摄像机标定是什么?如何对摄像机标定进行分类?传统摄像机标定方法分为哪些?摄像机自标定方法有哪些?
2021-04-13 06:10:19
描述此 IP 摄像机电源模块是一种高效电源解决方案,可在 1 类 PoE 功率级别实现高性能 1080p 操作。这种用在低功率 DM385-AR331 IP 摄像机中的创新电源模块依赖
2018-12-14 15:46:32
的USB摄像机主要就是高分辨率和高帧率的USB3.0以及低分辨率的USB2.0。USB摄像机的方案主要分为三类:FPGA架构,ARM架构,单片机架构。FPGA架构的USB摄像机是从机器视觉相机中发展而来,主要是由于FPGA的灵活性,能应对机器视觉对单一环境,获取较好的图像效果,同时...
2022-02-17 07:21:11
OpenMV项目旨在通过开发开源的低成本机器视觉摄像机,为业余爱好者和制造商提供机器视觉。第一代OpenMV摄像机基于STM32F ARM Cortex-M MCU和Omnivision
2020-09-29 14:49:30
变频驱动器(VFD)是工业自动化机械的重要组成部分。它们能够高效地驱动泵、风扇、传送带、计算机数控机床和机器人自动化解决方案,有助于降低工厂的总能耗。若VFD发生故障会直接导致机器停机,进而造成工厂停工和生产损失。因此,VFD的可靠性和鲁棒性是机器制造商和工厂业主的关键要求。
2019-08-09 08:13:42
摄像机模组严选主控和sensor方案,以海思和星辰主控方案为主、加上专业的索尼sensor,做成专业的摄像机模组,可选结合商汤算法,提供客户高品质模组方案。
二、主要应用市场
安防监控:实现
2025-03-21 11:28:05
各位手高,请问网络摄像机是用什么方案的?因小弟是做存储IC的,旺宏和钰创的FLASH ,想了解一下。那网络摄像头有没有,一般用多大,什么品牌!谢谢
2012-10-24 11:18:51
Dragoboard410c开发板为平台进行简单的3D视觉实验,这里我们将涉及到3D视觉中的摄像机标定、姿势估计、对极集合和3D图像中的深度地图等内容。 这篇blog主要向大家介绍摄像机标定涉及到的一些基础概念
2018-09-28 10:32:24
基于LPC2138的红外摄像机解决方案.pdf
2016-09-19 08:14:45
跟大家简单介绍下基于RK3588芯片打造360度8K全景摄像机的产品解决方案。 全景摄像机有着十分广泛的应用,全景导航、VR视频录制、智慧城市、机器人控制、辅助驾驶等场景均需使用全景摄像机。目前
2022-07-26 16:29:17
利用LABVIEW视觉模块完成摄像机标定,一般需要哪些vi?相关参数怎么设置?
2015-05-17 17:24:58
相对于传统方法有更好的灵活性和实用性,通过十多年的不懈努力,理论上的问题已基本解决,目前研究的重点是如何提高标定算法的鲁棒性以及如何很好地用这些理论来解决实际视觉问题。为了提高鲁棒性,建议更多的使用分层逐步自标定方法,并应对自标定的结果进行线性优化。
2019-06-04 08:00:00
停工和生产损失。因此,VFD的可靠性和鲁棒性是机器制造商和工厂业主的关键要求。图1所示的三相逆变器结构是VFD的核心,能够将整流后的电源电压转换为输出到电机的可变频率和可变电压。逆变器的鲁棒性是确保VFD鲁棒性的关键要素。该项技术由德州仪器研发。
2019-07-12 07:11:20
产品的好坏,由图上我们可以看到,一款摄像机都有一套完成的“方案”组成,其中最影响效果的就是CCD+DSP的品质,接下来我们就从这两方面入手有效的区分一款摄像机的好坏? 一、从摄像机CCD来区分
