 微型四轴飞行器DIY图解
微型四轴飞行器DIY图解

第1步:零件清单

您需要以下部件:
- 飞行控制器:我使用的是Matek F411-mini。您可以使用任何所需的飞行控制器。请记住,对于WifiPPM,您需要至少300mA的3V电压,对于3D相机,需要至少500mA的5V电压。
- 15A ESC
- 4 x 1104无刷电机
- 2435用于90mm机架的4个叶片螺旋桨,用于82mm机架的2030个3叶片螺旋桨或用于109mm机架的3020个2叶片螺旋桨
- WIFIPPM或任何其他接收器(与instructable不同我现在使用带有外置天线的ESP07)
- 用于Android的Lowcost 3d FPV摄像头(我添加了新的3D打印凸轮架和VTX支架)
- GY63 Baro if你想添加高度保持模式(在我的构建中从未令人满意)
- 如果您想使用它,请使用小蜂鸣器。我用它作为电池警告。
- 2S电池。我使用的是1000mAh LiPo。
- 电池连接器
- 一些小塑料垫片,螺母和螺丝
- 来自ebay的长20mm M2塑料吸头
- 3D打印框架,支撑杆和支架
- 用于固定电池的一些橡胶带
步骤2:打印框架和支柱警卫
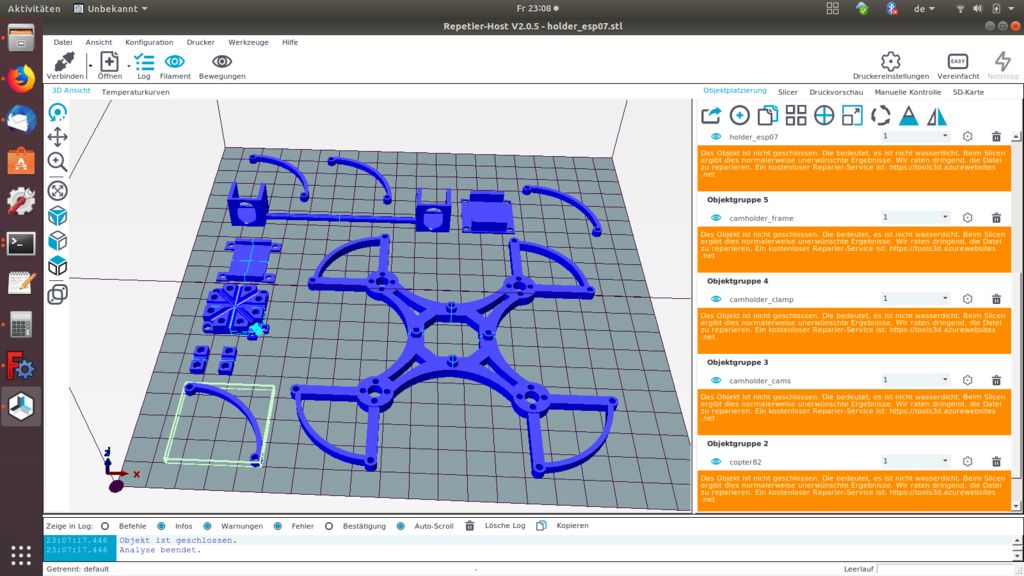
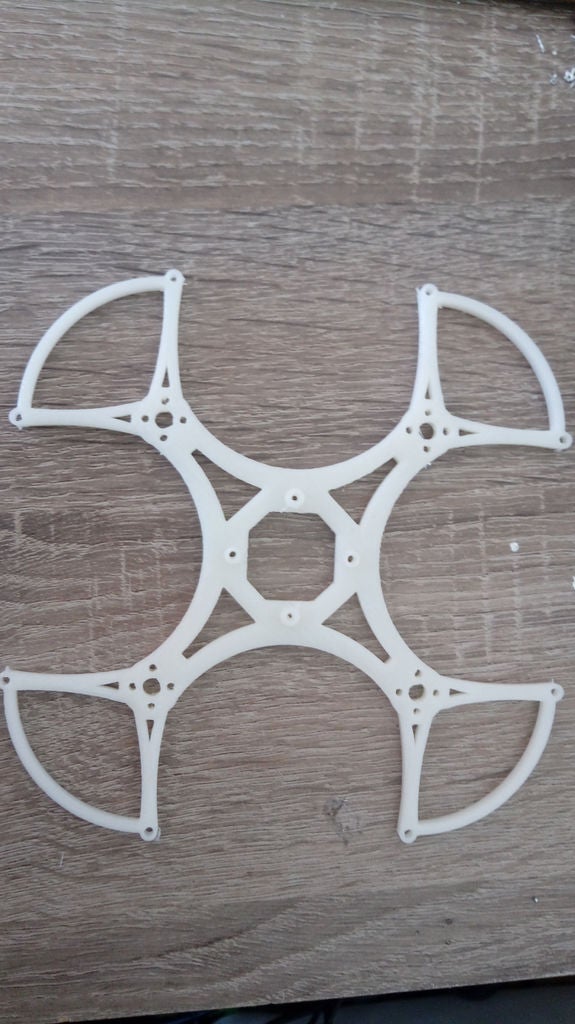
第一步是所有部分。我使用PLA配有0.3mm喷嘴和50%填充物。
我添加了三种不同的框架尺寸。 82毫米的框架非常小,但飞行时间只有3分钟左右,推力几乎太低。 90毫米的框架是飞行时间和尺寸之间的最佳折衷。飞行时间约为5分钟。推力还可以。 109毫米的机架具有最佳的飞行时间(约7分钟)和最佳推力,但缺点是尺寸。
我还为3D摄像机增加了一个新的凸轮架,还为VTX和ESP8266增加了一些支架。 。
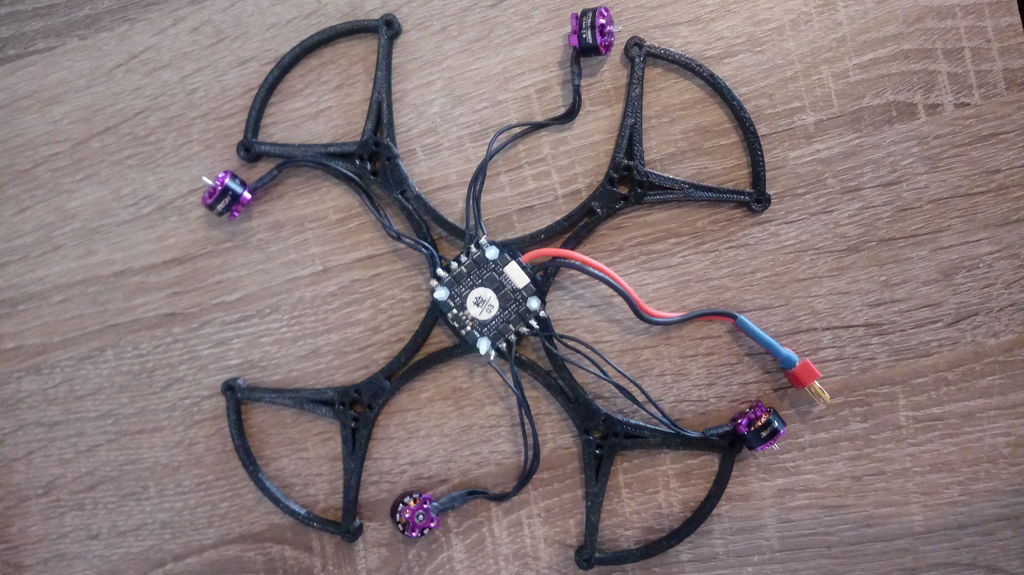
步骤3:添加ESC和电机


在您继续之前,您应该已经完成了“WIFIPPM”和“适用于Android的低成本3D FPV摄像机”。
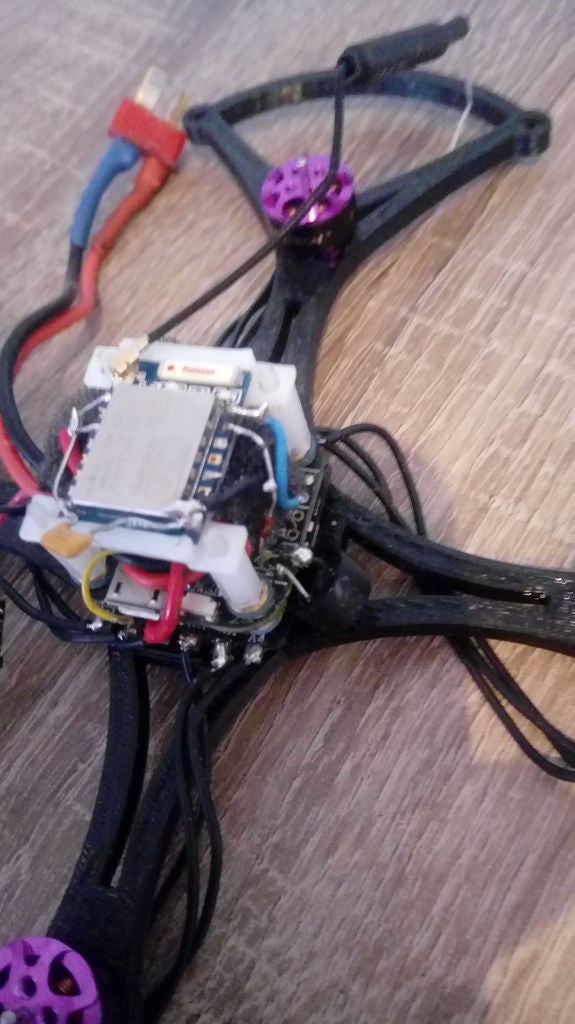
