 如何使用555定时器IC指导直流电机的速度控制
如何使用555定时器IC指导直流电机的速度控制

第1步:快速了解直流电动机和速度控制
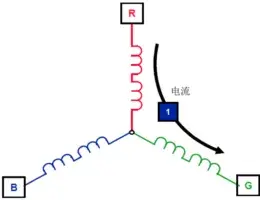
DC电动机是将电能转换为旋转机械能的设备。它是一种双引线设备,其旋转轴通过电磁感应旋转,旋转速度取决于所提供的电流或电压。通常,当您测量电动机两根导线之间的电阻时,它们是低电阻设备(大约5至20欧姆)。这是由于这样的事实,即电动机的内部结构由电磁线线圈组成,该电磁线线圈具有多达数千个绕组,就像复杂的电磁网一样。因此,您可能会认为,为其提供9V电源会导致流经电动机的电流非常大。但事实并非如此,因为它们不是电阻器之类的无源设备,并且不适用简单的欧姆。如果您想了解电动机中电压,电流和速度之间的确切关系,则可能需要查看以下参考资料以进一步阅读,尤其是当您也要了解特定部件并对其操作进行简单演示时。
实际意义上的电机
您可以这样看:您有一个两端子设备,可根据施加的DC电压或DC旋转当前。现在,旋转运动如何精确地取决于电压和电流?实际上,所提供的电压或电流的增加将导致每分钟转数的转速增加。可以说,在0伏或0安培时,电动机将停止旋转,并且逐点增加电压或电流量将逐渐增加电动机的旋转速度。但请始终记住,实际设备有局限性,您不能明显地将施加的电压/电流增加到无穷大,以使其具有非常大的超乎想象的旋转速度(还记得光速吗?)
如果选择购买直流电动机,可能会要求您提供额定电压。在某些情况下,您可以从标签上读取一些参数,例如额定电压和额定速度。从我的一门电子学课程中学到的是,如果给定了电压和速度额定值,那仅意味着如果向电动机提供的电压等于其额定电压,电动机将以该额定速度旋转。知道其额定电压也会告诉您一些允许的电压范围,以免损坏电机。如Paul Scherz在他的书[1]中所述,额定电压还告诉您电动机在什么电压下最有效地运行。您可以为电动机提供低于其额定电压的电压,电动机旋转只会更慢。如果直流电动机的额定电压为9V,则可以为其提供1V直流电源或电池,并且在某些情况下,电动机的旋转速度非常慢,而在某些情况下,电动机将停止旋转。如果手边有直流电动机,则可以检查引起旋转所需的最小电源电压是多少。必须提供高于额定电压的电压。此时,随着您进一步增加供应,电动机可能开始变热,并且继续向前继续将导致世界末日。
空载和空载情况
基本上,当我们谈论带负载的直流电动机时,这就是我们实际使用它的时候。但是这些简单的词就足够了。这意味着电动机现在是使加载的机械装置起作用的电动机。您可以将其用于遥控车,发电机,电风扇(安装风扇叶片时)等。将负载连接到电动机的主要含义是,它会阻碍电动机轴的旋转,主要是因为它是增加的重量,并且需要额外的扭矩才能旋转它。从某种意义上说,它会产生摩擦,从而减慢旋转速度。电动机然后趋于在空载条件下保持其最初的转速。为此,在给定的恒定电源电压下,它消耗的电流约为初始空载电流的一百倍甚至一千倍。在此项目中,电动机处于空载状态,因为我们仅根据PWM信号查看速度参数。另外,我们希望在以后测试电路时将功耗降至最低。
速度控制方法
要控制电动机的速度,我们必须控制某些直接影响其速度的电气参数。显然,我们必须调节提供给它的电压和电流。
一种方法是,在恒定电源电压下,您可能希望将可变电阻器(电位计)与电动机串联以调节/限制它在操作期间消耗的电流。这种方法的坏处在于,通过限制电流会改变串联电阻的值,这也会改变电动机两端的电压。电动机加载后,会吸收大量电流,从而增加了串联电阻上的功率。电阻上的功率将被转换成浪费的热量。
另一种方法是使用共发射极bjt晶体管配置并以电动机为负载,通过改变电源电压来调节通过电动机的电流转接器的基极-发射极结。但是,由于晶体管的Vbe与Ic之间的关系呈指数关系,因此很难预测。除了必须牢记的其他晶体管概念外,晶体管本身还会以热量的形式散发额外的功率。
另一种可能也是速度控制方法中最受欢迎的方法是脉冲宽度调制。此方法会在每个状态上以确定的时间间隔和从整体上定义的恒定频率生成从开(高)和关(低)切换的电压或电流脉冲信号。请注意,从电动机看,这种电压信号仍看起来像恒定的直流电压。如果为DC电动机提供9V电源和一个开关,但在开和关之间不断按下开关,则会降低电动机看到的平均电压,从而降低其速度。
有关详细讨论关于PWM,我们现在继续下一步。
参考文献:
[1] Paul Scherz(2000),第13章,实用的发明家电子学。
[2]第22章,查尔斯·普拉特(Charles Platt)撰写的《电子元件百科全书》第1卷(2013)
[3] https://www.youtube.com/watch?v= LAtPHANEfQo
[4] http://www.electrical4u.com/working-or-operating -。..