2011-02-23 16:38:40
产品的好坏,由图上我们可以看到,一款摄像机都有一套完成的“方案”组成,其中最影响效果的就是CCD+DSP的品质,接下来我们就从这两方面入手有效的区分一款摄像机的好坏? 一、从摄像机CCD来区分
2011-02-23 16:39:31
2.1 目标获取 目标的获取即在摄像机采集的图像中搜索是否有特定目标, 并提取目标区域, 给出目标在图像中的位置特征点。 由于机器人控制实时性的需要, 过于耗时的复杂算法是不适用的, 因此以颜色信息
2019-06-01 08:00:00
` 如今越来越多的人开始重视家庭安全问题,所以家用网络摄像机理所当然成为人们关注的焦点,这也是近年来智能摄像头越来越火的原因。如果你也担心家中的安全,家用网络摄像机无疑是一个很好的解决方案。打开
2016-03-24 17:50:28
、圆和椭圆3.9 摄像机标定3.9.1 面阵摄像机的摄像机模型3.9.2 线阵摄像机的摄像机模型3.9.3 标定过程3.9.4 从单幅图像中提取世界坐标3.9.5 摄像机参数的准确度3.10 立体
2016-06-29 13:48:38
技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像
2019-06-08 08:30:00
基于响应面快速优化、基于仿真工作流优化及可靠性优化、多级别优化、组合优化等。• 参数标定采用优化算法,自动标定仿真模型中难以确定的参数,确保与试验数据误差很小。• 可靠性和鲁棒性分析分析设计参数的不确定性
2021-07-06 14:20:10
能力也就越强。当然,灵敏度越好摄像机价格也越昂贵。有的摄像机厂家,随意提高输出信号强度,灵敏度不错,但信噪比很差,导致图像“雪花点”很多,像质恶劣。 不同规格CCD的摄像机会较大地影响到红外摄像机的图像效果
2008-08-26 10:21:28
由于网络摄像机和视频服务器拥有独立的IP地址,可支持多种网络协议,如TCP/IP、HTTP、ARP、UDP等等,因此
2008-10-06 16:59:08
第一、概念要弄清: 模拟摄像机(Camera)前端采用隔行扫描CMOS/CCD感光器将光信号转换成模拟电信号,然后输出到DSP,由DSP进行A/D转换与色彩调整等处理再做D/A转换调制成PAL
2020-12-11 14:22:45
本应用笔记介绍了安全视频监控系统中高级互联网协议(IP)摄像机与模拟摄像机的应用差异。
2021-06-02 06:36:00
对在频域中使用最不显著分量(LSB)算法进行了分析,提出了增强LSB算法鲁棒性的条件和频域LSB的两种定义,并据其构造了具有鲁棒性的LSB算法。为保证水印顽健性,对图像做8×8分
2008-12-09 02:40:10 18
18 提高加热炉温度控制鲁棒性的研究
2009-01-18 23:24:4322 研究步态跟踪的关键技术,提出一种比较鲁棒的多摄像机自校正跟踪方法,该方法结合卡尔曼滤波预测技术、标记点轨迹平滑性和多视角几何关系对标记点的运动轨迹进行跟踪。将
2009-04-11 08:52:0928 鲁棒性是数字水印的重要指标之一,本文提出将分组码,卷积码编码的数字水印应用于数字版权保护中,利用编码纠正水印误码来降低检测误码率,提高水印受到攻击的鲁棒性。
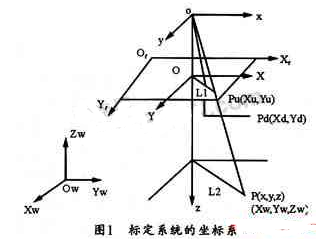
