 坦克机器人的制作教程
坦克机器人的制作教程

第1步:切割零件!
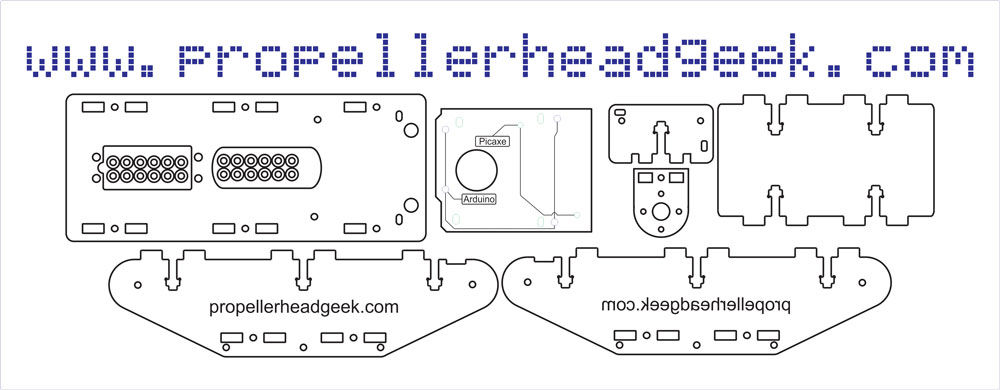
用于CNC的设置很容易适应于CNC。 Epilog螺旋-自底向上雕刻,300DPI;栅格= 57速度,100功率;向量= 8或9速度,100功率,5000频率。
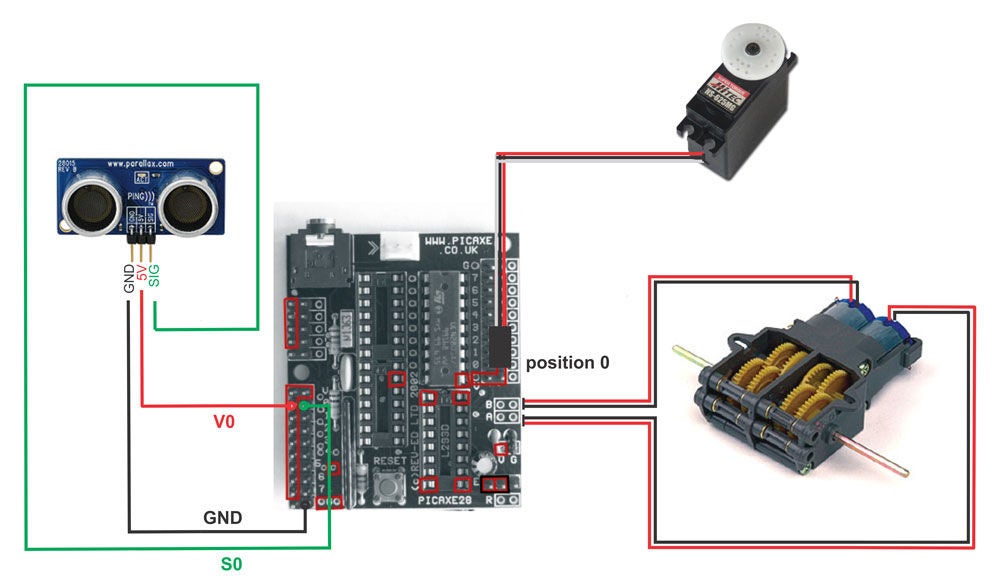
步骤2:接线图
第3步:组装您的工具和组件
和往常一样,不要割断手指或将热烙铁插入其中您的鼻子。..
您将需要:
从您,ponoko或您选择的类似的
qty 1微处理器(此处使用的picaxe)中购买1个激光切割零件
qty 1 p视差ping,SRF04,SRF05或IR测距仪(此指示中使用的ping)
qty 1 Tamiya 70097电动机/变速箱组合
qty 1 Tamiya 70100履带和车轮机械套件
qty 1标准或微型伺服器(推荐标准)
qty 3伺服扩展器(公对公),或用电线和母头自己动手 4.5“螺钉和螺母尺寸4-40(在五金店)
数量4-40(硬件商店)的数量为16 .75的螺钉和螺母
万用表和烙铁(如果您自己制作电线)
步骤4:组装测距桅杆
您需要测距桅杆的2个组件,2个垫片,2个.5 4-40螺钉和螺母,1个.75 4-40螺钉和螺母。
步骤5:顶层甲板/电子平台
您将需要2 .75 4-40螺丝+顶板螺母和2 .75 4-40螺丝+螺母和4个垫片,用于电子板+微控制器。
步骤6:侧面/Tamiya 70097电机变速箱/组装
您将需要Tamiya 70097 + 2面来创建此组装。
步骤7:完整框架/电子甲板/伺服器
您将需要先前的装配,以及此装配的顶部和下部甲板。使用数量为10 .75 4-40的螺钉+螺母完成此步骤。
您将需要数量为4 4-40的螺母将电子元件面板安装到主机架上。
您将需要数量为2 .5 4至40个螺钉+螺母来固定伺服器。 -同样,在安装顶板之前,请先安装伺服器。..
步骤8:轮杆/车轮/胎面/声纳桅杆
在这里无需多说。。不需要其他部分。所以。..
步骤9:
责任编辑:wv
-
机器人
+关注
关注
213文章
31431浏览量
223599 -
电动机
+关注
关注
75文章
4211浏览量
101772
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
工业机器人与协作机器人概念不同




评论