 多用途机器人DIY图解
多用途机器人DIY图解

步骤1:工具和材料:
ARDUINO迷你克隆或MultiWii多直升机飞行控制板
2x L298以获得更大的电动机功率
Sweep RC CAR TIRES”非常棘手”
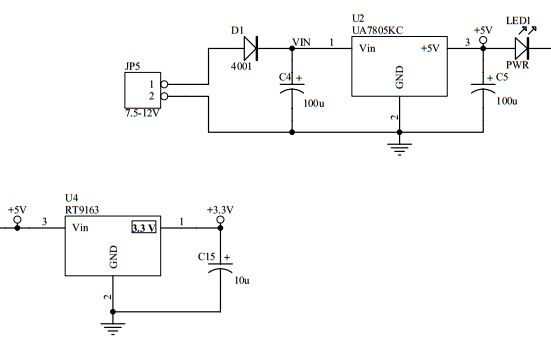
7805 5v稳压器
RT9163 3.3v稳压器
反射传感器
一千欧姆
10,000欧姆
5厘米标准插头
M3螺栓和螺母
铝制支架
用于6mm轴的TAMIYA轮毂
双面双玻璃纤维PCB
POLOLU 19:1减速电机
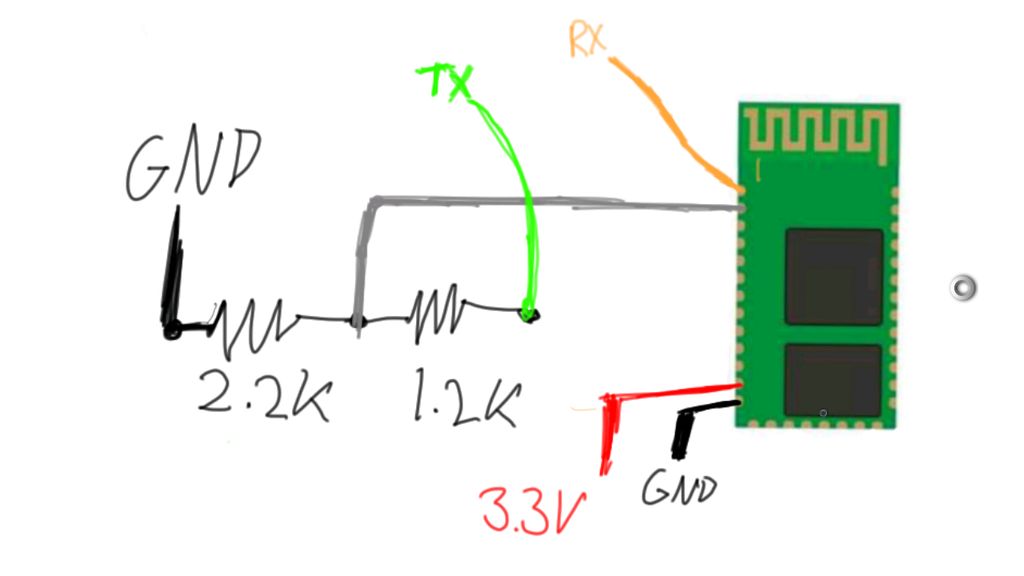
EGBT- 045MS“蓝牙模块”
第2步:设计机器人Pt1
我们首先从电动机开始,您将为机器人使用多少个电动机? 2WD 4WD TRACKED ?。在机器人世界中,由于齿轮箱会分配动力,因此一直使用齿轮电动机。为了简化制造多功能机器人的过程,您将需要一个平衡且可靠的电动机,该电动机具有足够的扭矩和速度。因此,我决定选择2WD配置的pololu 19:1变速箱,我知道2wd可能并不是真正的多功能,但是我现在拥有的就是所有这些,因此由您决定设计自己的小型4wd机器人或任何您可能会说的方便真正的多功能机器人。
提示〜
在我参加比赛的经验中,如果您想要精确的运动,您会希望使用速度较慢的电动机,因为速度较快的电动机会因为