2009-06-18 10:21:2223 在计算机视觉中,二维计算机坐标和三维物体空间坐标的关系可通过摄像机模型来建立。模型中的参数包括:摄像机几何、光学特性参数(内参数)及摄像机空间位置参数(外参
2009-08-05 15:29:1641 基于视觉系统的移动机器人导航技术是近年来移动机器人研究领域的一个热点,而摄像机标定是视觉系统的基础,它建立了摄像机系统尺寸(像素)和已知的三维世界坐标系系统
2010-01-20 14:08:3738 双日视觉是计算机视觉领域的一个重要组成部分。双目视觉研究中的关键技术摄像机标定和立体匹配一直是研究的热点。本文由两部分组成,分别对双目视觉的算法和未标定图
2010-08-14 16:41:540 AI泳池溺水识别摄像机基于yolov5视觉分析训练模型算法技术,AI泳池溺水识别摄像机能够实时捕捉游泳池的画面自动分析水面人员行为。它通过yolov5模型算法能够准确识别出游泳馆泳池中游泳者的动作
2024-09-19 22:32:31
CCD 摄像机质量对网络摄像机的影响提要:网络摄象机 ( 网络摄象服务器、视频服务器、网络视频转换器等 ) 采用的 CCD 摄像机的质量对带宽的影响很大,采用优质
2008-12-29 11:23:09 933
933 网络摄像机
网络摄像机是一种结合传统摄像机与网络技术所产生的新一代摄像机,它
2010-01-07 10:17:161057 利用机器视觉的摄像机标定方法研究
机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面某
2010-03-04 10:04:541255 
以简化以往的摄像机标定技术为研究目的,分析了标定算法对于前期图像处理的要求,给出了基于MATLAB 的简易 摄像机 标定方法。该方法借助于常用软件完成了以往摄像机的标定算法中的
2011-06-13 15:52:4039 提出了基于平面单应性矩阵的摄像机标定算法,通过摄像机标定对检测区域进行网格划分,从而进行车辆速度的检测。经实验测试,该方法易于实现,且具有较高的检测精度,平均测速准确率
2011-11-10 14:35:3651 提出了一种改进标定法.该方法采用分步标定的思想,以创建的平面模板为标定物,利用共面点便可线性求解出摄像机的内外参数.建立的摄像机模型考虑了径向畸变,有利于提高标定精度
2012-04-26 15:29:2328 网络摄像机是传统摄像机与网络视频技术相结合的新一代产品,除了具备一般传统摄像机所有的图像捕捉功能外,机内还内置了数字化压缩控制器和基于WEB的操作系统,使得视频数据经
2012-05-18 11:35:023101 介绍了一种线性模型下的摄像机标定方法。在获取交通视频的基础上,利用实际路面上的参照物和图像处理的基本知识抽象出交通视频中的像素行和路面实际距离之间的几何模型,对几
2012-05-28 16:26:4743 本文介绍了一种线性模型下的摄像机标定方法。在获取交通视频的基础上,利用实际路面上的参照物和图像处理的基本知识抽象出交通视频中的像素行和路面实际距离之间的几何模型,
2012-05-29 16:58:1283 德州仪器 (TI) 的摄像机:监控模拟解决方案,电机控制算法使安全操作员能够通过操纵杆接口控制摄象机的移动。
2012-06-13 16:47:501434 
基于B-dual-space的摄像机标定
2015-11-18 16:40:220 基于整数小波变换的鲁棒零水印算法_曾文权
2017-01-03 15:24:450 一种新的估计基础矩阵的高精度鲁棒算法_张永祥
2017-01-03 15:24:450 松下IP网络摄像机解决方案