步骤2:有关脉冲宽度调制的更多信息
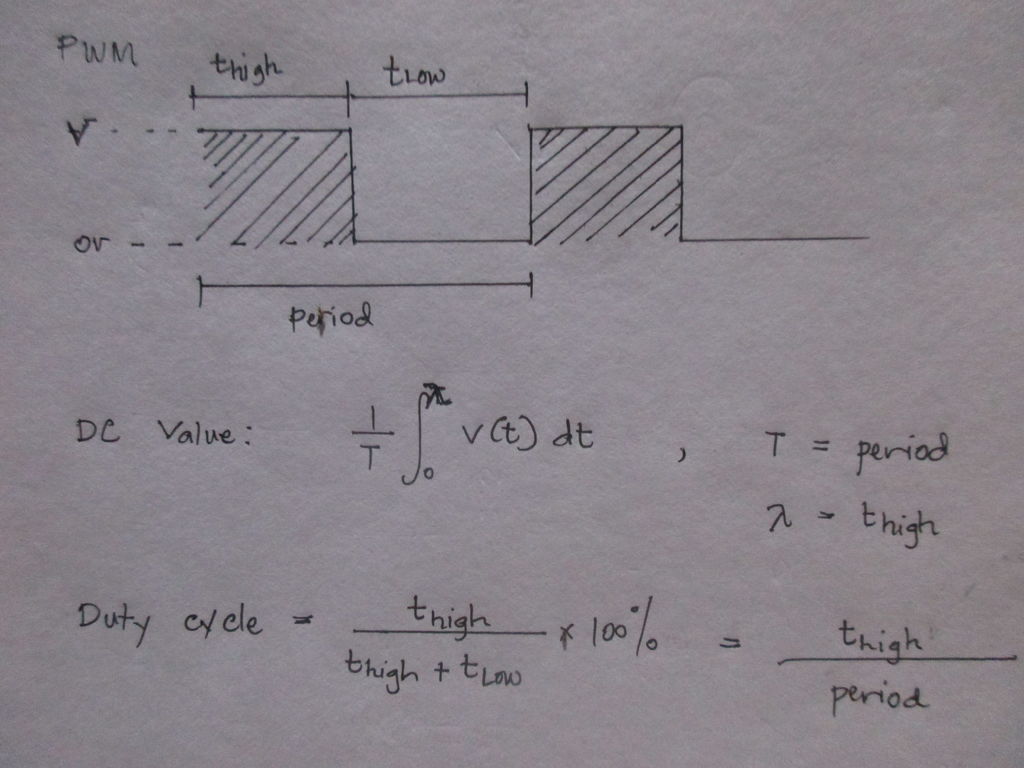
PWM或脉冲宽度调制适用于电压和电流的方波信号。在方波电压信号中,电压电平只有两个值:HIGH(Vcc)和LOW(接地-0)。方波信号是周期性的,并且具有恒定的工作频率。
占空比和脉冲宽度
与纯直流信号不同,方波信号具有电压/电流状态为高的确定间隔和电压/电流状态为低的另一个确定间隔。这两个间隔之和构成了方波的周期。然后,将占空比定义为信号处于高电平状态的持续时间除以达到一个周期所需的总时间之比。术语“脉冲宽度”是信号状态为“高”的时间量。只要定义了方波信号的频率或周期,大多数时间,占空比或脉冲宽度就可以完整地描述方波。
示例: 50 %占空比表示1 Hz信号的一个周期由等于0.5秒的脉冲宽度(信号高电平状态)和等于0.5秒的信号低电平状态组成。相同信号频率的90%占空比由等于0.9秒的脉冲宽度(信号高电平状态)和等于0.1秒的信号低电平状态组成。
由于方波是周期性的,因此具有给定期间的等效DC值或平均值,然后通过积分求解该值(请参见上图)。方波信号的DC值始终小于或等于信号为HIGH时的峰值。占空比也可以使用信号HIGH状态的平均值和峰值来求解。
占空比= [直流值/峰值] x 100%
示例:基于此基本概念,1 Hz方波信号(高= 5V,低= 0V)的50%占空比等于2.5V直流电压信号
现在,如果我们在保持频率不变的情况下改变方波信号的脉冲宽度会发生什么情况?
