 喝水机器人的制作
喝水机器人的制作

步骤1:在3dsmax中设计机器人3D模型
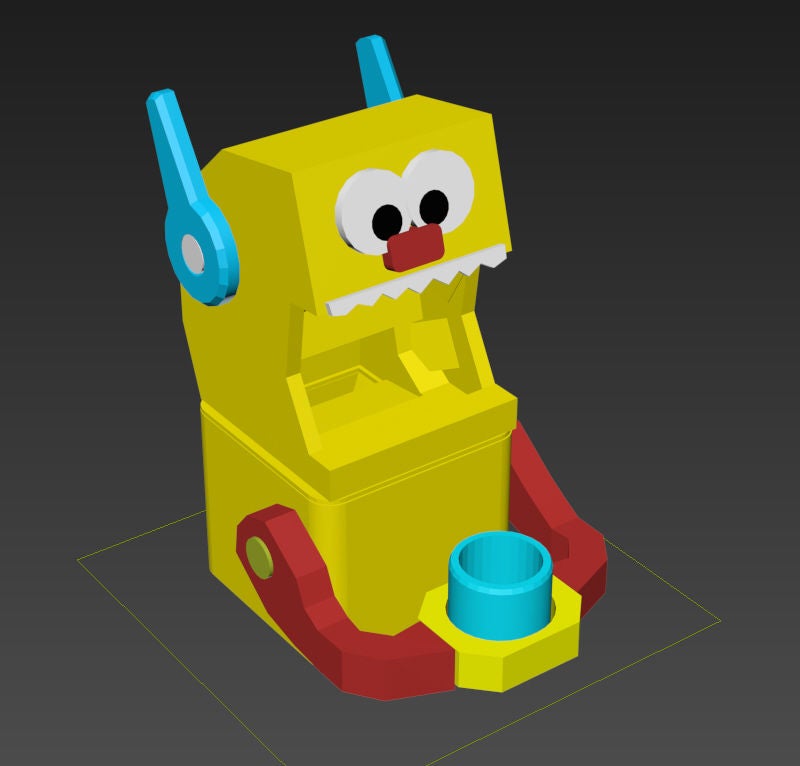
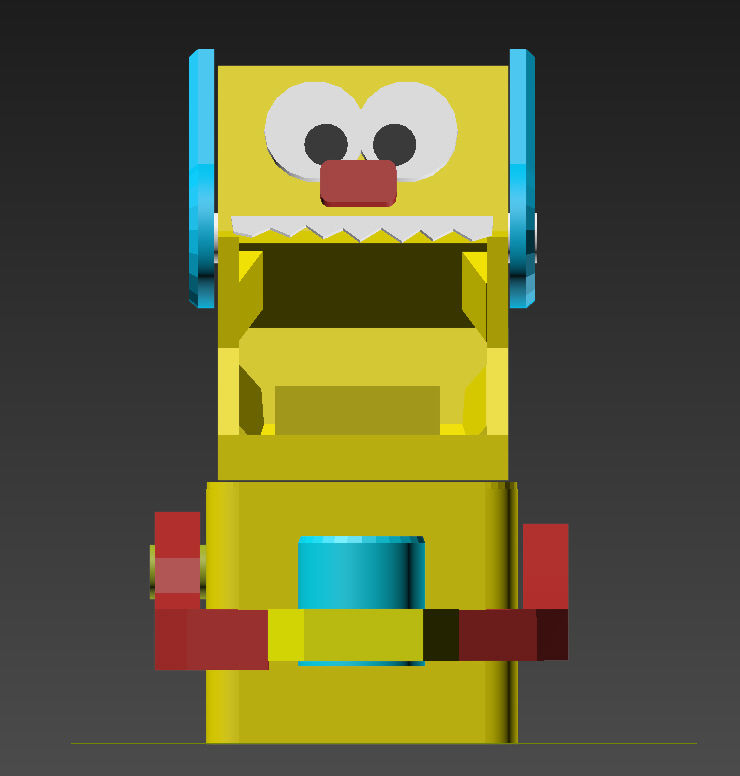
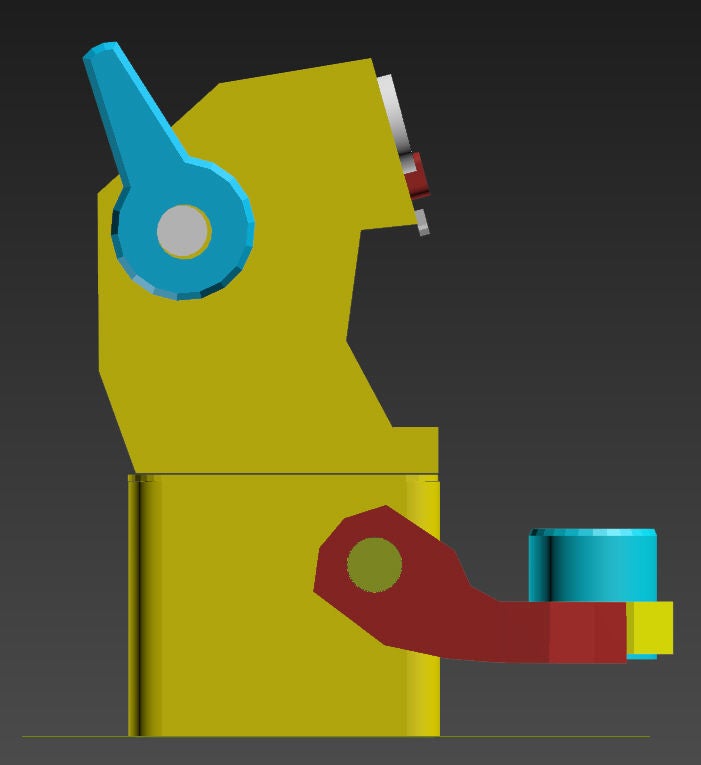
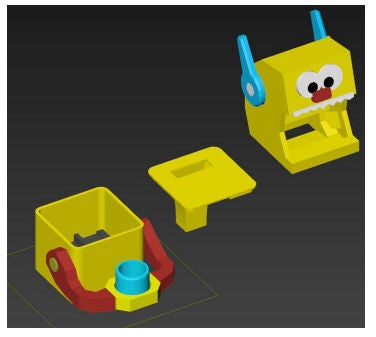
我们使用3dsmax来设计这个可爱的饮用水机器人。因为机器人会继续饮酒,为了节省时间,嘴巴总是在打开。手和手应该准确,让机器人可以将杯子放入大口,喝掉所有的水。在3d设计之后,我们可以使用3dsmax来模拟动画,让我们看看将来会发生什么。
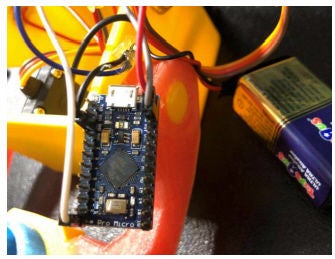
第2步:准备材料和电路图