2017-01-17 19:47:0419 本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)——单目摄像机标定参数
2017-02-08 03:36:381195 )——单目摄像机标定参数说明 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定 机器视觉学习笔记(6)——双目摄像机标定参数说明 1.双目摄像机标定目的 双目摄像机标定最主要的目的就是要得出左右两个摄像机的相对位置关系,但是在OpenCV中,计算表示左右摄像机位置的矩阵R和T的同时,也可
2017-02-08 03:41:121238 软件(或软件构件)鲁棒性是衡量软件在异常输入和应力环境条件下保持正常工作能力的一种度量。鲁棒性测试主要用于测试操作系统、应用程序、COTS软件、构件及服务协议等软件和协议的可靠性及健壮性。在操作系统
2017-10-31 16:44:120 摄像机标定是机器视觉和摄像测量领域相对基础的工作,同时也是最复杂、困难的T作。摄像机标定的意义是得到立体空间中对象的几何信息,其中所使用的图像信息由双目摄像机所得。定后的双目摄像机得到的图像目标信息
2017-11-06 14:41:0530 问题,、提出一种基于双目视觉的投影仪标定算法,将投影仪视为逆向相机,利用一个辅助相机捕获投影于不同位置标定平面,确立摄像机图像与标定平面之间的对应关系,然后利用极线原理得到摄像机图像与投影仪图像之间的对应关
2017-11-06 15:30:2120 机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面 某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定
2017-11-17 17:53:3816443 
摄像机标定是三维重建时的必要步骤。传统的标定方法对设备要求高、操作繁琐,而自标定方法虽然简便,但精度不高,会严重影响三维重建的效果。因此,越来越需要一种操作简便并且精度高的自标定方法。采用SIFT
2017-11-21 15:01:163 鲁棒性的定义 鲁棒性是什么意思?头一次看到这个词的你可能会想歪(邪恶的笑脸)。但其实鲁棒性是一个专业术语,广泛应用与控制领域、信号处理领域、软件领域等。 鲁棒是Robust的音译,也就是健壮和强壮
2017-11-29 09:08:28130651 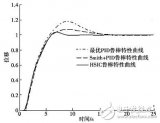
鲁棒性和稳定性都是反应控制系统抗干扰能力的参数。那么关于鲁棒性和稳定性的区别有哪些,我们先来看看两者的定义。 定义上 所谓鲁棒性,是指控制系统在一定(结构,大小)的参数摄动下,维持其它某些性能的特性
2017-11-29 09:39:44247511 平行线在视频图像中形成的消失点之间的内在关系对摄像机的焦距和俯仰角实施精确标定;在此基础上利用视频中目标车辆群体的平均宽度对摄像机与地面之间距离进行自动标定。实验表明,该算法具有参数测量精度高和可靠性好等优点
2017-11-29 16:47:580 针对无人车(UGV)自主跟随目标车辆检测过程中需要对激光雷达(LiDAR)数据和摄像机图像进行信息融合的问题,提出了一种基于梯形棋盘格标定板对激光雷达和摄像机进行联合标定的方法。首先,利用激光雷达在
2017-11-30 16:23:127 软件(或软件构件)鲁棒性是衡量软件在异常输入和应力环境条件下保持正常工作能力的一种度量。鲁棒性测试主要用于测试操作系统、应用程序、COTS软件、构件及服务协议等软件和协议的可靠性及健壮性。在操作系统