将所有四个电机添加到框架中。然后将ESC添加到框架中。使用M2x20塑料螺丝和M2螺母。现在将电机连接到ESC,如第一张和第二张图片所示。电机的方向将在稍后调整。将电源插头添加到ESC的电源线,如第三张图所示。
步骤4:将电子设备添加到飞行控制器
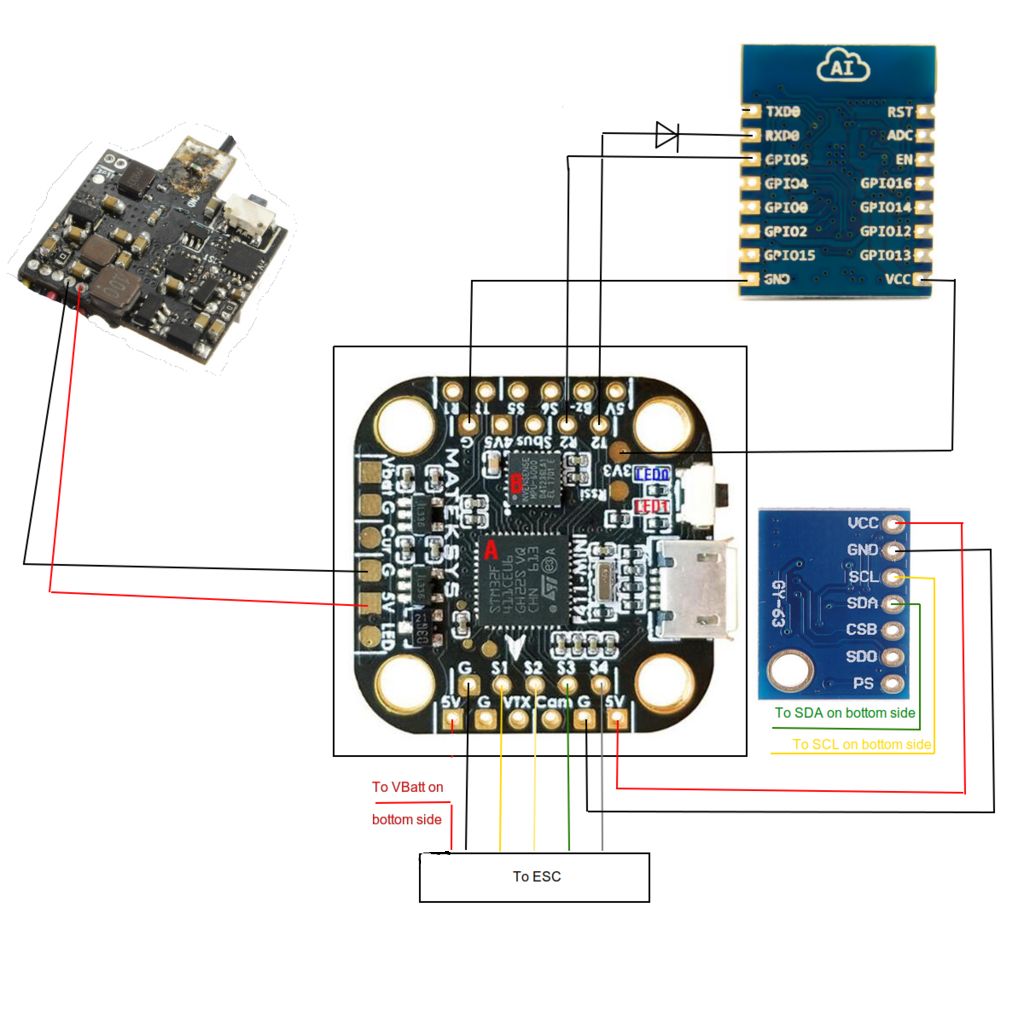
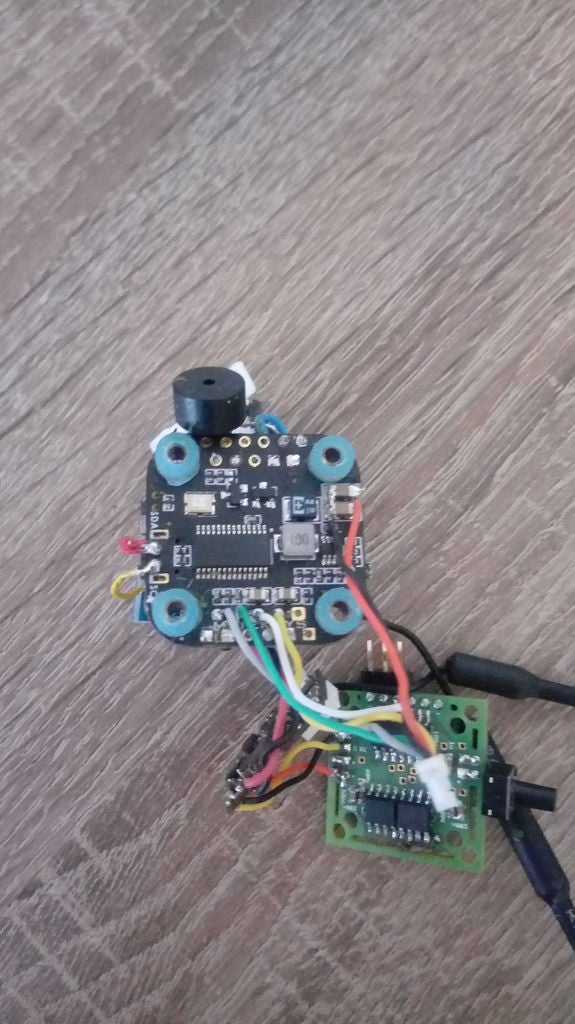

现在将ESC电缆焊接到飞行控制器上。 USB插头应位于连接的另一侧。您可以在第一张图片中看到连接。
S1 - 》黄色S2 - 》白色S3 - 》绿色S4 - 》灰色G - 》黑色VBAT - 》红色我将VBAT和GND连接到电容器,因为连接焊盘位于另一侧。
将硅和黄铜垫圈添加到飞行控制器。
如果要使用它,请添加baro。 SDA和SCL也位于电路板的底部。 + 5V和GND位于顶部。
现在连接WifiPPM。将PPM输出连接到飞行控制器的RX2。将WIFIPPM的+ +连接到3.3V,GND连接到G.我还在飞行控制器的TX上添加了一个二极管到ESP8266的RX,因为我现在用后向通道和MSP协议进行了一些测试。您不需要这个。
使用VTX添加3d摄像头并将+连接到+ 5V并将GND连接到G.
