 3D打印四足机器人的制作教程
3D打印四足机器人的制作教程

第1步:打印3D模型
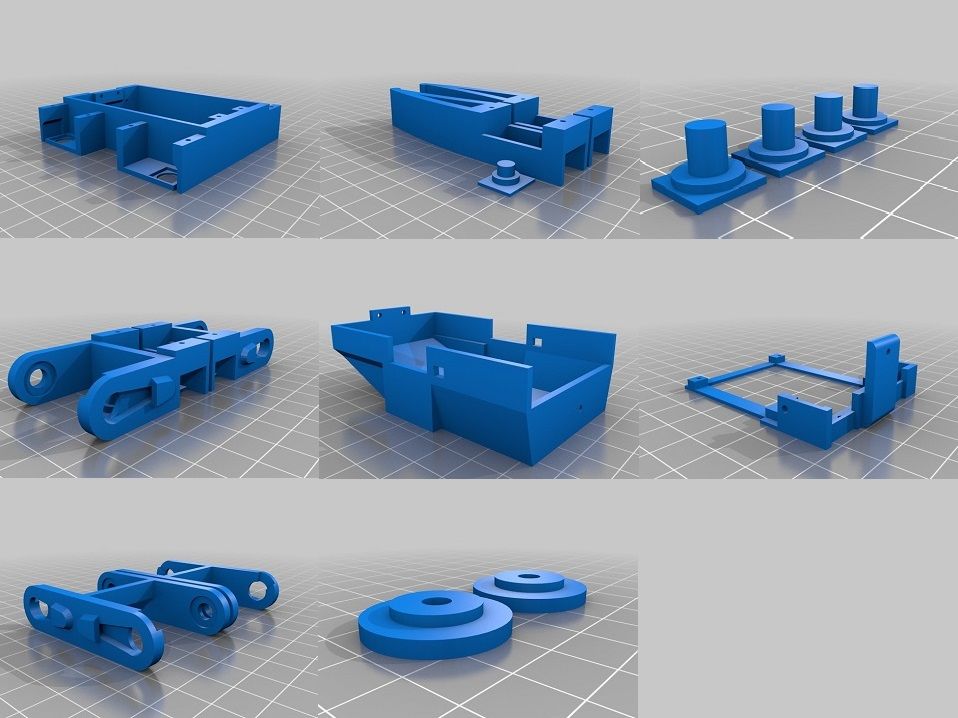
您可以调整它们以适合您正在使用的3D打印机。如果您没有3D打印机,您可以找到在线3D打印服务。
底部/顶部厚度:1mm
外壳厚度:1.2mm
ayer高度:0.2mm填充
密度:10%
支持:是
粘合类型:裙边或边缘
第2步:软件
软件可免费下载:
机器人代码 -
githup上的Arduino代码
通过Arduino软件中的open firmware.ino上传Arduino代码,请参阅IOS app上的步骤10和Android应用程序上的第11步一起控制机器人。
for HuaDuino,在Arduino IDE软件中:
电路板选择:“Arduino Nano”,处理器“ATmega328”对于AVR板支持1.6.20或更早版本;
电路板选择:“Arduino Nano”,处理器“ATmega328(旧引导程序)”,用于AVR板支持1.6.21或更新版本。
控制应用
goble - Apple Store上的iOS应用
playBLE - Android应用开启Google Play
virtual-gamepad-BLE - 支持者为Android 5.0和最新版本提供的Android应用程序。
虚拟游戏手柄-SPP Android应用程序由HC-06,HC-05和SPP-CA经典蓝牙4.0 SPP模块的支持者提供;与Android 4.0及更高版本兼容
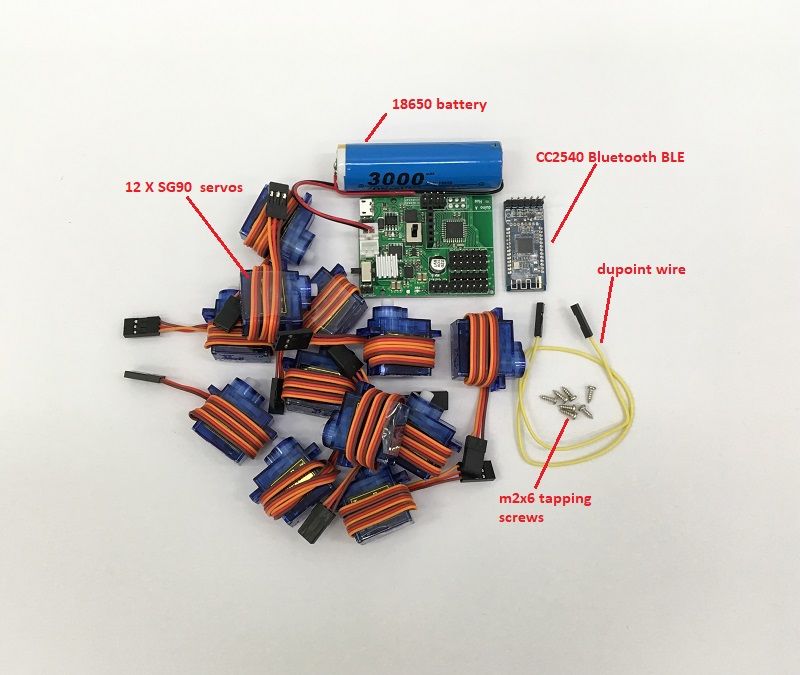
步骤3:硬件
主要 -
一款华都诺主板,它与Arduino Nano兼容,增强功能。它将所有内容集成在一块PCB上。人们用它制作机器人要容易得多。嵌入式电池充电电路,电池充电更方便。它可以在ebay上找到。
单个3.7V 18650锂离子电池或带XH2.54连接器的电池组,如果您需要更长的运行时间,并获得两个18650并联的电池组。您可能想要使用这个18650电池座。然而,使用3.7V 10440锂离子和3.7V锂聚合物电池尺寸不大于W35mm,L70mm和T60mm也是可以的。
12 x Tower Pro SG90或兼容的9g伺服电机。
女性 - 女性双绞线或任何可以用来连接两个引脚的东西
一些m2x6自攻螺钉
蓝牙模块 - 如果您不需要App控件,则此模块是可选的