场景:假设我们有一个1 Hz的方波信号(HIGH = 5V,LOW = 0V),我们想比较10%,50%和90%占空比的等效dc值。对于10%的占空比,我们的等效dc值为0.5V。对于50%的占空比,直流值等于2.5V,对于90%的占空比,直流值等于4.5V。
结论
占空比与方波信号的等效DC值线性成比例。将此信号施加到电动机上,然后改变占空比/脉冲宽度,也会改变电动机看到的等效直流值,从而改变其转速。
参考文献:
[1] https://learn.sparkfun.com/tutorials/pulse-width -。..
[2] http://www.allaboutcircuits.com/textbook/semicond 。..
[3] http://www.embedded.com/electronics-blogs/beginne 。..
第3步:555定时器IC及其操作模式
555定时器IC是一种单片时序电路,它以方波信号的形式产生准确的时序延迟和振荡。这款小型IC具有很多应用,例如在振荡器,转速表,波形发生器,控制系统等中。
555定时器IC的某些功能包括:
-它可使用多种电源供电供电电压范围为+5 V至+18 V。
-吸收或吸收200 mA的负载电流。
-应适当选择外部组件,以便可以定时间隔
-555计时器的输出由于其高电流输出而可以驱动晶体管晶体管逻辑(TTL)。
-它的温度稳定性为每摄氏度温度变化百万分之50(ppm),或等效于0.005%/°C。
-定时器的占空比是可调的。/p》
在这一步中,我将不讨论内部结构的真正工作原理(只需参考下面的链接,尤其是数据表)。您可以将其视为一个黑匣子,具有8个引脚,并借助电阻器和电容器之类的外部组件,可以根据外部连接的组件的值产生振荡或定时延迟。
现在让我们根据数据表来谈谈555定时器的两种工作模式及其基本电路配置。
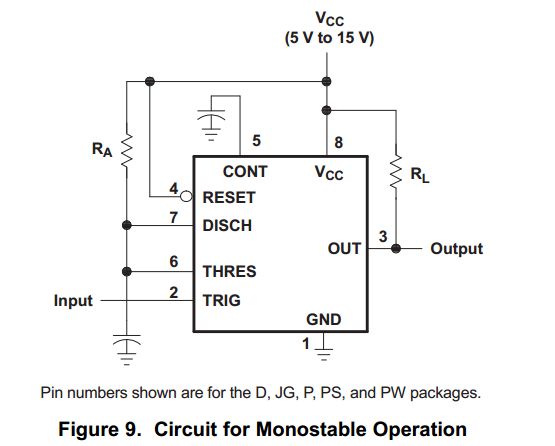
