 盘点AGV机器人的多种导航方式
盘点AGV机器人的多种导航方式

(文章来源:中国电气传动网)
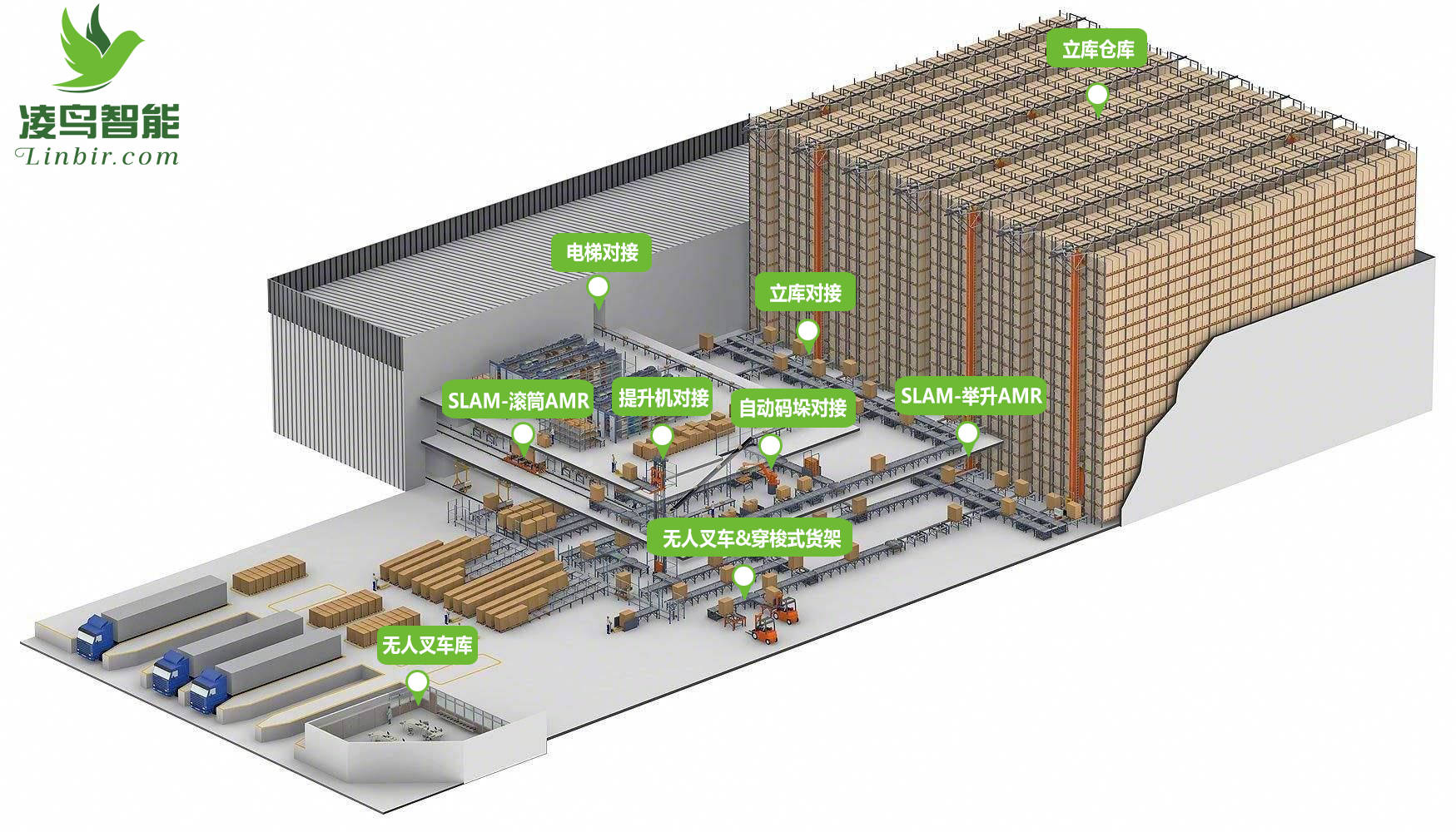
智能工厂是实现智能制造的先决条件,其中,作为自动化运输搬运的重要工具,无人搬运车,即AGV,被广泛部署。在实践中,AGV小车常用于物流仓储、港口码头、堆场等,在智能制造中如何使用,如何选择AGV产品,是所有制造商所关注的问题。作为AGV的核心技术之一是导航导引技术,那么,你知道AGV有多种导航方式?
AGV导航导引的关键技术,什么是AGV导航导引?指AGV根据路径偏移量来控制速度和转向角,保证AGV精确行驶到目标点的位置及航向的过程。主要三大技术要点:定位、环境感知与建模、路径规划。
磁钉导航,是通过磁导航传感器检测磁钉的磁信号确定路径,只是磁钉间的距离不能过大,且两磁钉间AGV处于一种距离计量的状态,并通过编码器计量所行走的距离。其次,磁钉导航所用控制模块与磁条导航控制模块相同。优点是成本低、技术成熟可靠,导航的隐秘性好、美观性强,磁钉抗干扰强,抗磨损性强,抗酸碱、油污等影响。缺点是对地面满足技术要求高,不能有其他磁性物质存在,不能有消磁、抗磁物质,否则影响AGV磁钉磁性,且导航线路铺设一次后,需修改线路才能执行二次作业,所以增加成本和施工时间。同时,也会对地面造成破坏。
磁条导航,该导航技术非常成熟,通过测量路径上的磁场信号,获取车辆自身相对于目标跟踪路径之间的位置偏差,实现车辆的控制、导航。具有高测量精度和重复性好,不易受光线变化等影响,在运行过程中,磁传感系统具有很高的可靠性和鲁棒性。且维护费用非常低,使用寿命长,增设、变更路径较容易。缺点是磁条易破损,易吸引金属物质,导致AGV设备故障等。
激光导航,在周围安装激光反射板,AGV行驶时通过发射激光束,确定其当前位置和方向,并通过连续的三角几何运算,实现AGV的导航。优点是AGV定位精确。缺点是成本高,对环境要求非常苛刻,如外界光线、地面、能见度等。目前,鉴于定位精度高、线路变更灵活、导航技术成熟等,激光导航技术已成为国内外AGV厂商主流方案。
电磁导航,该导航是传统导航方式之一,目前,仍被采用,把金属线设置在AGV的行驶路径上,并加载导引频率,以此识别AGV导航功能。与磁条导航类似,由于存在美性不足、路径变更困难等缺点,AGV厂商已逐渐放弃该技术方案,但在高温环境下、线路平直性要求严格等下,会采用该导航技术。优点是成本低、技术成熟可靠。缺点是需要额外设备产生电磁信号,需要其他传感器实现站点定位功能。
测距导航,对周围环境,激光扫描获取测量数据,结合导航算法,实现AGV导航。该导航传感器通常使用具有安全功能的安全激光扫描仪实现,同时,实现导航测量功能。采用测距导航技术的AGV可实现进入集装箱内部进行自动取货送货功能。
轮廓导航,目前,该导航是AGV最先进的导航技术,针对现场环境,利用二维激光扫描仪进行测量、学习,并绘制导航环境,实现轮廓导航。优点是不需要反射器或其它人工地标,降低安装成本,减少维护工作,激光导航替代方案。混合导航,根据现场环境变化,采用多种导航集合体,满足AGV连续运行。光学导航,该导航利用工业摄像机识别。该导航分为色带跟踪导航、二维码识别等功能。
二维码导引,AGV车载摄像头扫描解析离散铺设QR二维码,获取实时坐标。此种方式是目前市面上最常见的AGV导引方式,适用于环境较好的仓库。惯性导航,利用AGV上陀螺仪获取AGV三轴角速度和加速度,通过积分运算进行导航定位。优点是成本低,短时间内精度高。缺点是陀螺仪随时间增长,误差会累积增大,直到丢失位置。因此,惯性导航通常作为其他导航方式的辅助。
SLAM激光导航(自然导航),该方式是通过工作场景中的自然环境,如仓库中的柱子、墙面等作为定位参照物,实现定位导航。视觉导航,该方式是基于SLAM算法,通过车载视觉摄像头采集运行区域的图像信息,进行定位和导航。优势是高灵活性,适用范围广、成本低等。缺点是技术成熟度一般,利用车载视觉系统快速准确地实现路标识别这一技术仍处于瓶颈阶段。
磁带或电磁导航是早期AGV导航导引方式,具有方案原理简单、技术成熟,成本低优势,但改变或扩展路径及后期的维护比较麻烦,AGV无法实现智能避让,或通过控制系统实时更改任务。目前,二维码+惯导成为AGV主流的导航方式,使用相对灵活,容易铺设或改变路径,但路径需要定期维护,且场地复杂则要频繁的更换二维码,对陀螺仪的精度及使用寿命要求严格。
随SLAM算法的发展,将成为未来AGV主流的导航方式。鉴于SLAM方式无需其他定位设施,路径可灵活多变,适应多种现场环境。SLAM分为激光SLAM(2D或3D)和视觉SLAM两大类。更高柔性、更高精度、更强适应性是AGV导航导引技术发展方向,逐渐不依赖于辅助导航标志。未来,5G、AI、云计算、IoT等新技术与智能机器人融合,将给AGV行业带来翻天覆地的变化。
(责任编辑:fqj)
-
导航技术
+关注
关注
0文章
36浏览量
10079 -
agv机器人
+关注
关注
1文章
77浏览量
7041
发布评论请先 登录
为移动机器人量身定制的RK3588工控机,保障AGV与AMR稳定运行

