秒的规划时间内对一个较大的状态空间进行推理,并确定(1)接下来应装满四个杯子中的哪个杯子;(2)是否等待以确保安全或移动完成任务,(3 )如果它选择移动,其轨迹到达杯子,(4)是否使用其通信方式;(5)要传达的通信消息。
该团队报告说,该机器人成功地与人类合作完成了诸如组装配料,包裹三明治和倒汁等任务。重要的是,与基线手工制定和无通信的静默策略相比,它这样做更加安全有效。
论文的共同作者和麻省理工学院的研究生沉力说:“许多手工制定的政策有点像是一个同事一直在困扰着你,而不是Slack,或者是一个微观管理的老板反复问你取得了多少进展。” “如果您是紧急情况下的第一响应者,那么与同事的过多沟通可能会分散您的主要任务。”
-
传感器
+关注
关注
2577文章
55485浏览量
793867 -
机器人
+关注
关注
213文章
31434浏览量
223614 -
人工智能
+关注
关注
1820文章
50315浏览量
266893
发布评论请先 登录
BlueMatrix与Perplexity达成合作,为机构研究带来AI驱动的发现能力
摩尔线程新一代大语言模型对齐框架URPO入选AAAI 2026

研究人员复兴针孔相机技术以推动下一代红外成像发展
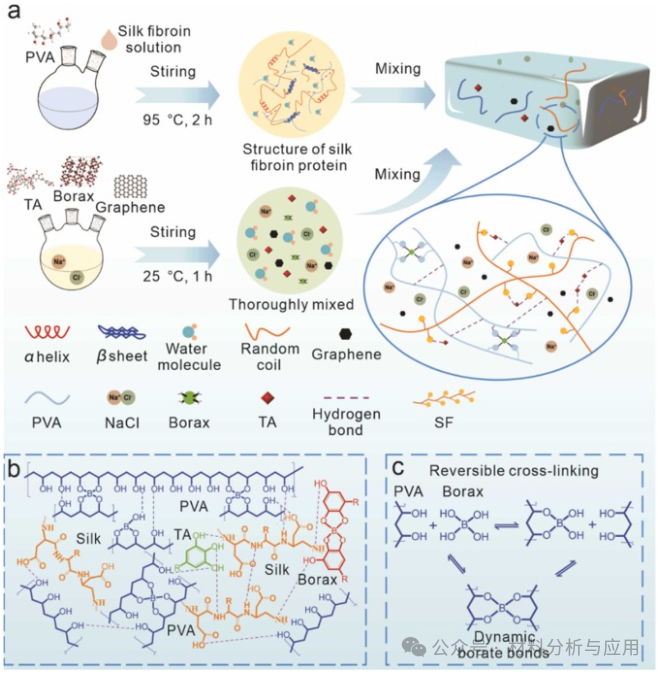
安徽大学:基于聚乙烯醇/丝素蛋白/石墨烯水凝胶的柔性传感器,用于先进的可穿戴电子产品等
我国科研人员提出紧凑型太赫兹三光梳光源实现方案
一种适用于动态环境的自适应先验场景-对象SLAM框架




评论