HC-06,HC-05和SPP-CA经典蓝牙4.0 SPP模块 - 如果您不需要App控制,这是可选的。如果您使用此类型的蓝牙模块,则必须使用虚拟游戏手柄-SPP Android应用进行控制;波特率必须设置为115200;请参阅本教程,使用AT命令配置波特率;
或
BT-05 CC2540蓝牙LE模块 - 如果您不需要App控制,这是可选的。实际上,有许多BLE模块的命名方式不同,但它们都是用CC254x芯片构建的。 HM-10和CC41-A等示例是市场上常见的典型产品。由于固件不同,AT命令集也可能不同。您可以使用此代码来识别它们。要使用机器人代码和应用程序,需要将波特率设置为115200;服务UUID必须设置为0xDFB0,并且使用AT命令将特征UUID设置为0xDFB1。下面是自动执行此操作的代码,但如果您有不同的代码则可能无效。可以在此处下载用于配置BT-05 BLE的AT命令集的引用。如果你想让这个游戏手柄控制并玩Spidey,你不需要这个模块。
以下只需要蓝牙LE模块
以下Arduino程序发出AT命令设置BLE模块服务UUID,特征ID和波特率,假设BLE默认波特率为9600.为了在HuaDuino中运行以下代码并将模块放在其上,S1开关必须设置为BT位置。
void setup() {
Serial.begin(9600); //change to fit your ble initial baud_rate, usually is 9600
Serial.println(“AT+UUID0xDFB0 ”); // set service UUID
delay(50);
Serial.println(“AT+CHAR0xDFB1 ”); // set characteristic UUID
delay(50);
Serial.println(“AT+BAUD8 ”); // set baud rate to 115200
}
void loop() {}
将Arduino草图上传到HuaDuino进行BLE控制的步骤如下:
插入BLE模块,将S1切换到USB侧,打开huaduino,
上传上面的模块设置程序
关闭huaduino,将S1切换到BT侧
转在huaduino上,让ble模块安装程序在几秒钟内运行。
将S1切换到USB端
上传机器人程序
将S1切换回BT侧,机器人现在可以通过BLE控制
步骤4:安装伺服系统和控制板
步骤5:腿
步骤6:伺服接线
连接HuaDuino的数字引脚如下:
D2到右前方股骨伺服
D3到右前方胫骨伺服
D4到右前方coxa伺服
D5到右后方股骨伺服
D6向后右胫骨伺服
D7向后右舵伺服
D8向左前方股骨伺服
D9向左前方胫骨伺服