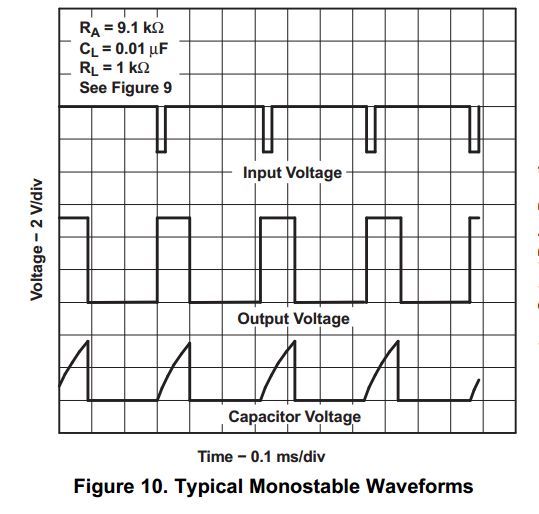
Monostable模式:
用于单稳态模式,则计时器会通过在整个延迟时间内将其输出切换为HIGH来创建定时延迟。该延迟由IC引脚2的外部输入触发。当输入引脚变为低电平时,定时延迟开始。延迟的持续时间取决于外部电阻器和电容器的值,并使用以下公式计算:
tdelay = 1.1RC
如果输入信号是周期性的,则输出也具有相同频率的周期性。如果输入信号每1秒钟变为LOW,则输出定时延迟每1秒钟重新触发一次。
假设输入LOW持续1秒钟,但您的定时延迟仅持续0.5秒钟。在时间t = 0时,假设输入开始切换为低电平,输出开始切换为高电平,并且在0.5秒的时序延迟后,输出应切换为低电平以表示延迟结束。但是,此时(t = 0.5),输入仍处于低电平状态。这可能会导致输出立即再次切换到高电平,从而重新触发延迟,应该通过将输入的低电平持续时间设置为与定时延迟持续时间相比相对较小的值来避免这种情况。换句话说,可以增加输入的占空比以减少其LOW状态的持续时间(增加处于HIGH状态的时间)。
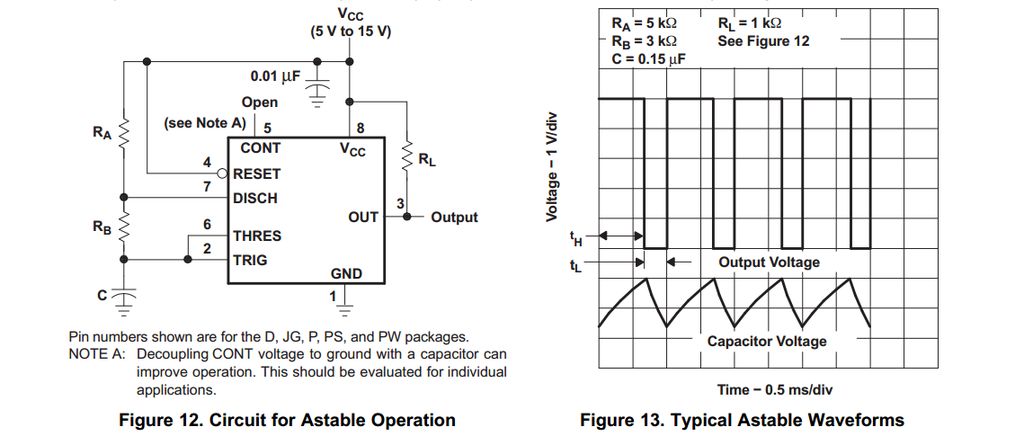
稳定模式:
非稳态模式的功能就像一个振荡器,其输出方波的频率,脉冲宽度和占空比取决于外部电阻器和电容器的值。除非。..如果您切断电源,这种振荡将永远持续下去。脉冲宽度,占空比和频率的计算公式如下:
脉冲宽度(t high)= 0.693(Ra + Rb)C
t low = 0.693(Rb) C
周期= 0.693(Ra + 2Rb)C
频率= 1/周期
占空比= [t high/周期] x 100%
根据该公式,我们可以看到,仅更改一个分量的值将导致信号的脉冲宽度,频率和占空比产生一组不同的值。不仅我们通过改变Rb或Ra的值来改变脉冲宽度,而且还改变频率。
单稳态和非稳态模式的基本电路配置如上图所示。 NE555(Texas Instruments)的参考
参考文献:
[1]第6章,实用电子手册第六版。由Ian Sinclair和John Dunton提供
[2] LM555数据表:http://www.ti.com/lit/ds/symlink/lm555.pdf
[3] NE555数据表:http://www.ti.com/lit/ds/symlink/ne555.pdf
[4] http://www.555-timer-circuits.com/
[5] http://www.electronics-tutorials.ws/waveforms/555.。.
[6] http://www.electronics.dit.ie/staff/mtully/555%20 。..
步骤4:设计动机
如前所述,其中之一控制电机速度的有效方法是通过脉冲宽度调制。如果我们计划使用555定时器的非稳定模式的基本配置,则将是不合适的,因为改变脉冲宽度也会改变方波信号的频率。
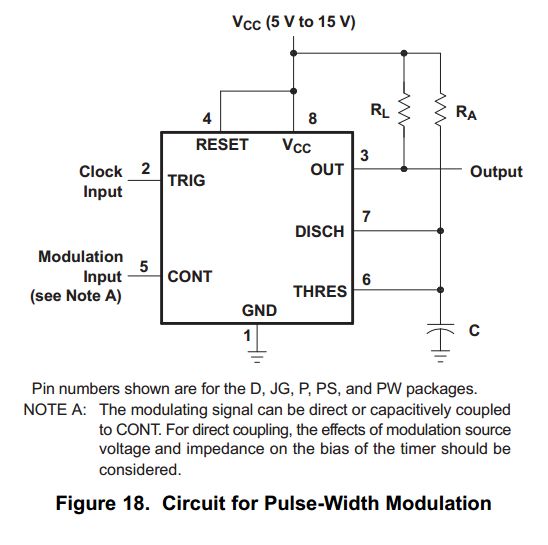
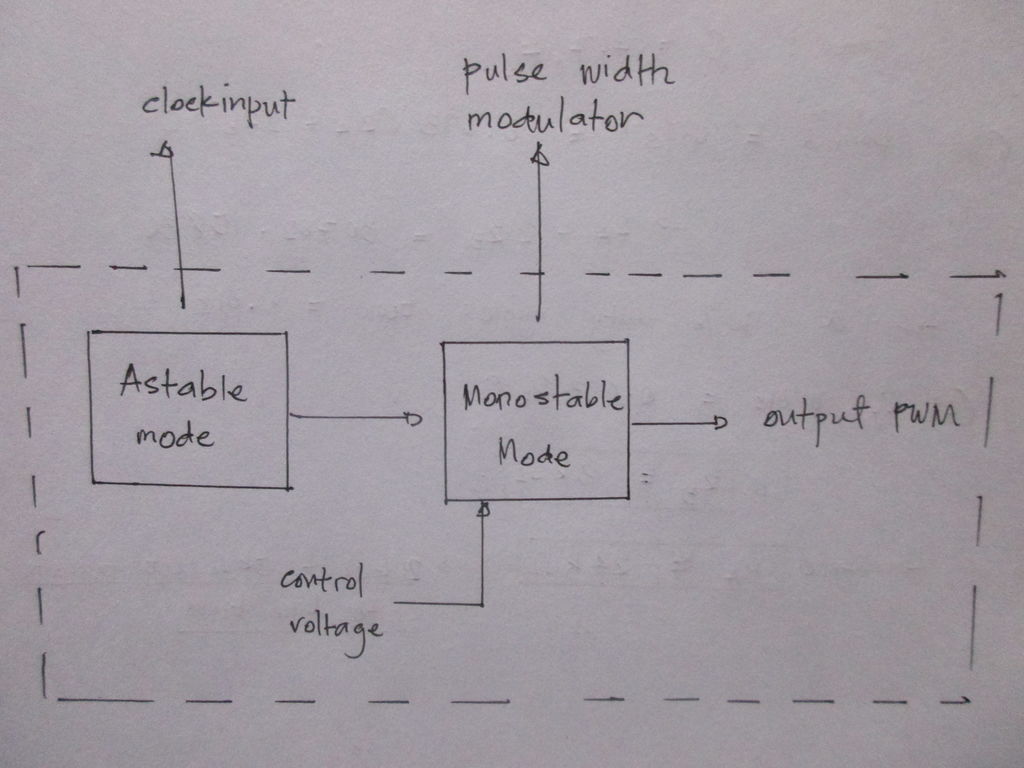
此项目的动机是NE555定时器数据表中提供的动机。在数据表的图18中,提供了脉宽调制电路的示意图。它在单稳态模式下使用555定时器,带有两个输入。一个用于时钟输入(引脚2),它负责触发输出延时信号。另一个是调制输入(引脚5),它可以改变定时器内的阈值电压,进而改变输出时间延迟,而与外部电阻器和电容器的值无关。当我说独立时,我的意思是时序延迟不遵循第3步中讨论的用于单稳态操作的公式。
查看该图,我立即想到使用另一个555定时器IC作为时钟输入,并将其配置为以约90%占空比输出的稳定模式工作,以最小化状态LOW的持续时间。对于调制输入,我只需放置一个源于Vcc的电位器即可将输入电压从0V更改为Vcc。
参考文献:
[1 ] NE555数据表:http://www.ti.com/lit/ds/symlink/ne555.pdf