如果您使用蜂鸣器也将其添加到蜂鸣器
现在你把所有的电子设备放在一起。
第五步:把所有东西放在一起

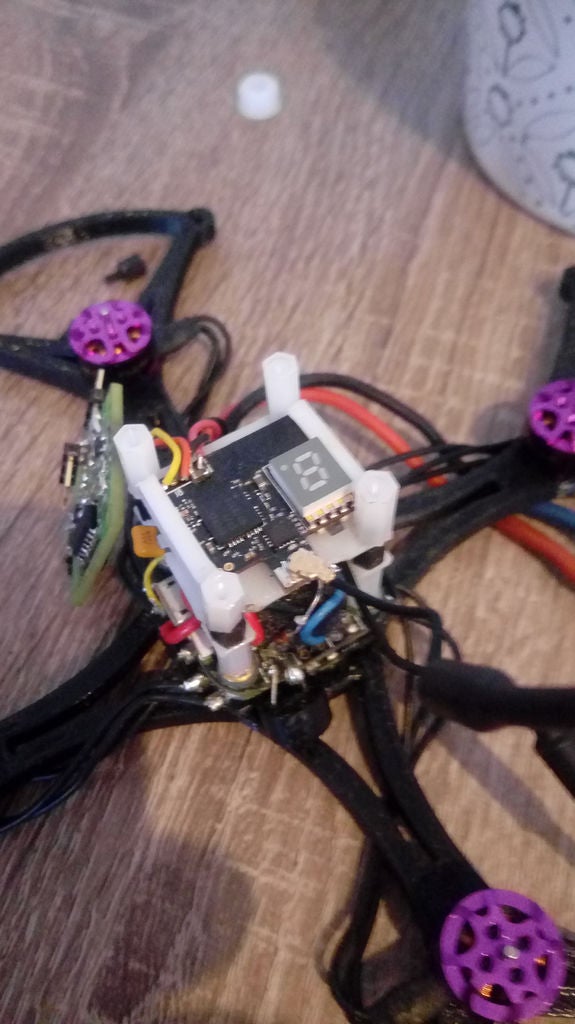


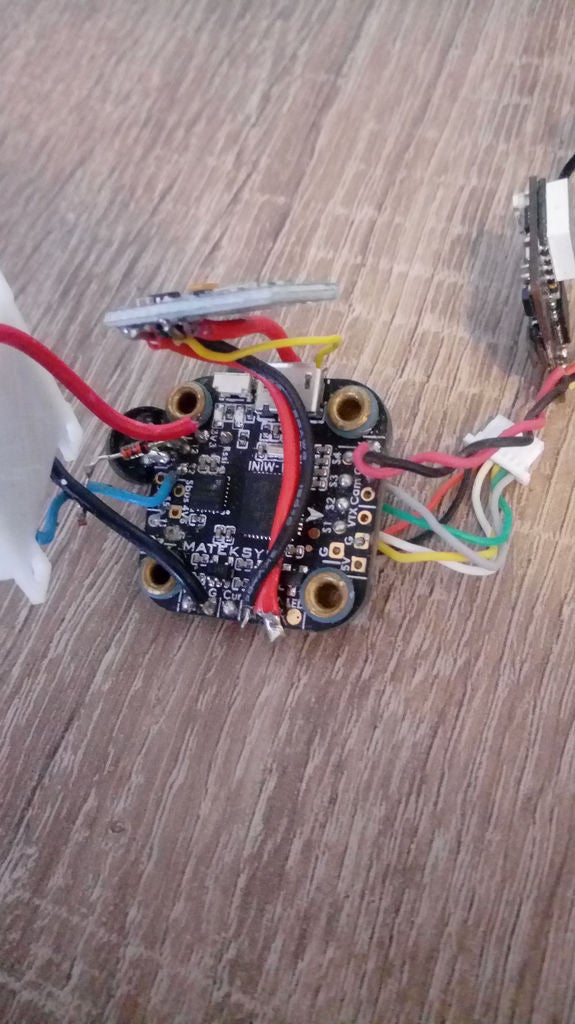
将电缆连接到ESC插头,并将飞行控制器放在ESC顶部。前箭头应指向ESC插头的方向。放一些较长的垫片来固定飞行控制器。如果您不使用baro,可以使用短垫片。 (第一张图片)
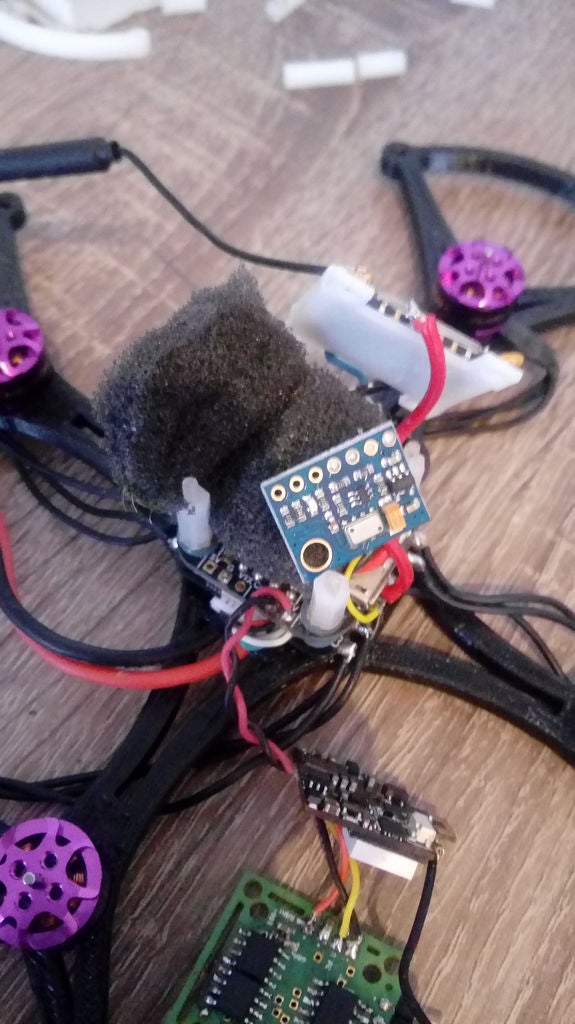
现在在baro周围放一些泡沫以消除空气流动。把baro放在ESC的顶部。它没有用任何螺钉固定。它只是由泡沫和它顶部的支架固定。 (第二张和第三张图片)
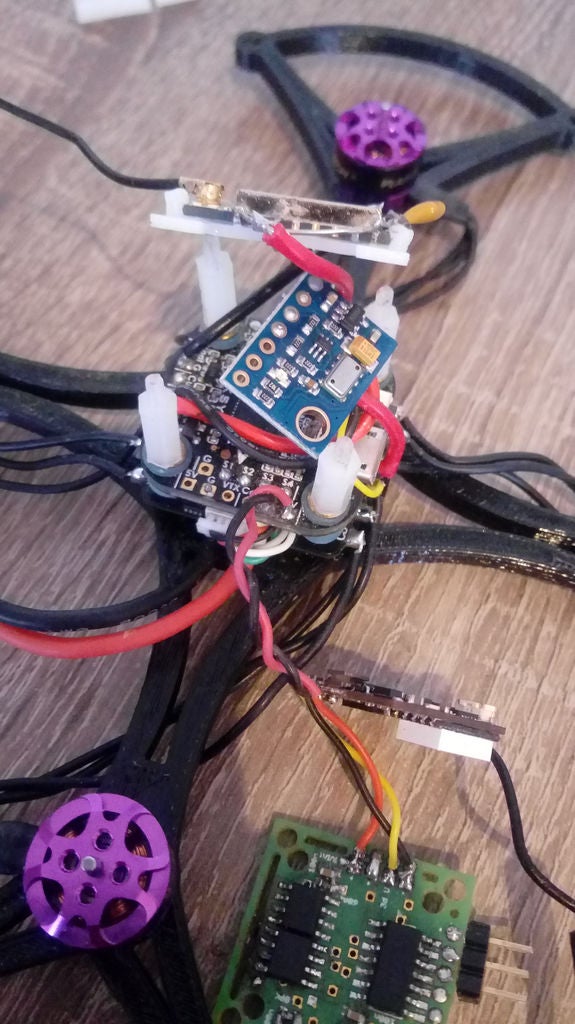
然后将ESP8266放入其印刷支架并将其放在上面。用一些短的垫片修复它。你也可以添加一个外置天线以获得更好的射程。(第四张图片)
在它的顶部放上VTX和它的印刷支架,再放一些长的垫片。 (第五张图片)
