 关于MPS助力智能娱乐机器人的性能分析和介绍
关于MPS助力智能娱乐机器人的性能分析和介绍

机器人列队那颠覆性而嚣张的舞姿相信给全国各地的观众留下深刻的印象。
本次登陆春晚舞台进行舞蹈表演的机器人的核心部件是伺服舵机系统,这款产品据说它拥有16个舵机,所以模仿起人类的骨骼肢体动作来活灵活现。
卧槽,这是要屌炸天的节奏么?看这销魂的踢腿,要不要来会儿瑜伽?
产品每一个连接处都需要一个舵机(舵机是每个关节部分的伺服电机系统),舵机电机是一个微型的伺服控制系统,多是用于航模上,可以采用无刷或者有刷直流电机作为驱动电机。
如何给这款盛气凌人的机器人提供MPS的解决方案,让我们分析一下,如下图。
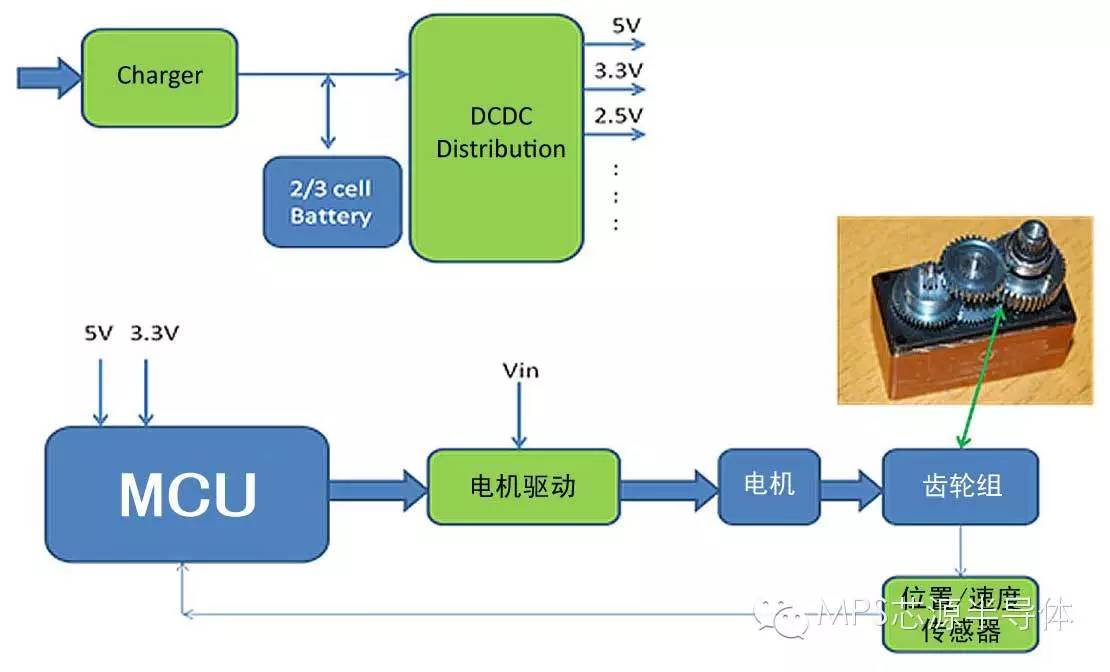
舵机的工作原理:
控制电路MCU发出控制脉冲,通过电机驱动芯片驱动电机,齿轮组将电机的转子的速度成大倍数缩小,并将电机的输出扭矩放大相应倍数,然后输出,位置/速度传感器测量舵机轴转动角度并反馈给控制电路,来控制舵机转动到目标角度或保持在目标角度。
上图中的绿色框图的部分是我们MPS的菜,其中包括电机驱动,位置传感器,充电器,DC/DC,音频放大器。
1 电机驱动 器件编号: MP6515
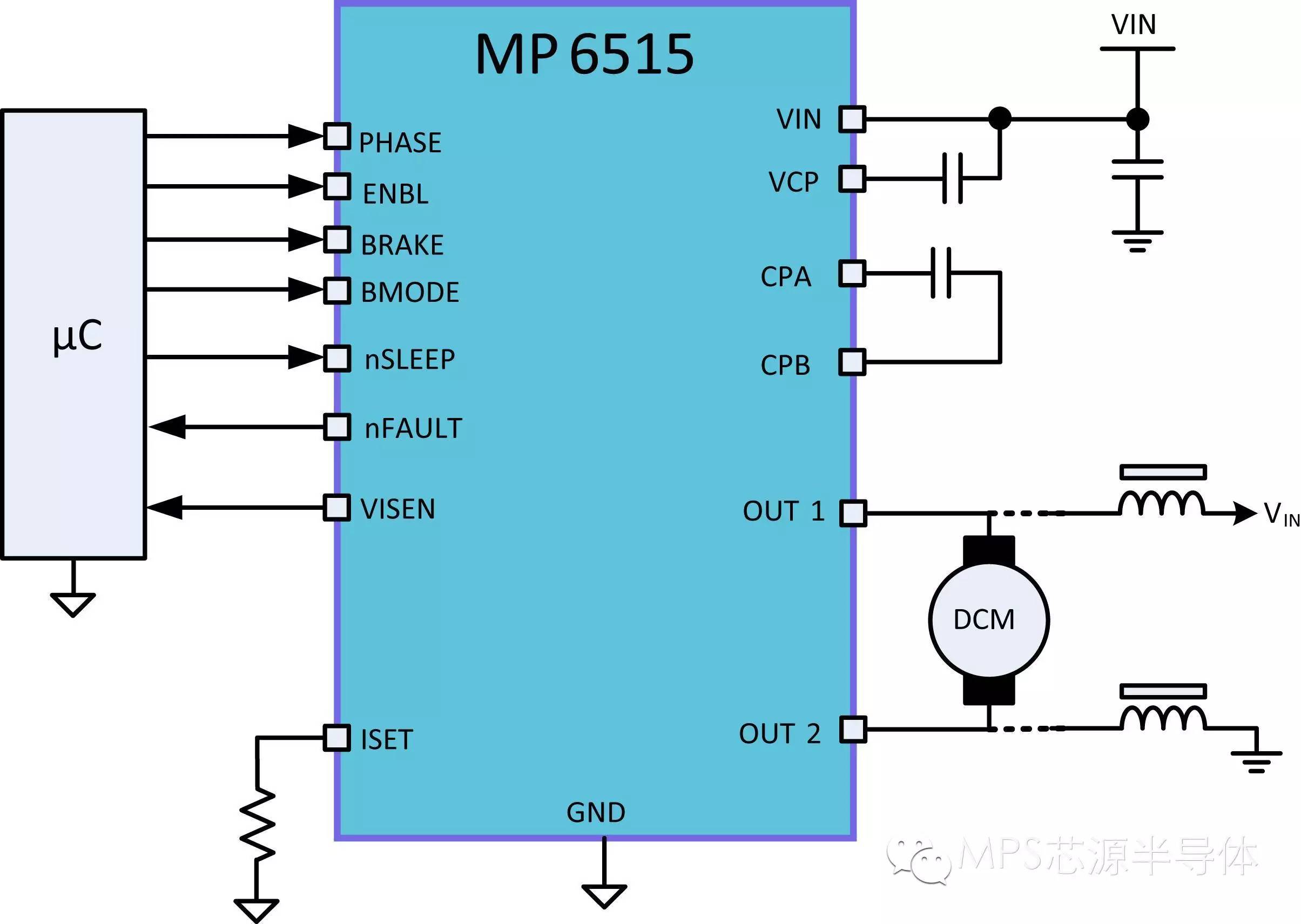
MP6515特性:
有刷直流电机驱动
5.4V至35V的电压输入范围
最大2.8A的输出电流
内部集成全桥
逐周期的电流调节方式
不需要外接shunt电阻,内部集成电流检测电路
低Rdson(HS:200mΩ;LS:200mΩ)
过流保护
输入过压保护
过热保护
输入欠压锁定
故障指示输出功能
封装TSSOP16
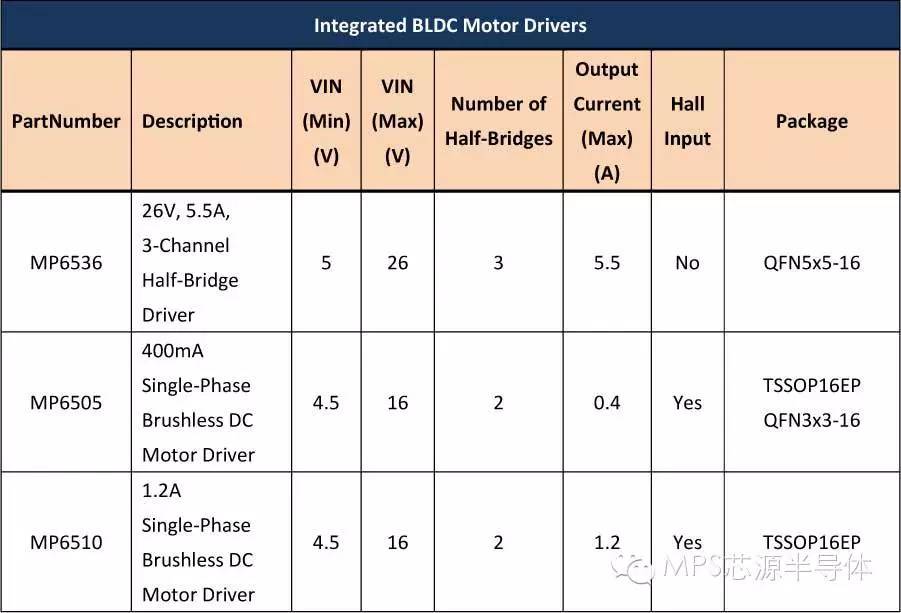