比率字典:
扭矩 =提供高输出功率。 (例如,卡车在重载“一档”的山坡上行驶时需要大扭矩)
速度 = RPM等级,物体的运动速度(例如,打开在平坦的表面上,赛车需要很高的速度才能赶上“ 7档”)
在使用相同的电动机设置时,高扭矩齿轮箱的速度较低,而高速齿轮箱的扭矩较低。
第3步:电机安装
通过下载以下文件,您可以获得确切的信息安装座的尺寸就像在pololu上安装的那样,只是打印它,然后在打印输出上添加双面胶带,然后切出打印输出,然后在完成后将其粘贴在铝制支架上,现在就可以切割并钻出所需的孔供您安装电动机。此时,请花点时间来构建它,因为如果您想使机器人笔直移动,则应该正确地制作好电机支架。
或〜。..。如果您很懒,也许您住在美国只需向狡猾的人购买POLOLU或寻求帮助的电机支架:D
步骤4:紧凑型非PCB电机驱动器
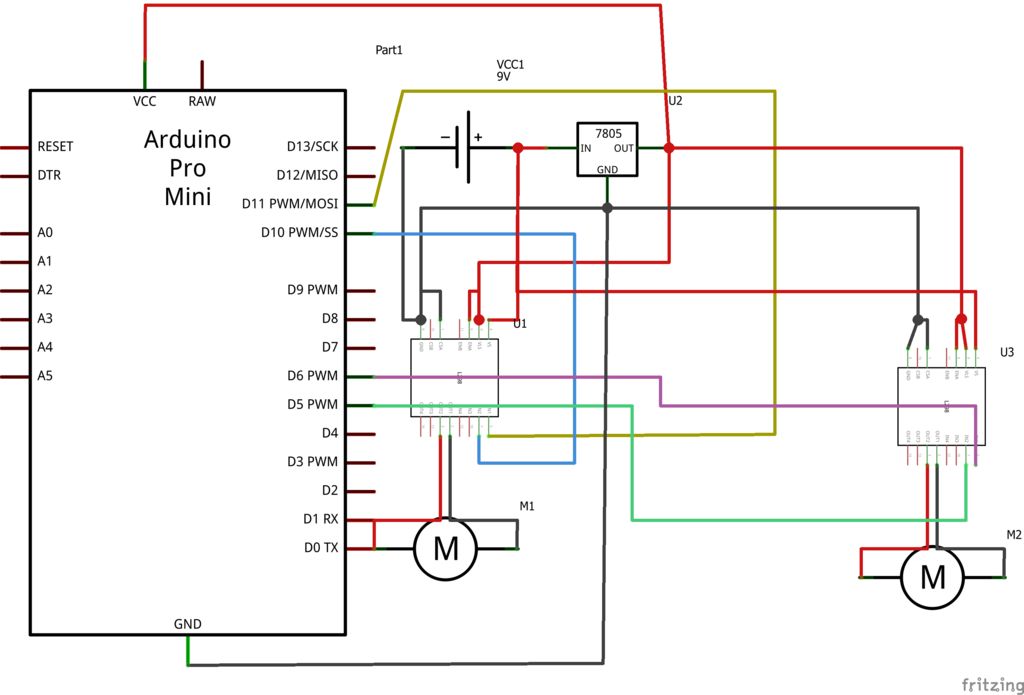
“使用Fritzing程序打开文件”并转到原理图以获得更好的视图
(将改用此步骤进行操作)为您轻松:D)
为什么要有2个l298?
我想要给我的机器人更多的动力,所以我给每个电机的整体额定电流为4A
而不是2A
IC的上部是接地的,所以可以在那里随意焊接
我知道当您将它们并联时会增加电流输出,但不会在“桥式驱动程序
中工作”步骤5:玻璃纤维玻璃机箱
为何选择玻璃纤维眼线 精简的PCB真是浪费钱!