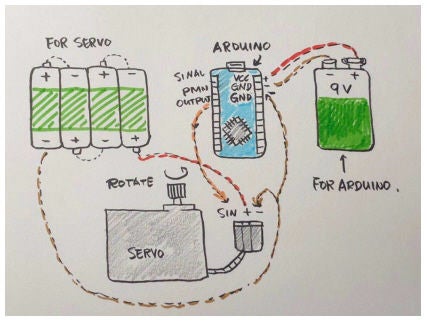
就像dino-robot风格一样,我们需要简单的材料来制作
机器人。我们需要准备如下材料:
(1)四个1.5v电池和电池盒,它是伺服电源。
(2)一个9v电池用于arduino
(3)一个arduino mini usb,适合装在小盒子里。
(4)一个90度或180度伺服
(5)电线,烙铁和胶枪。
(6)两个开关一个用于arduino,一个用于伺服。
(7)3d打印机
这个基本电路图是如图所示。
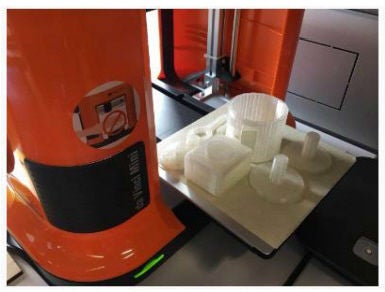
步骤3:3d打印所有部件
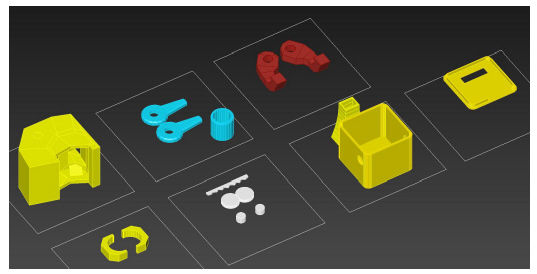
In 3dsmax我们按颜色分开
所有部分。使用3d打印机以不同颜色打印出来。
步骤4:使用胶枪粘贴所有部件