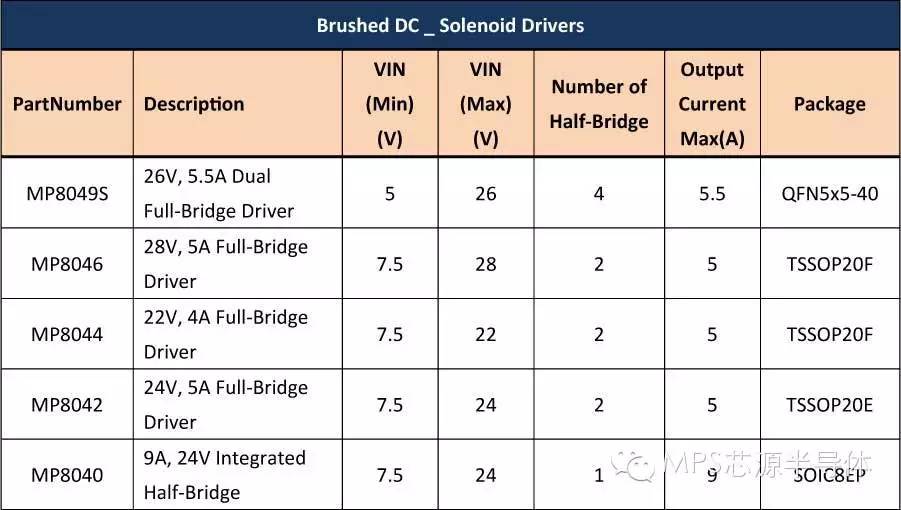
MPS还提供其他不同规格电机驱动产品供客户选择:
2 位置传感器
传统的电位器测量舵机转动角度,具有可靠性差,寿命短,功耗大,精度差等缺点。
MPS提供新的解决方案。
器件编号: MA300
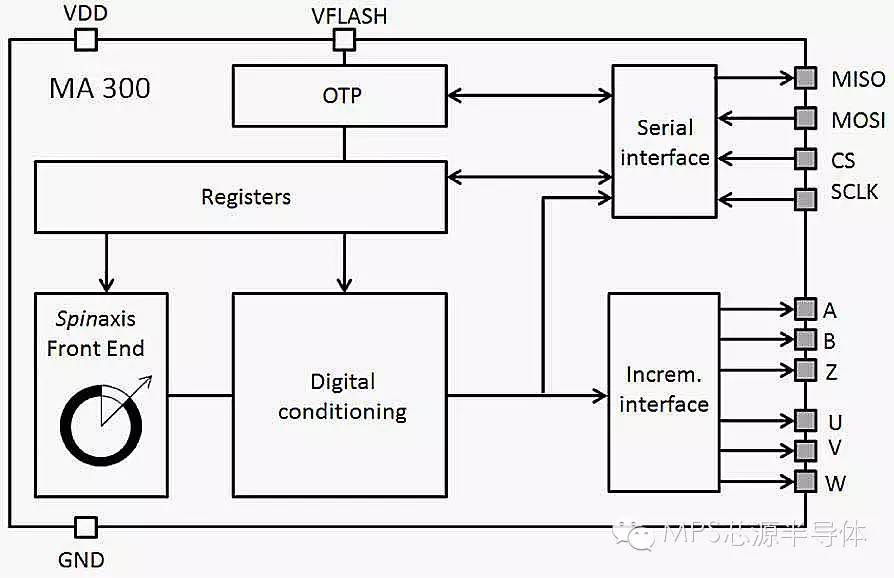
MA300特性:
3相直流无刷电机角度传感器
兼容侧轴和垂直轴安装
500KHZ的采样频率
3us的超低延迟
中等功率消耗7mA
小封装 QFN-16 3x3
SPI接口
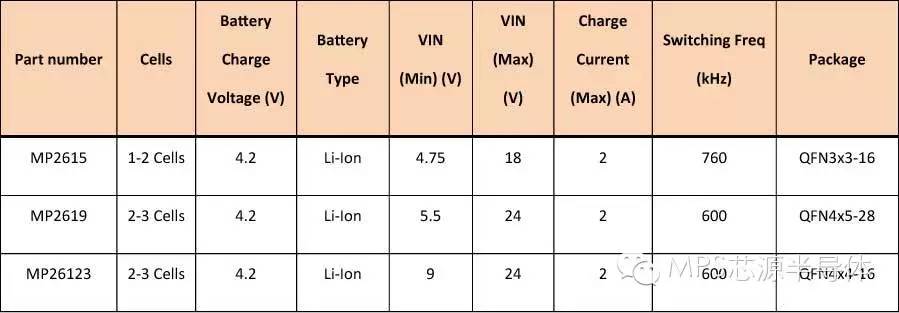
3充电器Charger
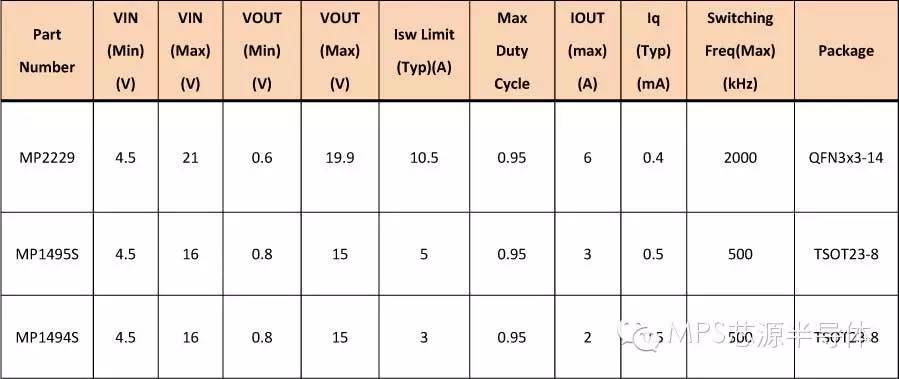
4DCDC降压变换器