是的,我在学校得到了很多,但是由于这是一个多功能的机器人,因此您可以在完成所需的操作时在机箱上添加PCB布局
记住要在机箱的背面留出空间,您可以在其中增加额外的孔来连接可扩展的机箱,从而为您的项目提供更多的空间
还有一件好事之所以这样,是因为玻璃纤维是碳纤维的替代品,这意味着它可以承受第二张照片的冲击,它是相扑机器人设计的15个版本,均获得了第一名和第二名,但从未获得冠军
步骤6:安装所有基本部件
底盘钻进将电动机安装座安装到底盘上所需的所有物品,这样做时,我建议将L298驱动器放在变速箱顶部。完成时准备车轮和HUBS。并按任何人都可以做的形状将其固定〜
再次完成后,准备支脚并制作原型PCB,完成后将所有支脚对准并钻出孔。拧紧所有东西,它看起来应该像没有组件的最后一张图片。..。..。我们现在要转到该部分
第7步:主板
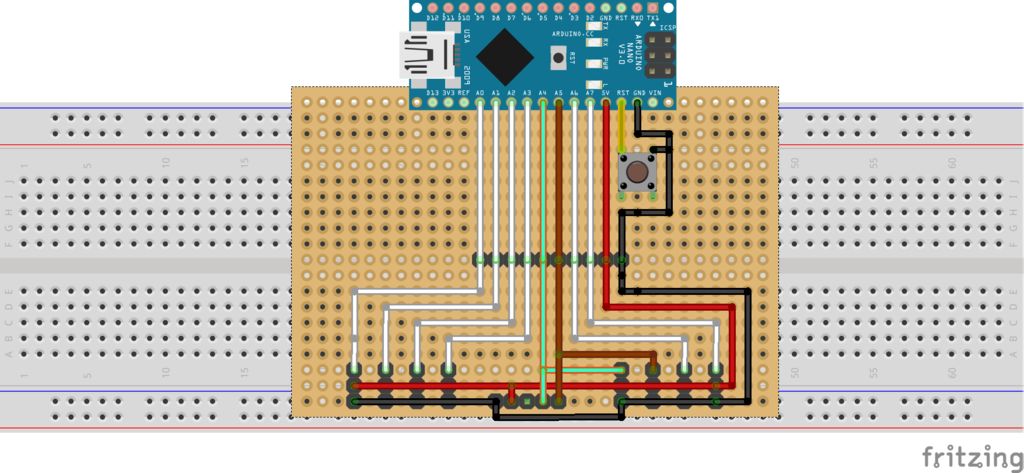
我这样做是为了进行真正的比赛,我强烈建议您使用Multiwii飞行控制器以获取更多信息,只需自己动手Google +此处的链接MULTIWII只需打开Fritzing文件,您就可以很好地随时询问我的问题
罗盘模块和陀螺仪等要记住的东西 analog 4是SDA 5是SCL,因为其I2C属性结合了所有这些模块的sda和scl引脚是可以的,因为这些模块的通信方式是通过其ID来表示,因此atmega 328可以通过以下方式识别该模块他们的ID是“根据我的兄弟”
步骤8:IR传感器阵列(行跟进)
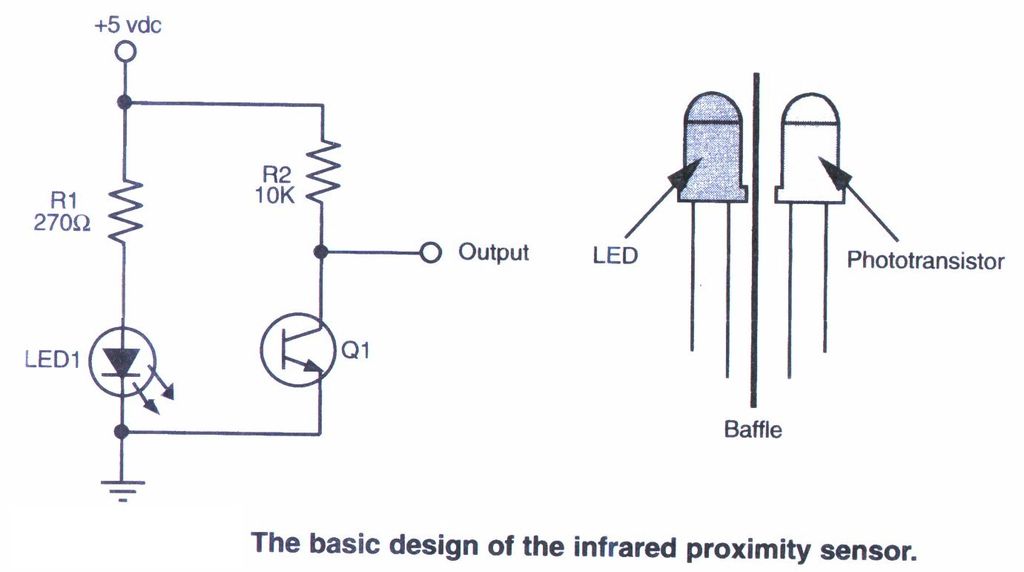
对于这一部分,您将需要ga 1K和10K电阻器时,您可以使用220代替1K,但同样,传感器也会过于敏感,尤其是在机器人周围的照明条件不同时,很难进行校准。
使用eagleCad编辑布局根据给定原理图的传感器阵列。如果您有任何改进传感器阵列的想法,请告诉我们您的想法,我将在等待中〜
并且要使机箱上的pcb观看此视频,或者您是否真的不能做一个标记
请记住为SUMOBOT CONFIGURATION制作2个以上的传感器,不要将传感器阵列用于sumobot,因为它不会对机器人的边缘做出快速反应,因为它的作用更多。在中心。
步骤9:SUMOBOT SCOOP
相扑机器人世界的重要组成部分
