 mBot教育机器人套件演示
mBot教育机器人套件演示

mBot 是一款教育机器人套件,适合初学者获得有关图形编程,电子设备和机器人的实践经验。它是机器人学习的一体化解决方案,专为STEM教育而设计。
第1步:部分列表
机械零件
1 *金属底板
2 * TT减速电机
2 *轮
2 *轮胎
1 *塑料万向轮
1 *魔术胶带20 * 30mm
6 *黄铜螺柱M4 * 25
14 *内六角螺钉M4 * 8
6 *螺母M4
4 * Nut M3
4 * Philip‘s Head Screw M3 * 25
2 *自攻螺钉M2.2 * 9.5
步骤2:电子模块
1 *基于Arduino的控制板
1 * Me超声波传感器V3.0
1 * Me Line Follower V2.2
1 * Bluetooth
1 *电池座(4) AA
4 * RJ25电缆
1 * USB A-Male到B-Male电缆
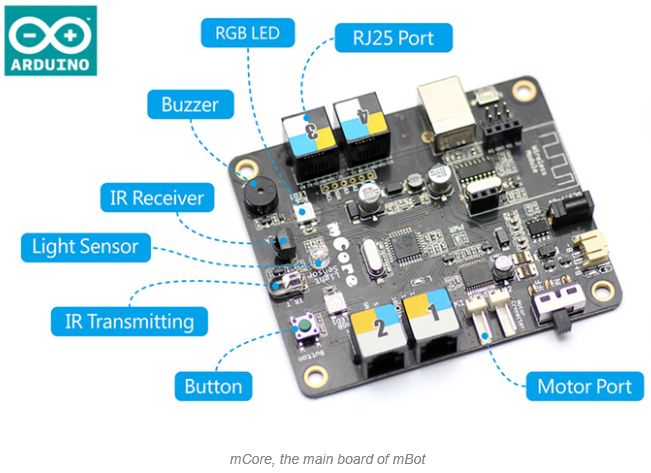
mCore主控制板
功能:
DC Power Jack
USB B型连接器
RJ25端口
RGB LED
IR接收器
红外发射器
电机端口
光传感器
步骤3:装配
首先使用螺丝将电机固定在金属底板上。然后在轮子上添加轮胎,并将两个轮子固定在金属底板的左右两侧。
然后在线跟随器模块上添加塑料万向轮并将其固定在金属底座上底板使用螺钉。
步骤4:
然后将超声波传感器模块固定在金属底板的微笑表面上,并添加四个黄铜螺柱,以便在金属底板上方支撑mCore板。
之后,使用魔术胶带连接电池支架和金属底板。
步骤5:
最后,修复上面的mCore板四个黄铜螺柱然后用RJ25电缆连接端子2和超声波传感器模块,另一个RJ25电缆用于连接端子3和线路跟随器模块。 (注意:蓝牙模块和Arduino基本控制板已经固定在mCore中了。)
组装完成10分钟后,完成一个完整的机器人车 - mBot。
步骤6:使用MBlock图形编程软件学习程序
mBlock是由MIT Media Lab开发的Scratch 2.0的免费修改版本。添加了一些基于原始Scratch的硬件相关模块,mBlock使用户可以轻松读取传感器,控制电机甚至整个机器人。
-
机器人
+关注
关注
213文章
31412浏览量
223590
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
WER 2025世锦赛暨能力风暴教育机器人高峰论坛在沪举行

探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程
NVIDIA Jetson系列开发者套件助力打造面向未来的智能机器人
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
STEVAL-ROBKIT1机器人评估套件技术解析



评论