步骤5:设计前的计算和设计实现
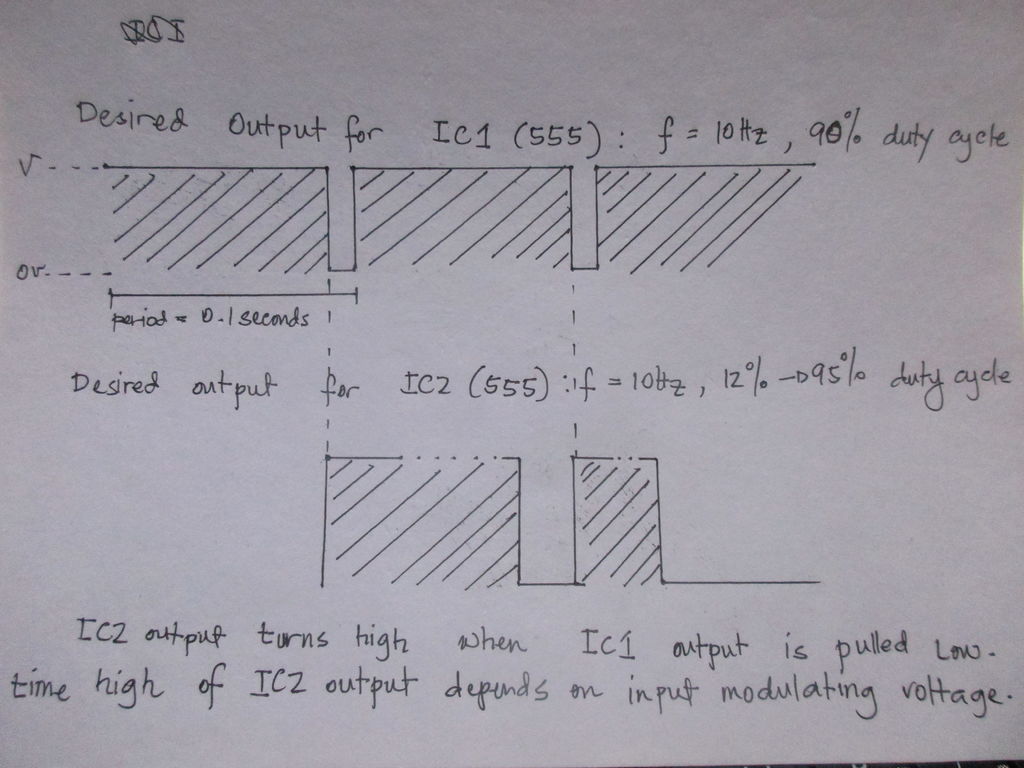
设计非常简单。我们有两个阶段:第一阶段是时钟阶段,它以恒定的频率和占空比产生振荡,第二阶段是响应触发输入和频率与输入频率相同的控制电压而产生可变的定时延迟。 br》我选择了一个10Hz的工作频率,因为我最初想到使用LED来观察其在连接到输出端时如何闪烁,随后将被DC电动机代替。通常,在处理电动机时,这是一个非常低的工作频率,因为在低占空比下运行时可能会出现抖动。通常,在与电动机打交道时,需要较高的频率(100Hz或更高)才能使电动机平稳运行,并且几乎不会注意到开关状态之间明显的切换。但是,以我的情况而言,电动机似乎仍可以在10Hz的频率下平稳运行。
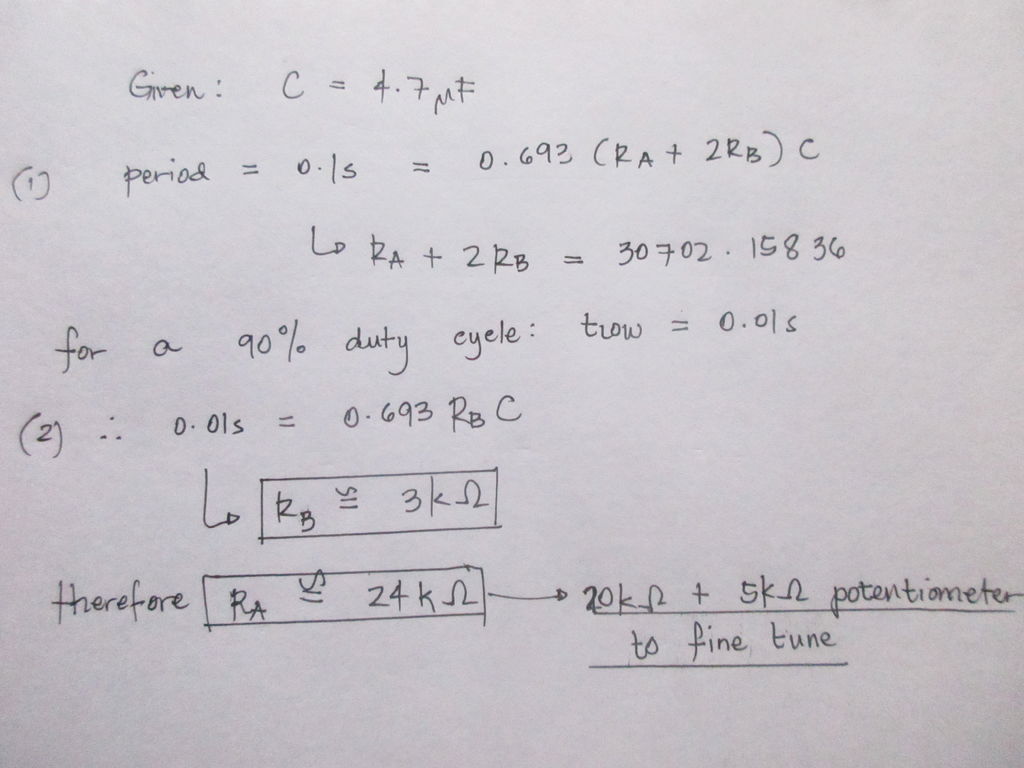
在第一阶段,我们使用了处于不稳定模式的555定时器,其工作频率为10Hz,占空比为90%。为此,我们必须计算电阻器Ra,Rb和电容器C的特定值。在这种情况下,我选择电容器值为4.7uF,从该值中我们发现Ra = 24Kohm,Rb = 3Kohm (请参阅上面的图像之一)。对于Ra,最好在实际电路实现期间使用20kohm电阻器和5kohm电位器来微调频率。
对于第二阶段,数据表提供的脉宽调制电路图表示我们必须为R和C选择值,使得RC = 0.25 x时钟输入周期。给定一个10uF的电容值,R应该等于2.5Kohm,但是我没有2.5kohm的可用空间,因此我决定用3kohm的电容代替它,因为后来知道定时延迟将取决于控制电压。
对于控制电压,我选择了一个50kohm电位器,其两个外部端子连接到Vcc并接地,而中间端子连接到第二个555定时器IC的控制电压引脚(引脚5)。 p》
步骤6:电路实现
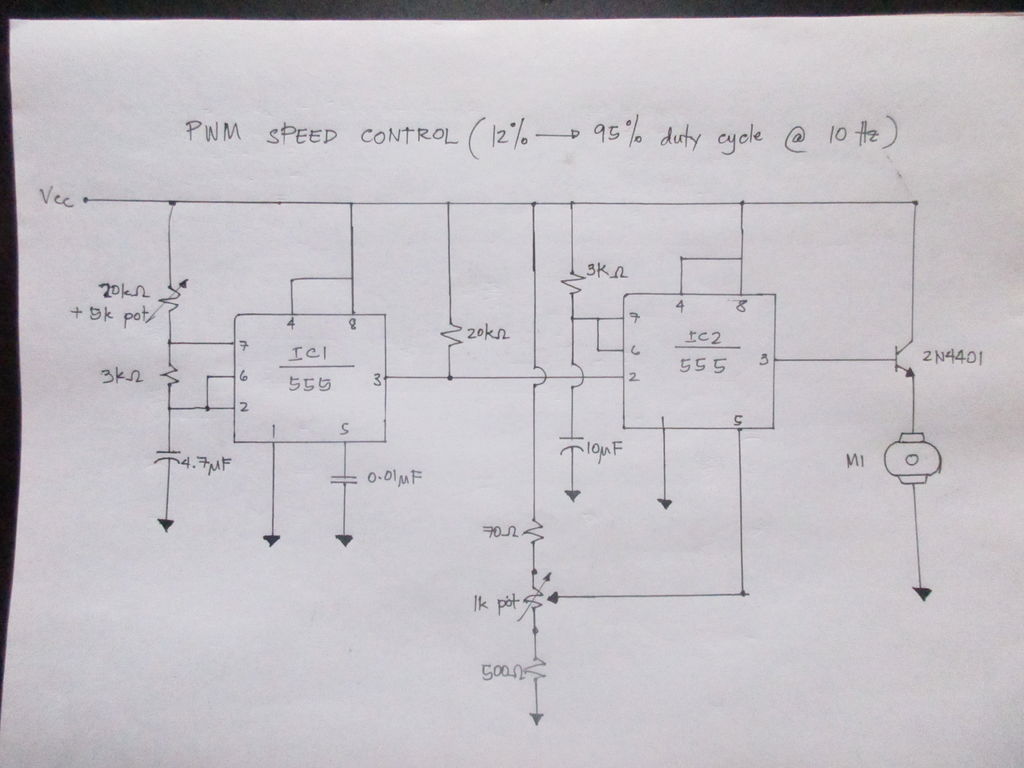
