 基于DTMF的障碍回避机器人的制作
基于DTMF的障碍回避机器人的制作

第1步:方框图
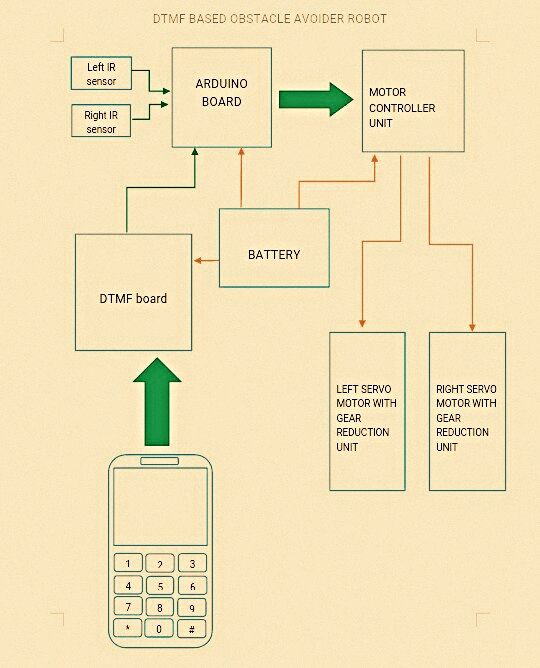
项目背后的工作原理如图所示,
第2步:开始使用ARDUINO BOARD
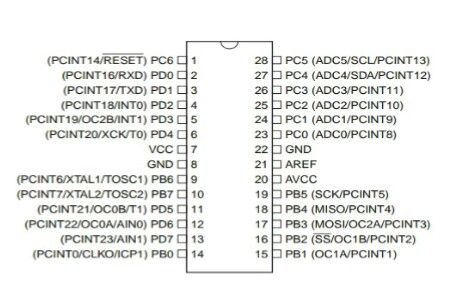
ARDUINO BOARD电路板的优势,所有必要的程序都被提供给这个板,它可以控制所有,
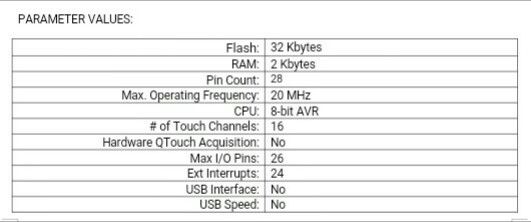
ATmega328是由Atmel创建的单芯片微控制器,属于megaAVR系列。 ATmega328P是一款基于AVR增强型RISC架构的低功耗CMOS 8位微控制器。通过在单个时钟周期内执行强大的指令,ATmega328P实现了接近每MIPS 1 MIPS的吞吐量,使系统设计人员能够优化功耗与处理速度。
特点:
高性能,低功耗Atmel®AVR®8 -Bit微控制器系列
高级RISC架构
-131功能强大的指令 - 大多数单时钟周期执行
-32 x 8通用工作寄存器
- 完全静态工作
- 高达20 MIPS 20MHz时的吞吐量
- 片上2周期乘法器
- 写入/擦除周期:10,000闪存/100,000 EEPROM
- 数据保持:85℃下20年和250℃下100年
- 编程锁定用于软件安全
工作电压:1.8 - 5.5V
温度范围:-400C至850C
速度等级:0 - 4MHz@1.8 - 5.5V,0 - 10MHz@2.7 - 5.5.V ,0 - 20MHz @ 4.5 - 5.5V
1MHz,1.8V,250C时的功耗
- 工作模式:0.2mA
- 功耗模式:0.1μA
- 省电模式:0.75μA(包括32kHz RTC)
系列替代方案:
ATmega328的常见替代品是“picoPower”ATmega328P。可以在Atmel网站上找到megaAVR系列所有其他成员的完整列表。
应用:
今天,ATmega328常用于许多项目和自治系统,其中简单,低功耗,低成本需要微控制器。也许该芯片最常见的实现是在流行的Arduino开发平台上,即Arduino Uno和Arduino Nano模型。
第3步:DTMF BOARD
在这个DTMF板的帮助下,以频率形式从我们的移动电话中发出的信号被传送到逻辑值并被送入ARDUINO板,
什么是DTMF?