尖锐且倾斜的角度即使您的机器人看起来像垃圾场一样,铲刀/铲子也将始终使您获胜。请确保人们不会将其视为铲刀,因为出于安全原因使用锋利的铲子实际上是非法的
剪切并弯曲角钢,然后确定铲所需的角度。
切割将要安装在成角度的杆上的基板。
使用dremel切割切刀刀片,然后打磨/除去刀片上的油。以便我们可以使用热胶将其安装在基板上
步骤10:最终定型+编码
这时,您的工作机器人没有程序,但您可能会说机器人由于我的指导而丢失了某些东西,这是我第一次这样做,对不起
已完成且应完成的事情的摘要
收集所有零件
选择电动机
制造所需的电动机安装座,或只购买
制造或购买电动机驱动器
设计机箱并利用您拥有的资源进行安装
安装所有基本内容以获取机器人的真实图像
购买或制作主板
制作地面传感器阵列或单个
为sumobot创建所需的铲斗
将电池和SHARP传感器放置在是您想要的
对机器人进行编程以使其工作的方式
在我们的国家/地区竞争之后,将于3月12日发布机器人代码同时,在我的现实生活中的朋友ASCAS的允许下,您可以查看他的蓝牙代码来控制sumobot
第11步:旧机器人
我仍在寻找我2012-2013年的照片,我在这里的所有东西都来自我的手机,我会将其更新为为您提供更多想法
步骤12:FPV设置只是为了娱乐(SPYBOT)
您需要的东西
FPV摄像头,或者只要有一个,就使用GOPRO。 http://www.amazon.com/gp/product/B00HN5VT1E/ref=o 。..
和Boscam TS351 + RC805 5.8G FPV 200mW AV发射机TX 2KM,用于5.8GHz Rx接收器
http://www.amazon.com/gp/product/B00GGC60N2/ref=ox 。..
和一个小显示器:D
http://www.amazon.com/Camera-Monitor-Support-Rotat 。..
,对于您的机器人,tx rx取决于您:D
-
机器人
+关注
关注
213文章
31402浏览量
223560
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
探索AS8500:通用多用途数据采集系统的卓越性能
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
工业机器人与协作机器人概念不同




评论