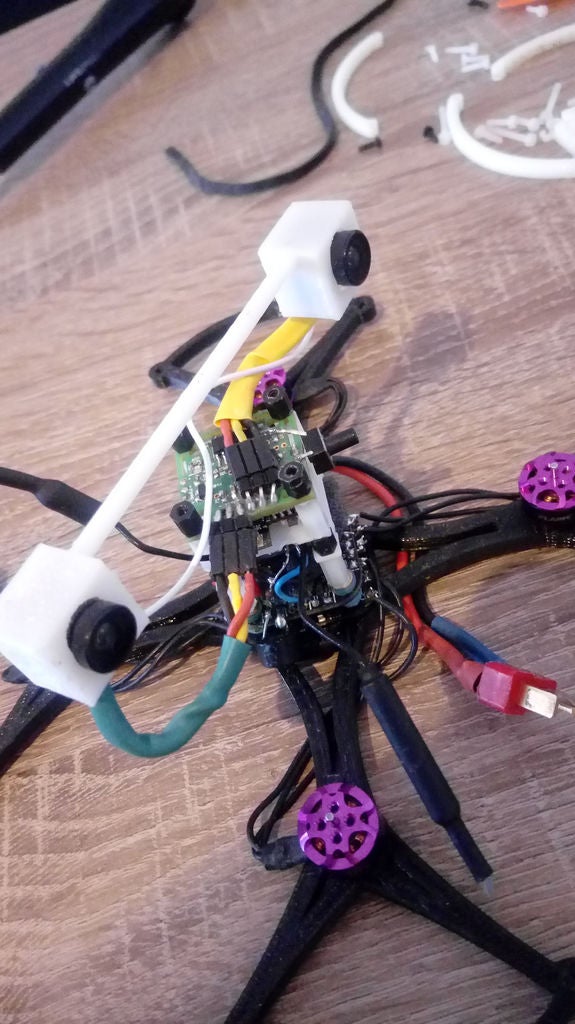
现在将三维凸轮的电路板放在上面并再放一些短垫片。 (第六张和第七张图片)
最后一张是3d打印的凸轮盘。首先放入一些长螺钉,如第八张图片,然后将其固定在顶部并用凸轮架固定两个摄像机。
现在你的直升机差不多完成了。我们进行调整。
步骤6:配置Betaflight

现在是时候进行配置了。如果您尚未安装betaflight配置程序,请从此处下载并安装它。 Fore Baro模式您必须安装并清除Cleanflight。 Betaflight不支持它。
通过USB将飞行控制器连接到计算机并启动betaflight配置器。点击连接。
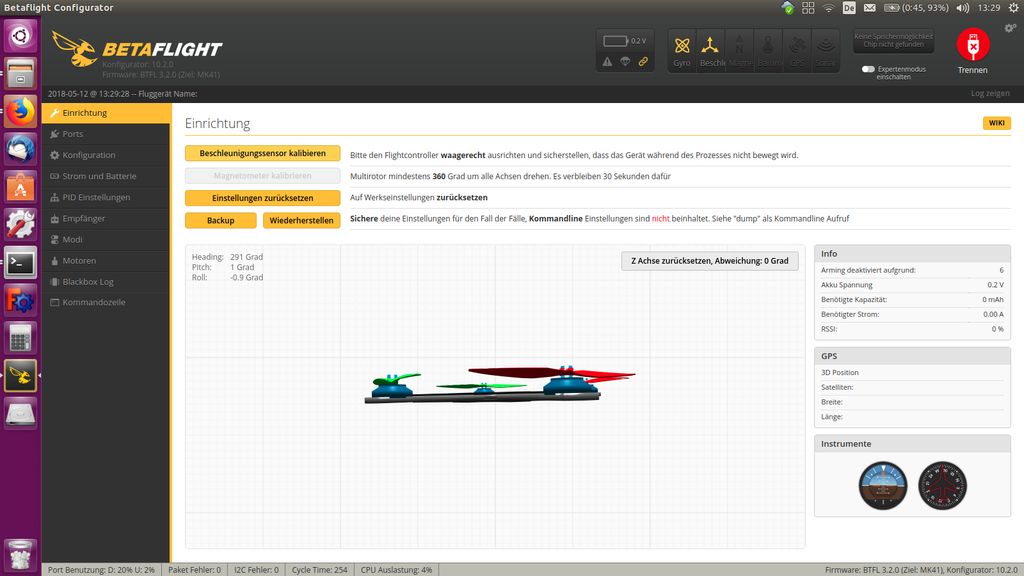
在第一个标签中,您可以调整传感器。要执行此操作,请调平直升机并单击校准。
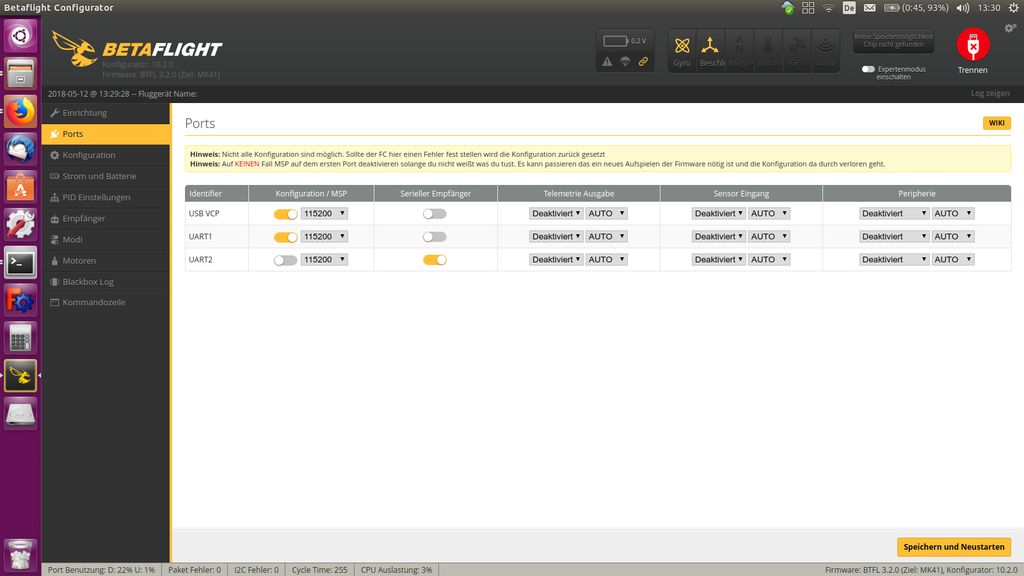