DTMF代表双音多频。
DTMF是按键式电话的常用通信术语。在电话上拨打键盘时形成的音调(DTMF数字或DTMF号码)可用于表征数字,并且每个数字使用一些不同的音调。 DTMF信令主要用于DTMF电话,电话交换系统。许多公司生产发送和接收DTMF信号的微芯片。电话应用程序接口(TAPI)为程序提供了一种检测DTMF数字的方法。
DTMF解码器如何工作?
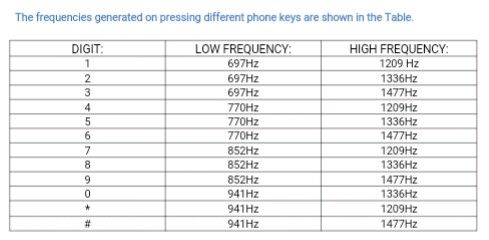
然而,随机声音总会出现在相似的频率上DTMF音响系统。建议如果使用两个音调来表示数字,则排除发生错误信号的概率,因此称为“双音”。这是在DTMF通信中使用双音的基础。 DTMF拨号使用带有12或16个按钮的键盘。在键盘上按下的每个键产生两个特定频率的音调,因此语音或随机信号不能模仿DTMF信令音调。一个音调由高DTMF频率组音调产生,另一个音调从低DTMF频率组产生。
当按下一个按钮时,行和音调都由电话或按键音乐器产生。这两种音调将是独特的,并且与其他键的音调不同。因此,有一个与按钮相关的低频和高频,它实质上是两个波传输的总和。该基本原理可以扩展到一系列应用。键盘的每行和每列对应于特定音调并创建特定频率。每个按钮位于两个音调的交叉点。
应用:
DTMF信号可通过无线电传输,以开启或关闭家用电器,闪光灯,电机,摄像机,警告系统,灌溉系统等上。这些编码数据可以在微控制器中存储和处理,以执行不同的任务(即):自动车库门打开系统,使用DTMF技术的手机控制机器人车辆等。..。..
步骤4:电机驱动电路
电机驱动器作为继电器运行,然后运行根据ARDUINO板执行的指令伺服电机,
特点:
。供电电压高达46 V
。直流电流高达4 A
。低饱和电压
。过温保护逻辑“0”输入电压高达1.5 V(高噪声抗扰度)
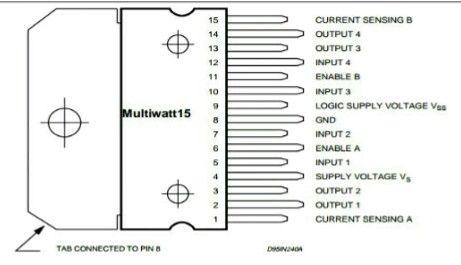
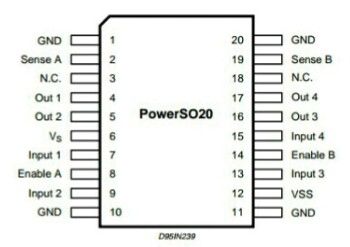
描述:
L298是采用15引脚Multiwatt和PowerSO20封装的集成单片电路。它是一款高电压,大电流双全桥驱动器,设计用于接受标准TTL逻辑电平并驱动感性负载,如继电器,螺线管,直流和步进电机。提供两个使能输入,以独立于输入信号启用或禁用器件。每个桥的下晶体管的发射极连接在一起,相应的外部端子可用于连接外部传感电阻。提供额外的电源输入,以便逻辑工作在较低的电压。
步骤5:工作
最后全部使用必要的电线连接,项目准备按照我们的命令工作,
通过连接AUX电缆与电话和本地电路板,信号可以传输到ARDUINO板,从而命令执行。
在我的项目中,我只提供了几个命令,例如,如果我点击1,汽车前进2 - 》后退
3 - 》右转
4 - 》向左转弯
5 - 》在当前点停止
-
机器人
+关注
关注
213文章
30603浏览量
219666 -
DTMF
+关注
关注
1文章
74浏览量
48038
发布评论请先 登录
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
当复合机器人碰到障碍物,会触发怎样的智能绕障机制?





 工商网监
工商网监
评论