2017-12-02 09:29:105263 
基于2D的方法主要通过估计单应性矩阵,如基于运动矢量的视频去抖动算法,通过块运动估计来估算摄像机的全局运动参数。利用RANSAC算法或图像的SIFT特征匹配增强全局运动参数估计的鲁棒性。目前最先
2017-12-11 11:01:502 ,有效解决了摄像机内外参数难以直接计算,且计算精度不高的问题。方法简单有效,实现摄像机快速标定的同时保证了标定精度和可靠性,并提高了标定效率。通常情况下,当空间存在6个己知点的三维世界坐标及其计算机图像坐标
2017-12-15 11:04:185 数字摄像机包括目前市场上主流的有三种产品:网络摄像机,SDI摄像机,网线通摄像机。网络高清摄像机主要由视频采集、视频编码、网络传输等几部分组成。网络高清摄像机与模拟摄像机相比,在清晰度方面,700线
2018-01-02 15:39:1611172 针对现有基于高效视频编码的视频水印算法鲁棒性不足的问题,提出一种基于纹理方向的鲁棒视频水印算法。算法根据水印值将帧内角度预测模式分为水平方向和垂直方向两组,计算ⅣⅣ分割编码时每个预测单元 的纹理方向
2018-01-04 16:53:460 。仿真实验对比了几种典型非线性滤波方法在不同观测噪声环境下的性能。所提算法在非高斯强干扰噪声情况下,比传统鲁棒滤波算法估计精度平均提高了25.5%;估计方差平均减少了18. 3%。实验结果表明:所提算法可以抑制观测量非高斯
2018-01-25 14:33:350 领先的日光鲁棒性、扩展的温度范围和可编程的配套芯片加速紧凑和鲁棒的三维ToF相机的设计 迈来芯(Melexis为最具挑战性的环境推出一款可简化并加速实现鲁棒飞行时间(ToF)三维视觉解决方案的芯片组
2018-05-26 00:20:004113 与传统的模拟摄像机或者网络摄像机相比,智能摄像机最大的特点是具备智能分析的功能,因此,在硬件上一般会多一颗CPU芯片--DSP、ARM或者FPGA.这颗芯片负责智能摄像机内部智能分析算法的运算。
2018-10-07 07:14:005848 防暴摄像机又称高安全性摄像机、抗冲击摄像机、抗打击摄像机、防破坏型摄像机。顾名思义,防暴摄像机就是在外来暴力打击下仍然可以保证部件正常工作的摄像机,特点就是其外壳具有很强的抗冲击能力。本视频主要详细介绍了防爆摄像机安装方法。
2018-11-24 09:48:2310537 双目立体视觉中在对物体进行三维测量或精准定位时,需要对摄像机进行标定以获得其内外参数。研究径向畸变摄像机模型,构造了基于一阶径向畸变( RAC)算法的双目摄像机内外参数线性求解公式。考虑侧倾角、旋转
2018-12-27 17:04:5211 提高产品的鲁棒性TI隔离技术详探-中篇
2020-05-30 09:00:004217 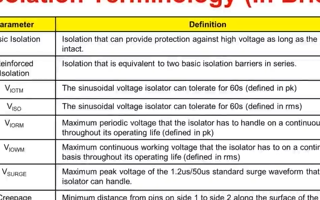
建立摄像机的模型,在Tsai方法基础上,改进算法,对摄像机的内、外部参数进行了标定。试验结果表明,该方法明显好于传统的Tsai方法,可以准确得到水平方向不确定比例因素s。再结合Tsai方法,可以准确获得其余的标定参数。
2019-10-31 16:20:055 采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
2020-08-31 10:04:125849 