在第二个选项卡中,您可以配置串行端口。保持USB端口不变。将UART2设置为串行接收器。你可以像现在这样离开UART1。我把它调整为MSP,因为我现在正在使用MSP协议进行一些测试。
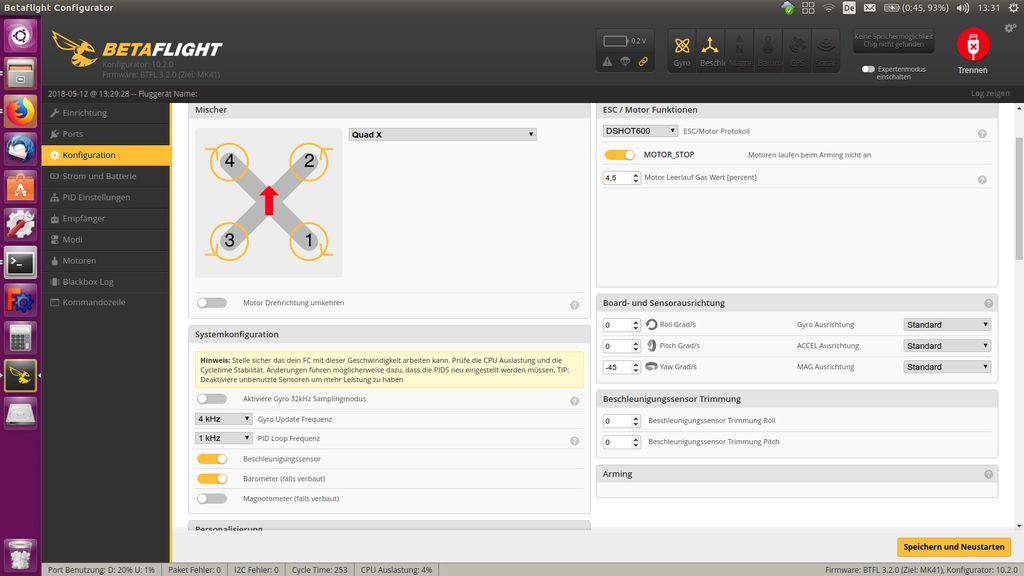
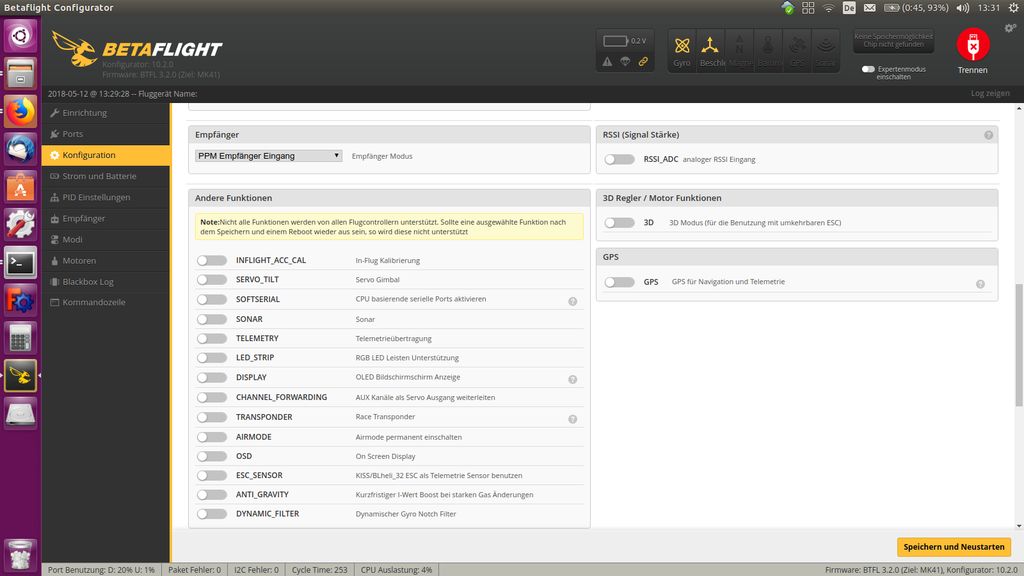
在下一个选项卡中,您可以配置直升机。把它放到Quad X和DShot600上。我总是打开电机停止,因为我希望在没有油门的情况下关闭电机。您还必须将电路板方向调整为YAW -45°。接收器必须调整到PPM接收器。您可以保留其余部分。
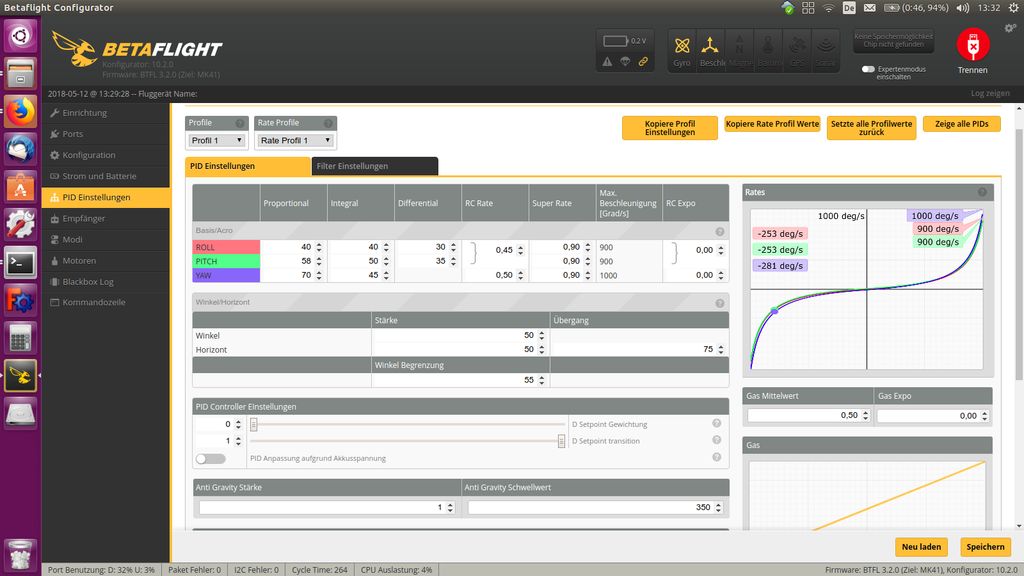
在PID选项卡中,您可以调整PID参数和杆的灵敏度。我稍微降低了灵敏度。 PID调整应适用于第一次飞行。您可以稍后对其进行优化。
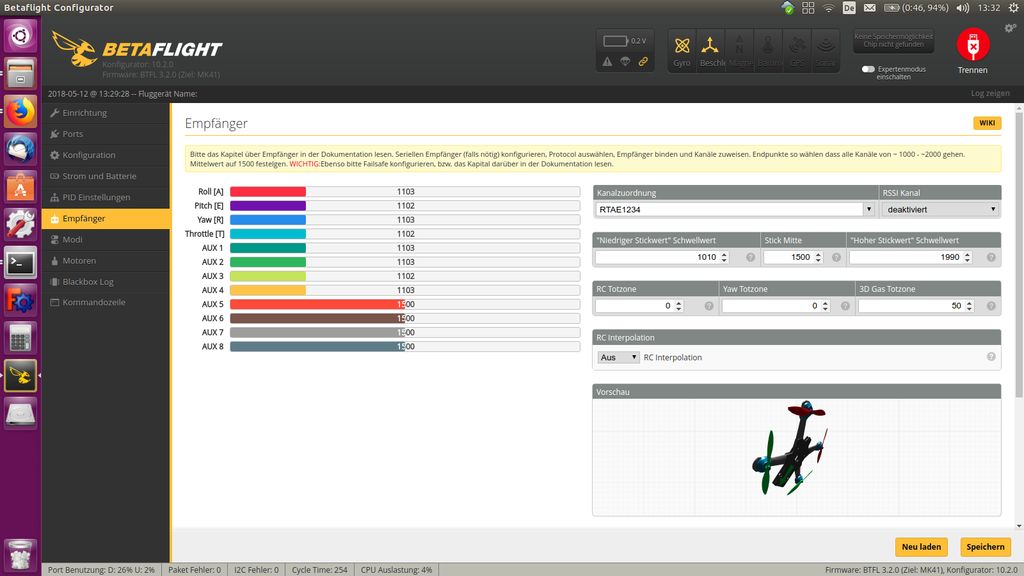