【案例分享】电子谷多芯线束赋能高效产线!AGV 搬运机器人稳定连接方案

复合机器人对比传统AGV和机械臂的优势何在?

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
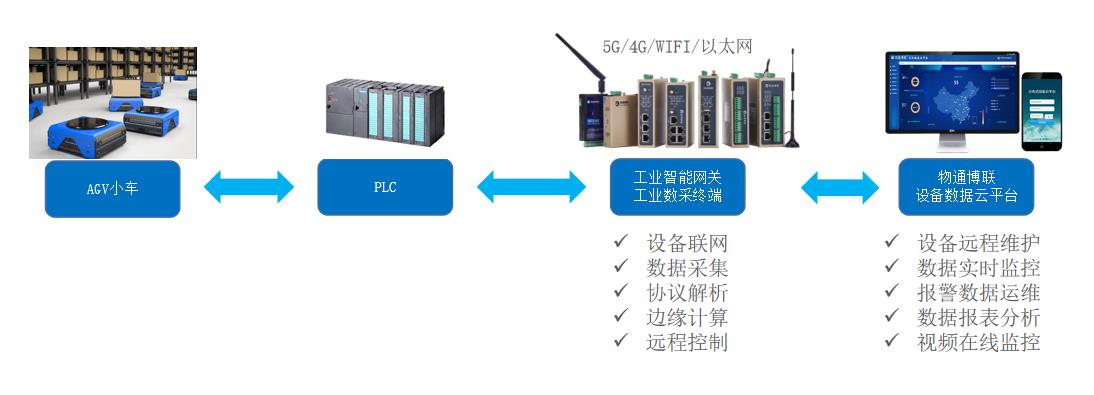
AGV搬运机器人联网监控系统方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
AGV机器人选型技术分析与应用策略
AGV无人叉车的功能包括什么?企业采购前必须了解的因素




评论