D10到左前舵伺服
D11到左后股骨伺服
D12到左后胫骨伺服
D13到左后舵伺服
步骤7:校准
使用A5和3.3V引脚之间的母 - 母双绞线,机器人伺服系统将设置为默认参考角度。这是安装伺服系统并使伺服臂加盖在正确角度的状态。
步骤8:安装伺服臂
连接在A5和3.3V引脚之间的母 - 母双绞线,将伺服臂置于伺服轴上
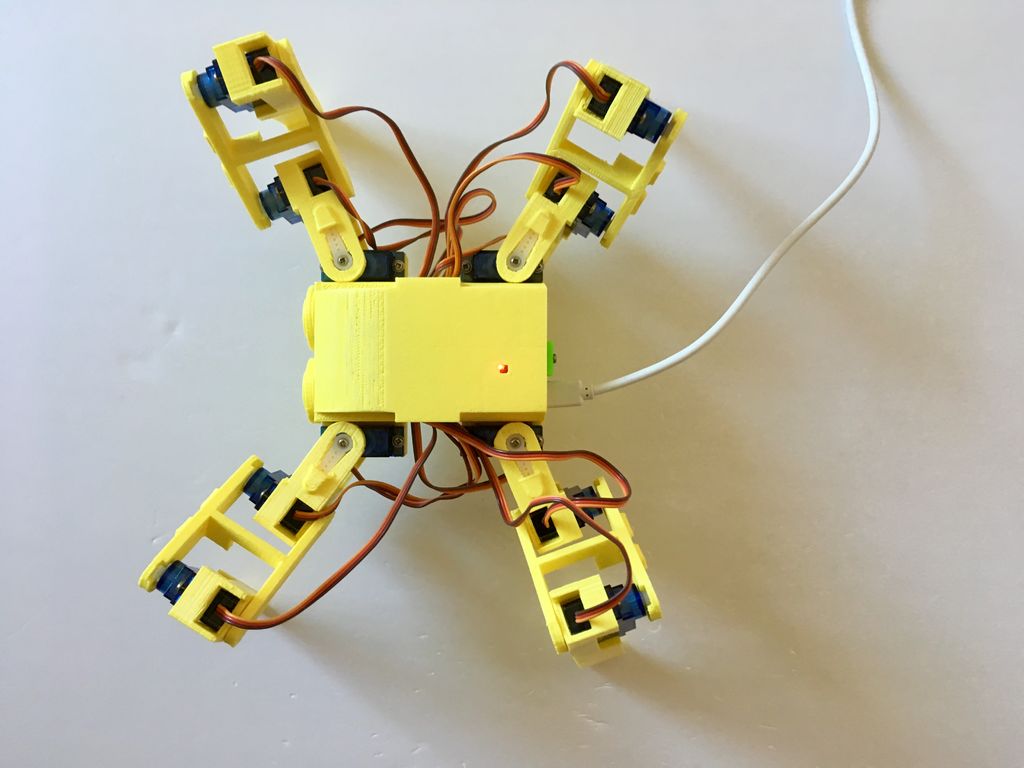
步骤9:完成
将CC2540蓝牙BLE模块插入主板的蓝牙连接器,然后将S1开关滑到BT侧,最后用顶盖和眼睛关闭机器人。
步骤10:使用iPhone播放
要成功完成此部分,您必须配置CC2540蓝牙BLE模块,请参阅步骤3 - 硬件
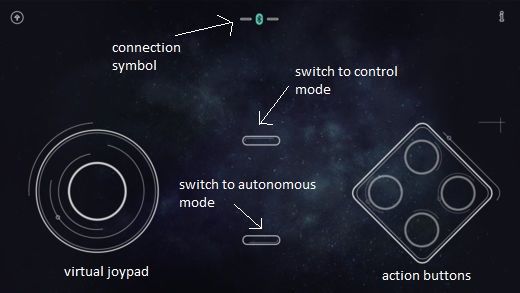
打开iOS应用并关闭机器人
几秒钟后,机器人和iPhone之间的BLE配对应该完成,你会看到连接符号变为绿色
按下顶部中间虚拟按钮将机器人切换到控制模式
按下底部中间虚拟按钮将转动b ack to autonomous self walk mode
步骤11:使用Android手机播放
打开Android应用程序,当机器人按下连接符号关闭顶部边缘
几秒钟后,您应该看到列出的BLE设备并选择它,连接符号应在成功时变为蓝色
按顶部中间虚拟按钮将切换到控制模式
按下底部中间虚拟按钮将返回自主自行走模式
步骤12:电池充电
红灯表示正在充电
绿灯表示充电已完成
-
机器人
+关注
关注
213文章
31440浏览量
223639 -
3D打印
+关注
关注
28文章
3652浏览量
118712
发布评论请先 登录
价值20万的机器人做大奖!创想三维携手智元,加速3D打印破圈

3D视觉引导拆码垛:一文读懂“机器眼”如何指挥机器人搬货?

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
禾赛科技2025年割草机器人3D激光雷达出货量第一
普渡D5在全球首个机器人登高挑战赛中斩获轮式四足机器人组冠军

常见3D打印材料介绍及应用场景分析

普渡机器人发布行业级四足机器人PUDU D5系列, 引领多形态具身智能发展
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
中国科学院研发3D手型微纳机器人
奥比中光领跑韩国机器人3D视觉市场
3D打印机器人堵头预警:加热器NTC热敏电阻响应速度测试
最新发布!泰科机器人发布首款自研双足人形机器人

3D打印能用哪些材质?




评论