下一个选项卡是接收器选项卡。将通道映射调整为RTAE1234。将最低粘贴值调整为1010,将中心粘贴值调整为1500,将最高粘贴值调整为1990.如果您将智能手机连接到WIFIPPM并在浏览器中加载地址192.168.4.1,则可以测试您的接收器。
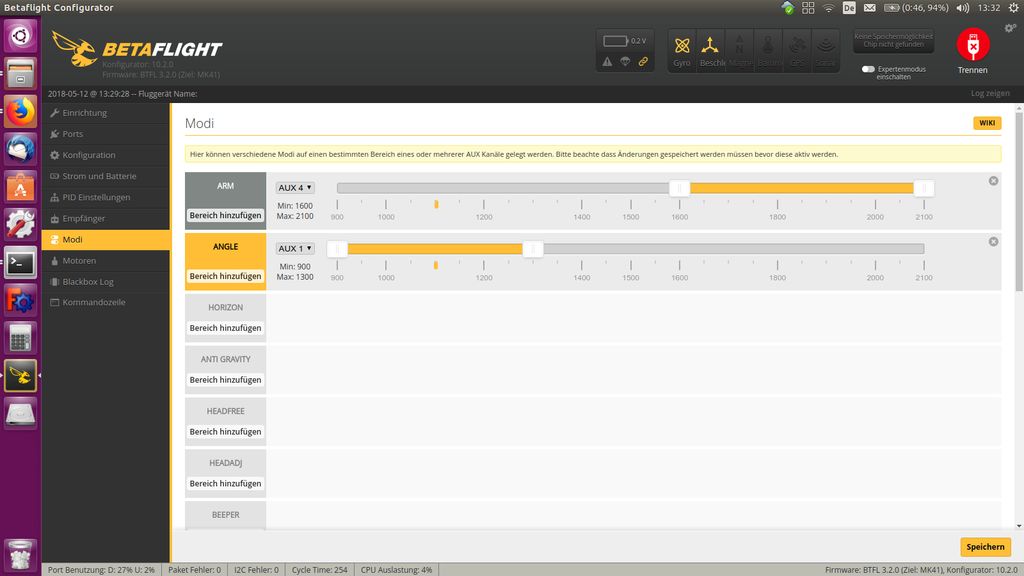
如果接收器工作正常,您可以进入“模式”选项卡。我已经在AUX4和AUX1上的飞行模式下布防了。我还在AUX3上调整了Baro模式(只有清洁飞行,必须连接电池才能识别baro传感器)
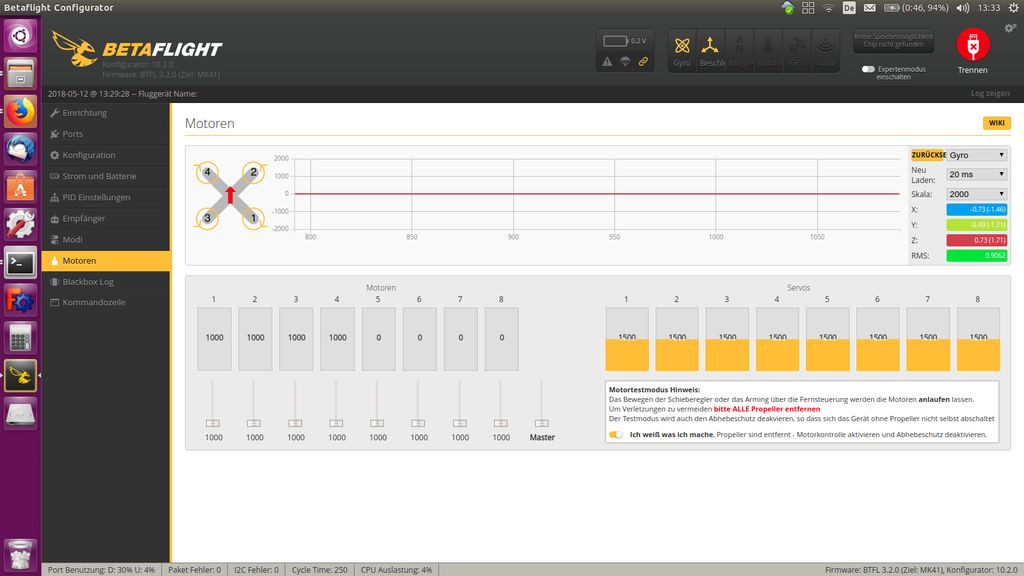
现在转到电机选项卡。插上电池并点击“我知道我在做什么”。测试电机的方向。它应该像左上角的图表一样。如果电机方向错误,请拔下电池插头,断开USB电缆并更换电机的两根电线。然后再试一次。当电机方向正常时,配置完成。
步骤7:测试你的直升机

现在你可以添加螺旋桨,橡胶带,以保持电池和支柱防护。再次仔细检查所有内容并连接电池。连接到WIFIPPM并尝试先飞行而不使用FPV。然后再次检查视频流是否正在使用电机。如果您有电机的视频失真,请再次检查接线。尝试将3d fpv相机的所有电线尽可能远离电源线。当一切正常时,你可以开始FPV飞行。
-
四轴飞行器
+关注
关注
55文章
207浏览量
52837
发布评论请先 登录
Flymaple V1.1:高性能四轴飞行器控制器板
四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现

分布式推进垂直起降飞行器过渡走廊参数敏感性分析与总体设计优化导向研究

震有科技联合发布首款168桨智能飞行器
芯片电感/半导体模组磁性元器件在低空飞行器领域的应用范围及其作用
低空飞行器(如eVTOL、物流无人机、城市空中交通飞行器)的适航认证

浙江锋锂低空飞行器电池解决方案亮相2025亚洲通用航空展
第四届飞行器健康管理技术国际高端论坛暨青年科学家论坛:昊衡科技,欢迎您来!


深圳反重力科技纯电动单人智能飞行器完成首次试飞
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?




评论