我们使用胶枪粘合所有连接部件。如图所示。这里是机器人头部的制作程序,头部连接到管道。电机伺服仅控制右手,左手跟随右手。伺服器粘在机器人的箱体上。 4x1.5v电池是机器人的背包。 9v电池和arduino板在盒体中。在我们使用胶水之后,情况显示为照片。
步骤5:为Arduino编写代码
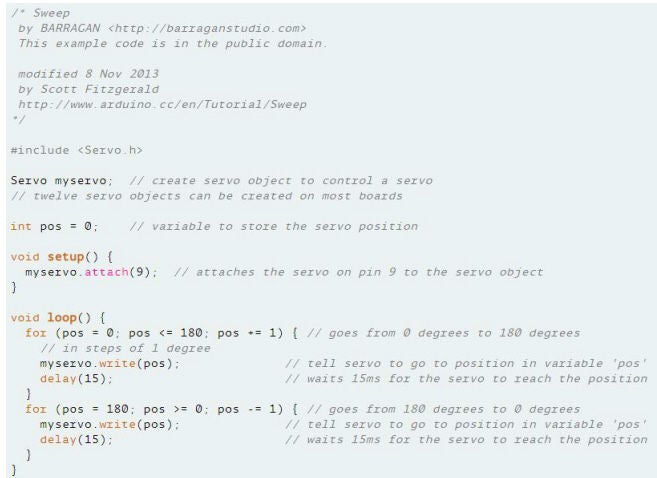
编写arduino的代码,这段代码是可以控制伺服的经典代码
。简单!
步骤6:打开开关


打开开关,它移动!饮用
机器人将继续饮用水。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31442浏览量
223644
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外界的力量,动作僵硬、笨拙,甚至危险。
核心原因:让机
发表于 04-17 17:27
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
2026年马年春晚四家机器人公司:宇树、魔法原子、银河通用、松延动力的高动态、高精度、高可靠表现,背后离不开低温烧结银在电机驱动、传感器
发表于 02-17 14:07
探索RISC-V在机器人领域的潜力
探索RISC-V在机器人领域的潜力
测评人:洄溯
测评时间: 2025年11月
测评对象: MUSE Pi Pro开发板(基于进迭时空K1系列高性能RISC-V CPU)
一、 开篇引言
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
什么是机器人?追溯机器人技术的演变和未来
作者: Aswin S Babu 什么是机器人? 在日常生活里,“机器人”一词我们都不陌生,日常交谈中也常常脱口而出。但大家可曾细想过,这个词的真正含义究竟为何?接下来,不妨花些时间,深入探究机器人

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉淀,为不同需求的企业提供适配的机器人解决方案

明远智睿SSD2351开发板:语音机器人领域的变革力量
在人工智能快速发展的今天,语音机器人逐渐成为人们生活和工作中的得力助手。明远智睿SSD2351开发板凭借强大性能与丰富功能,为语音机器人的发展注入新动力,成为该领域的变革力量。 SSD2351开发板
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我的心得体会
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating System 2)这一先进机器人开发框架的实用指南。随着
发表于 04-27 11:24



评论