 机器人/舞台灯常用电机驱动控制芯片SS6810R
机器人/舞台灯常用电机驱动控制芯片SS6810R

机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行。机器人常用的电机主要包含三种类型:普通的直流电机、伺服电机、步进电机。
目前,由于高起动转矩、大转矩、低惯量的交、直流伺服电动机在工业机器人中得到广泛应用,一般负载1000N(相当100kgf)以下的工业机器人大多采用电伺服驱动系统。所采用的关节驱动电动机主要是AC伺服电动机,步进电动机和DC伺服电动机。
其中,交流伺服电动机、直流伺服电动机、直接驱动电动机(DD)均采用位置闭环控制,一般应用于高精度、高速度的机器人驱动系统中。步进电动机驱动系统多适用于对精度、速度要求不高的小型简易机器人开环系统中。交流伺服电动机由于采用电子换向,无换向火花,在易燃易爆环境中得到了广泛的使用。机器人关节驱动电动机的功率范围一般为0.1~10kW。
工采网提供多种适应于工业自动化设备,舞台灯光,安防监控,打印机,家电的步进马达驱动芯片,多种接口方式,外围电路少,内置各种保护功能(过温,过流,过欠压保护)。这里推荐一款常用于舞台灯光控制、机器人上的电机驱动芯片。
产品描述:
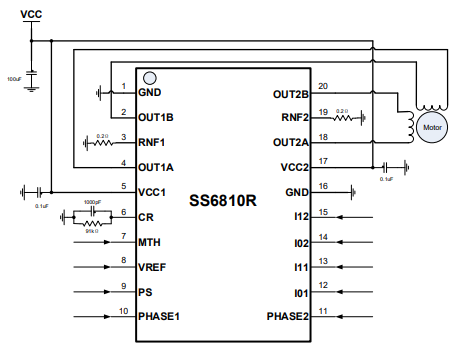
SS6810R是一款由PWM电流驱动的双极低功耗电机驱动集成芯片;采用eTSSOP20 173mil封装;工作电压范围:10V~40V;有两路H桥驱动,较大输出40V/1A。
输入接口采用Pala-IN的驱动方式,电流衰减模式可选择为快衰减、慢衰减和混合衰减,且可以任意设置快衰减与慢衰减的比例,从而更平稳高效的控制电机驱动。此外,采用单一电源供电可以有效的简化系统级设置的难度。可以有效改善散热性能,符合Rohs规范,引脚框架100%无铅。
工采网代理提供的电机驱动芯片在其领域深耕多年,技术以及产品方面已经很完善,全程提供技术。
特性:
1A电流驱动能力
工作电压范围:10V~40V
低 RDS(ON)电阻
PARA-IN 驱动模式
PWM 电流整流/限流
2bits电流控制,提供4个电流台阶
可任意设置快慢衰减比例的电流衰减模式
逻辑输入管脚内置下拉电阻
过温保护功能
过流嵌流及短路保护功能
低压保护功能
过压保护功能
应用电路;
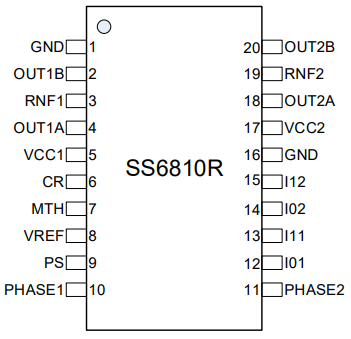
脚位定义:
审核编辑:汤梓红
-
芯片
+关注
关注
462文章
53534浏览量
459115 -
机器人
+关注
关注
213文章
30580浏览量
219575 -
步进电机
+关注
关注
152文章
3216浏览量
151559 -
伺服电机
+关注
关注
88文章
2165浏览量
60849
发布评论请先 登录
CW32L012小机器人的电机控制

人形机器人伺服电机驱动器新动力:高性能电容器的协同作用

人形机器人关节电机:永磁电机类型解析

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
轮式移动机器人电机驱动系统的研究与开发
盘点#机器人开发平台
主要人形机器人厂商的电机驱动与传感系统对比
关节电机驱动,解锁智能机器人 的“灵动” 密码

率能SS6810R_双H桥驱动芯片_步进电机驱动芯片
率能SS6810R_双H桥驱动芯片_步进电机驱动芯片

ST NPI 专区 | 新开发套件 【STEVAL-ROBKIT1】 机器人应用评估平台





 工商网监
工商网监
评论