为系统内部供电,MPS提供多种DCDC降压转换芯片,使系统内部得到5V/3.3V/2.5V/1.2V等电平,满足高效率,小封装,低静态电流,低纹波等要求。
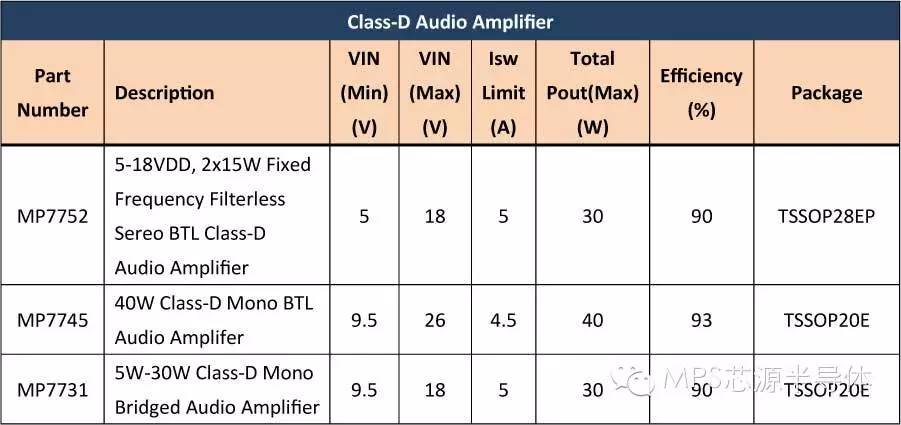
5音频放大器IC
当然,目前的机器人还应具有人机对话沟通的功能,如下表是MPS所提供的音频放大器IC。
-
传感器
+关注
关注
2577文章
55499浏览量
793922 -
放大器
+关注
关注
146文章
14362浏览量
222496 -
机器人
+关注
关注
213文章
31439浏览量
223636
发布评论请先 登录
NVIDIA Jetson系列开发者套件助力打造面向未来的智能机器人
探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升




评论