智能热成像摄像机正迅速成为保护室外资产的首选入侵者检测解决方案。无论是用于保护入口或大门等较小范围的应用,还是在能源、公用事业、化学或运输资产周围确保较大的周长,红外热成像摄像机与视频分析技术配合使用均可提供一种准确的检测解决方案,该解决方案可实时提供即时通知。
2020-10-11 10:33:021966 论文中指出,以往关于ED的工作都是考虑如何提升模型的性能,而较少考虑模型的鲁棒性和泛化能力,作者将模型的鲁棒性和泛化能力定义为如下三条,并通过设计模型进行研究: 抗攻击性能:当训练数据中被加入扰动
2020-12-31 10:21:133864 视觉SLAM(Simultaneous Localization And Mapping)的关键是建立图像间鲁棒的特征点匹配关系,其决定着摄像机运动参数的求解精度和目标点三维世界坐标重建精度[1],而影响匹配效果的重要因素是特征点提取算法。
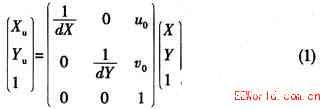
2022-09-23 10:31:031912 摄像机通过成像透镜将三维场景投影到摄像机二维像平面上,这个投影可用成像变换(即摄像机成像模型)来描述。摄像机成像模型分为线形模型和非线性模型。针孔成像模型就属于线形摄像机模型,本文就讨论在这种模型下
2022-11-07 15:22:341662 AN4299_提高触摸传感应用的传导噪声鲁棒性
2022-11-21 17:06:580 方案介绍该用于人工智能的监控摄像机解决方案搭载动态可重构处理器 (DRP) 引擎,大大提高了视觉人工智能的性能。 该系统为密码连接、语音报警和运动检测等许多增强功能提供了一个平台。 此外,该系
2022-12-15 17:06:464 一、为什么要进行摄像机标定 随着机器视觉的迅猛发展,我们已经不满足于使用摄像机进行监控、抓拍这种较为简单的功能。更多的用户青睐于它在非接触三维尺寸测量上的应用。我们所谓的三维测量是广义的三维测量
2023-06-19 10:57:042494 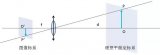
一、为什么要进行摄像机标定 随着机器视觉的迅猛发展,我们已经不满足于使用摄像机进行监控、抓拍这种较为简单的功能。更多的用户青睐于它在非接触三维尺寸测量上的应用。我们所谓的三维测量是广义的三维测量
2023-06-20 11:00:033218 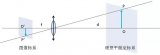
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2023-08-04 11:48:471329 
3A算法是摄像机成像控制技术中的三大自动控制算法。随着计算机视觉的迅速发展,该算法在摄像器材领域具有广泛的应用和前景。
2023-08-24 11:38:495660 
网络摄像机故障远程监控运维解决方案助力运维监控减低成本提高效率。
2021-08-23 17:00:192206 
鲁棒性(Robustness)
2023-10-16 09:50:523454 利用本质矩阵和基本矩阵的摄像机标定方法;利用主动系统控制摄像机作特定运动的自标定方法(主动视觉标定方法)。
2023-10-16 11:42:111573 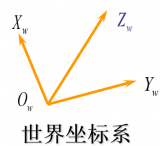
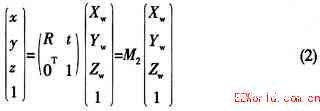
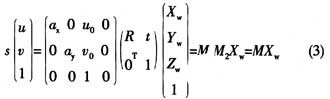