我想出了一个电路图如上所示。您可以在试验板上进行配置。您可以在电动机上并联一个反激二极管,以保护电路免受突然的电压尖峰影响。您可能还会注意到连接到IC2的控制电压引脚的一系列电阻(70ohm,500ohm和1kohm电位计)。同样,您可以用单个50kohm电位器或什至更大值的电位器代替此配置。这对于下一步至关重要,因为上述电路图已经是最终电路图。我们需要首先响应输入控制电压测试输出,以查看其是否确实符合我们的初始假设。
材料:
-两个LM555计时器IC
-两个20kohm电阻
-5kohm,1kohm和50kohm电位器
-两个3kohm电阻
-70ohm电阻
-500ohm电阻
-4.7uF 16V电容
-10uF 16V电容
-0.01uF电容
-9V直流电动机
-2N4401 NPN晶体管
恒定的9V电源
-二极管(电动机可选)
第7步:控制电压
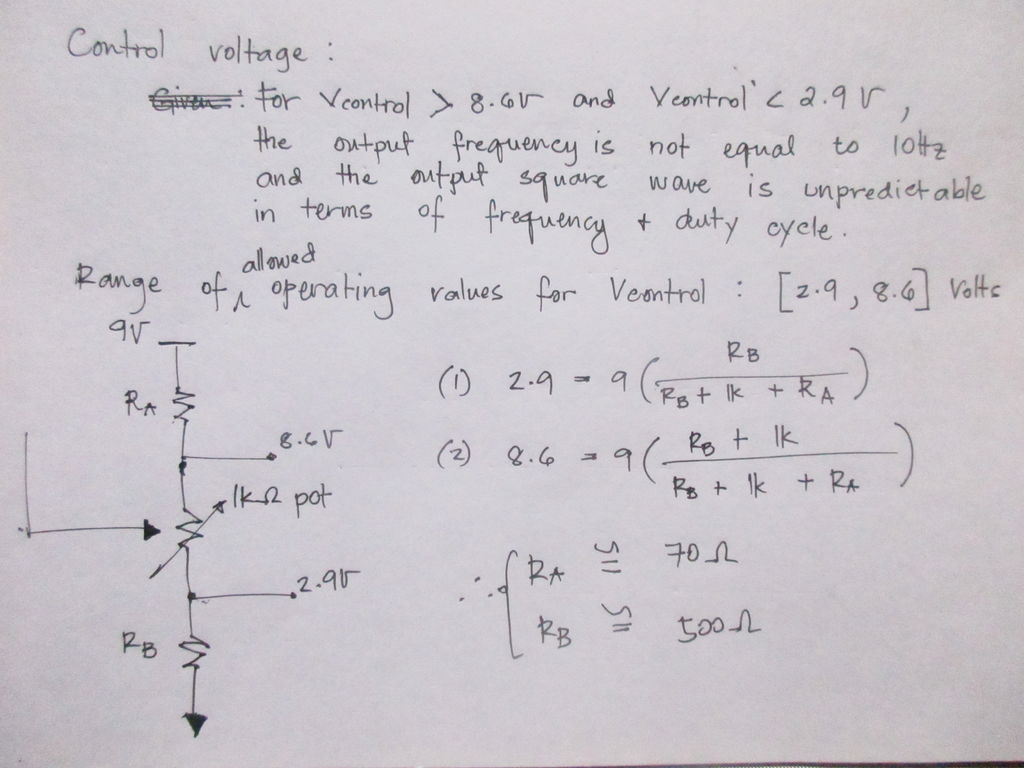
为测试输出如何响应控制电压,我决定最初使用50kohm电位计来改变引脚的输入电压IC2的5。我发现,当输入电压低于2.9V时,输出频率变得无法预测,有时我的万用表读数为15Hz,20Hz,30Hz等。同样在2.9V时,万用表的输出占空比约为11%。如果您还记得我们在第3步(555 timere IC的可Monostable操作)中曾详细讨论过的情况,那正是输入控制电压从2.9 V进一步降低时发生的情况。理想情况下,输出占空比应该减小,但请记住,时钟占空比为90%,因此,输入LOW状态的持续时间为总周期的十分之一。减小输出占空比也意味着减小延时时间,并且当其达到输出延时小于时钟输入低电平持续时间的点时,输出将重新触发,因为当其切换为高电平时,输入触发仍为低电平。重置延迟,就好像万用表看到的频率增加一样。在这些条件下,理想的最小占空比输出必须为10%,但根据初始测量,发现约为11-12%。另一方面,当输入控制电压大于8.6V时在测量占空比为95%的情况下,输出频率降低到5Hz,我能想到的唯一解释是:增加占空比进一步意味着增加与下一个触发输入重叠的延时时间。当输入触发低电平时,输出仍为高电平,这意味着时间延迟仍在上升,因此触发输入将被忽略。好像IC2一次跳过一个输入触发器,从而将输出频率降低了一半。
