 电子发烧友App
电子发烧友App



大范围内变化。
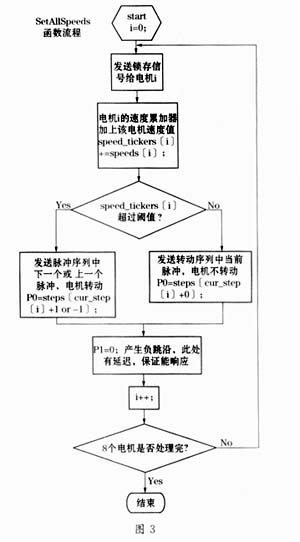
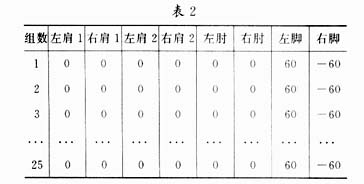
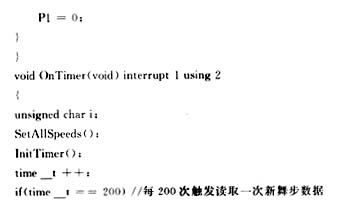
组数据(需占用1.5K存储空间,AT89C52足够)。如果人工填写这些数据,将十分困难。因此在实际的运用中,我们用C+Builder编写了机器人模拟程序,采用图形界面,预一化速度和时间信息,写入data.h,只要将其作为头文件,电机驱动程序将自动读取。


参考文献
- 电机(140403)


相关推荐
人形机器人电机用途
、力矩电机等。 伺服电机在控制精度、过载能力、速度响应等性能方面表现优异,广泛应用于工业自动化、机器人等领域,而步进电机则具备性价比优势。 二. 人形机器人电机用量 人形机器人新增更多电机需求,伺服电机和步进电机均具备适配
2023-06-25 15:18:24 438
438
438
一种新型玻窗清洁机器人的设计与实现
真空泵的控制原理与直流减速电机控制原理相同。 图3为直流减速电机及微型真空泵控制驱动模块电路,主要包括L298驱动芯片及其相关电路。 4 玻窗清洁机器人控制算法 控制系统中由应用程序来实现
2011-09-08 15:51:03
深圳泰科伺服机器人关节无刷直流伺服电机
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
深圳泰科智能机器人关节无刷直流伺服电机
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
机器人/舞台灯常用电机驱动控制芯片SS6810R
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行。机器人常用的电机主要包含三种类型:普通的直流电机、伺服电机、步进电机。
2023-04-06 17:01:47405
405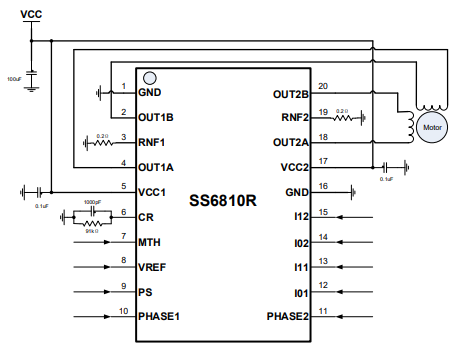
单片机应用系统设计技术——舞蹈机器人步进机
舞蹈机器人步进机一、实验目的二、实验内容三、实验步骤四、C代码如下五、实验结果六、实验体会一、实验目的舞蹈机器人集软件与硬件于一体 ,是一个比较完善的系统 ,其设计需要控制、 机械、舞蹈与音乐等
2021-11-26 20:06:10 8
8
8步进电机驱动实验(89C51 + KEIL + Proteus)
2.1 方案设计2.2 程序设计第3章 实验结果第1章 实验目的本章节主要对步进电机驱动实验的目的进行介绍,主要从实验内容和实验原理进行展开介绍。1.1 实验内容(1) 了解步进电机原理;(2) 采用任意mcu设计步进电机驱动电路;(3) 编制步进电机驱动(正反转)程序;(4) 撰写报告。1.
2021-11-20 16:06:0129
29舞蹈机器人直流电机和舵机电机驱动系统的设计方案
机器人舞蹈比赛是一项具有极强观赏性和趣味性的比赛。比赛规则要求参赛机器人在有限的场地和时间内,配合音乐完成动作。由于要求机器人既要充分利用场地,又不能超时和越界,因此,舞蹈机器人集成了多学科
2020-04-21 10:03:481238
1238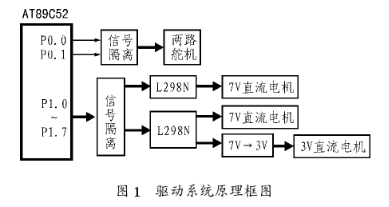
如何选择机器人电机_机器人电机选择举例
在机器人中,执行机构一般分为液压驱动和电机驱动两种类型,其中又以电机驱动最为常见。本文主要讨论一般机器人驱动机构中电机的选择问题。 机器人中常用的电机分为有刷直流电机、无刷直流电机、永磁同步电机
2018-07-11 01:27:009177
9177小型舞蹈机器人的驱动电路设计
机器人舞蹈比赛是一项具有极强观赏性和趣味性的比赛。比赛规则要求参赛机器人在有限的场地和时间内,配合音乐完成动作。由于要求机器人既要充分利用场地,又不能超时和越界,因此,舞蹈机器人集成了多学科
2014-11-18 11:18:402577
2577
基于Linux的步进电机驱动程序设计
介绍了Linux驱动程序的实现机制,在分析步进电机和驱动程序接口的基础上,给出了一个在嵌入式Linux平台上编写步进电机驱动的实例。本平台基于SAMSUNG公司的S3C2410X CPU,采用Linux2.4内核作
2011-06-15 14:22:585307
5307
基于ATmega8515L的舞蹈机器人控制系统设计与研究
娱乐 机 器 人作为机器人的一个重要分支,已经发展为一种产业。舞蹈机器人是娱乐机器人的一种,它集软件和硬件于一身,而控制系统是机器人的核心,在机器人中发挥着重
2010-08-10 15:03:3377
77基于嵌入式Linux的步进电机驱动程序设计
介绍了Linux驱动程序的实现机制,在分析步进电机和驱动程序接口的基础上,给出了一个在嵌入式Linux平台上编写步进电机驱动的实例。本平台基于Samsung公司的S3C2410X CPU,采用Linux
2010-02-21 14:20:1638
38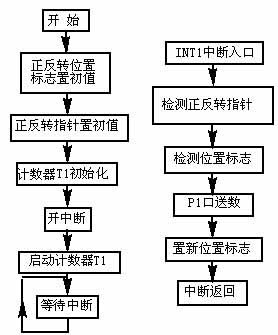
- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶:huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉:mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华:lanhu@huaqiu.com
- 投资合作
- 曾海银:zenghaiyin@huaqiu.com
- 社区合作
- 刘勇:liuyong@huaqiu.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察



版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备43011202000918 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号
- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶:huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉:mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华:lanhu@huaqiu.com
- 投资合作
- 曾海银:zenghaiyin@huaqiu.com
- 社区合作
- 刘勇:liuyong@huaqiu.com
-
关注我们的微信
-
下载发烧友APP
-
电子发烧友观察
版权所有 © 深圳华秋电子有限公司
电子发烧友 (电路图) 粤公网安备 44030402000349 号 电信与信息服务业务经营许可证:粤 B2-20160233工商网监
湘ICP备 2023018690 号
评论