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机标定。
2023-10-19 17:31:561872 
鲁棒性的含义以及如何提高模型的鲁棒性? 什么是鲁棒性? 鲁棒性是指一个系统或模型面对输入或参数的变化时所表现出的稳定性和可靠性。在机器学习中,鲁棒性是指模型在面对输入数据的变化时能够保持稳定的表现
2023-10-29 11:21:535515 空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机标定。
2023-11-03 11:07:582528 
摄像机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成为有序的电信号。选择合适的摄像机也是机器视觉系统设计中的重要环节,摄像机的不仅是直接决定所采集到的图像分辨率、图像质量等,同时也与整全系统的运行模式直接相关。
2024-01-19 09:23:371321 
在当今的技术环境中,系统面临着各种挑战,包括硬件故障、软件缺陷、网络攻击和人为错误。鲁棒性是指系统在面对这些挑战时保持正常运行的能力。 一、定义鲁棒性 鲁棒性是指系统在面对异常输入或意外情况时,仍能
2024-11-11 10:17:394172 鲁棒性(Robustness)是指系统或方法对于外部干扰、误差或变化的稳定性和适应能力。以下是对鲁棒性分析方法的详细介绍,以及其在不同领域的应用实例。 一、鲁棒性分析方法 敏感性分析 :检验输入变化
2024-11-11 10:21:2511045 一、鲁棒性算法的基本概念 鲁棒性算法是指在面对数据中的异常值、噪声和不确定性时,仍能保持稳定性能的算法。这类算法的核心思想是提高算法对数据异常的容忍度,从而在数据质量不佳的情况下也能获得较好的结果
2024-11-11 10:22:492788 深度学习模型的鲁棒性优化是一个复杂但至关重要的任务,它涉及多个方面的技术和策略。以下是一些关键的优化方法: 一、数据预处理与增强 数据清洗 :去除数据中的噪声和异常值,这是提高模型鲁棒性的基础步骤
2024-11-11 10:25:362350 在现代控制系统的设计和分析中,鲁棒性是一个核心概念。鲁棒性指的是系统在面对模型不确定性、外部干扰和参数变化时,仍能保持性能的能力。鲁棒性原理在控制系统中的应用,旨在确保系统即使在不理想的条件下也能
2024-11-11 10:26:515447 随着科技的飞速发展,人工智能(AI)在各个领域的应用越来越广泛。在安全监控领域,AI行为识别摄像机作为一种新兴技术,正逐渐改变传统监控方式,为公共安全和商业运营提供了全新的解决方案。AI行为识别
2024-11-21 10:49:011300 
深圳南柯电子|摄像机EMC电磁兼容性测试整改:无干扰的视觉设备
2024-12-10 11:16:381334 
深圳南柯电子|摄像机EMC电磁兼容性测试整改:从问题诊断到方案
2025-02-11 15:41:301016 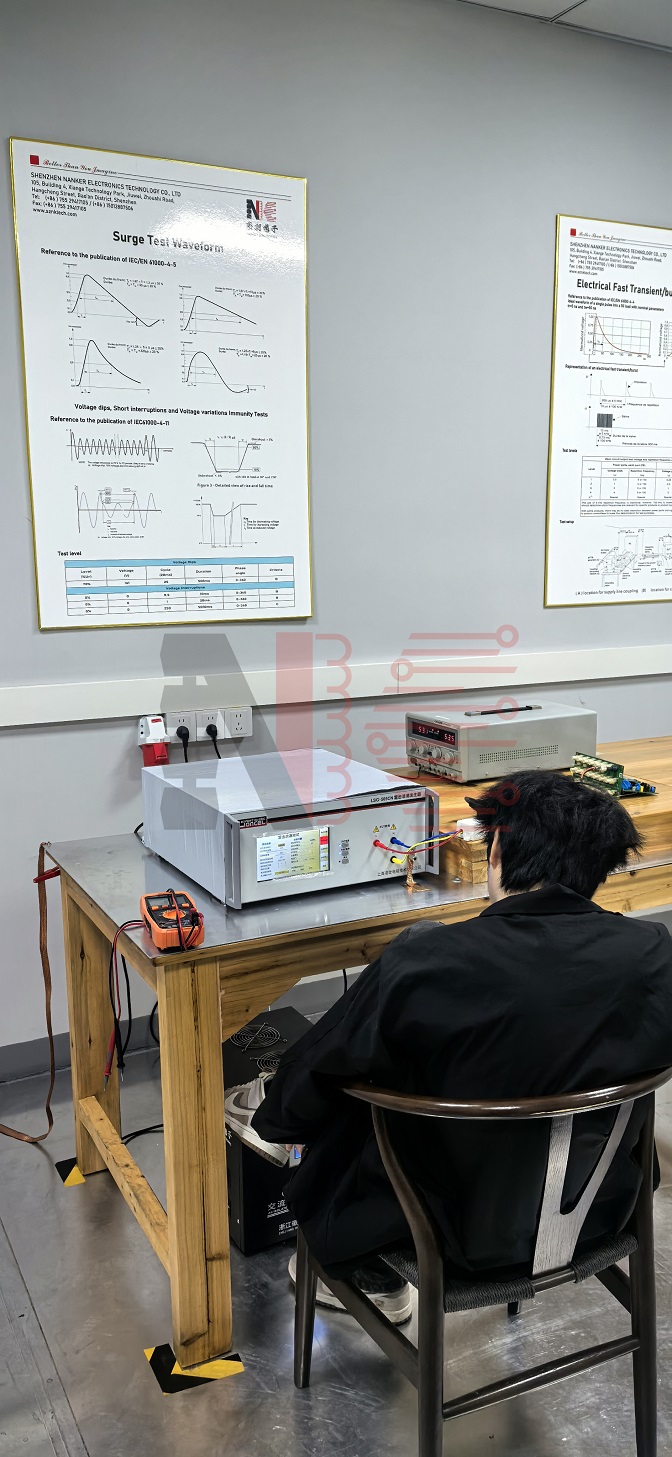
依托海康观澜大模型技术体系,海康威视将大模型能力直接部署至端侧,推出一系列视觉大模型摄像机。
2025-03-05 14:06:141328 上周,我们发布了视觉大模型系列摄像机,其中有大模型加持的周界系列摄像机,误报率下降90%以上。
2025-03-11 18:12:381664
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论