基于此发现,我们需要创建一个电阻器配置,这次使用1kohm电位计,使得最小值输入到IC2的控制引脚的最大电压为2.9V,使用9V电源时最大输入电压为8.6V。为此,我发现需要两个与电位器串联的电阻。 (计算如上图所示。)
有了此电阻器配置,我们现在可以测试整个电路是否按最初计划工作。
步骤8 :测试实际电路/结果和讨论
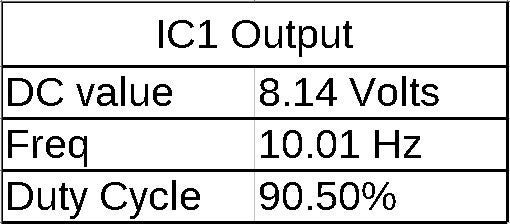
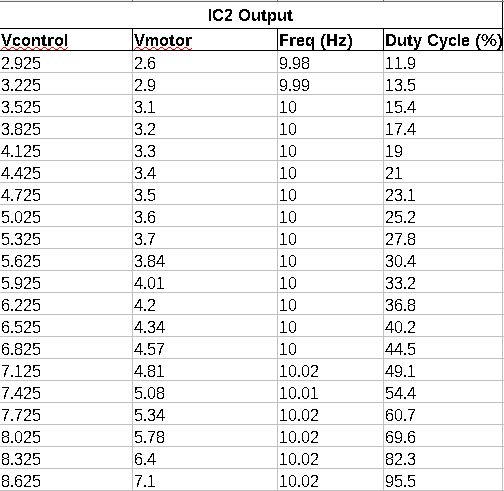
最后一步是测试一些必要的参数以验证初始假设。我没有速度测量设备,但幸运的是,我的万用表还具有用于频率和占空比测量的附加功能。我别无选择,只能相信他(万用表),因为他是我唯一的一个。可以通过聆听电动机在旋转时产生的声音来观察电动机的速度,并可以通过测量占空比和跨电动机的等效直流电压来验证电动机的速度。结果如表所示。
责任编辑:wv
-
直流电机
+关注
关注
36文章
1785浏览量
74237 -
555定时器
+关注
关注
41文章
317浏览量
70241
发布评论请先 登录
直流电机接线的相关问题

交流电机与直流电机调速方法

探索用于Arduino的TLE94112ES直流电机控制盾牌
CW32电机控制基础——无刷直流电机换相控制原理
单片机直流电机调速原理
浮思特 | 无刷电机与有刷直流电机的区别是什么,该如何选择?
无刷直流电机双闭环控制的仿真研究
无刷直流电机模糊自适应PID的研究及仿真
无刷直流电机改进型直接转矩控制研究
无刷直流电机的控制研究
EtherCAT科普系列(10):EtherCAT技术在无刷直流电机驱动系统领域应用

改进的BP网络PID控制器在无刷直流电机中的应用
电机:无刷直流电机的原理



评论