电子发烧友网站提供《基于DSP的工业机器人控制器的设计与实现.pdf》资料免费下载
2023-10-23 09:51:24 0
0 迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
。 BEAR-H系列 外骨骼机器人是全球首款采用了柔性驱动器作为动力输出的外骨骼机器人。 BEAR-H1 拥有带动力的6关节(双侧髋、膝、踝),和髋
2023-09-20 17:25:48
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
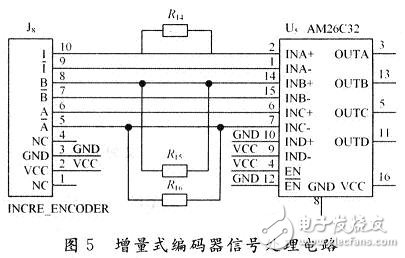
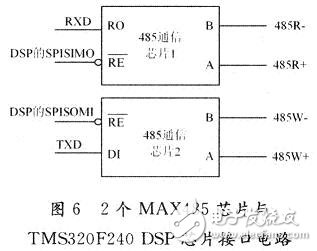
芯片TMS320L F2407A 控制器的接口电路,介绍了该芯片在多关节机器人控制系统中的使用。解码器内部具有16 位硬件计数器,与CPU 接口方便,非常适合于多轴闭环运动控制系统的开发。[hide]/replyview]
2009-12-17 16:12:31
完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。 直坐标机器人 直坐标机器人控制系统 关节机器人 关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最
2022-11-02 14:59:56 1339
1339 
主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。直坐标机器人控制系统关节机器人关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转
2022-10-27 11:19:41414 
基于DSP控制器的油气安全智能巡检机器人
2021-06-22 16:41:3637 机器人关节伺服控制系统设计与仿真
2021-06-22 14:53:1033 机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。
2021-05-28 09:11:441 在分析和研究高压巡线机器人原控制器的基础上,设计了一种基于DSP的全数字化控制器。该控制器采用主从式多处理器工作模式,用6个DSP对机器人12个关节的无刷直流电机进行伺服控制,采用高速CAN总线实现
2021-05-07 09:30:548 本课题的研究目标是以实验室已有的有四个关节和一个末端执行器的采摘机器人为控制对象,研制四关节运动控制平
2021-05-05 13:18:00903 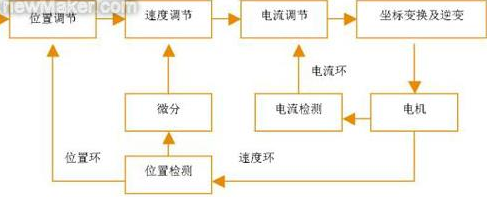
机器人控制器作为工业机器人最为核心的零部件之一,对机器人的性能起着决定性的影响,在一定程度上影响着机器人的发展。常用的机器人控制器有.
2020-08-18 16:39:115614 近日,伊朗机器人专家研发出了一种人形机器人Surena IV,能抓住水瓶还会写字,号称史上最先进的仿人机器人。
2020-02-17 09:18:32563 机器人控制器是根据指令以及传感信息控制机器人完成一定的动作或作业任务的装置,它是机器人的心脏,决定了机器人性能的优劣,从机器人控制算法的处理方式来看,可分为串行、并行两种结构类型。
2019-10-14 14:39:1410477 仿人机器人,灵活度却远超人类,快到极致是种什么感觉?一起来体验一下吧!
2019-05-30 17:43:322517 香港汉森机器人公司开发的人工智能仿人机器人索菲亚获得了阿塞拜疆的旅行签证,成为全球首个获得签证的机器人。
2018-10-31 08:43:384142 仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06:215018 的机械结构进行了设计;对机器人控制系统进行了设计,提出了一种基于DSP+ FPCJA的主控系统,将多CPU协同工作、分布式远程控制技术应用到仿人机器人行走控制中;利用人类行走过程中各关节的转动参数为输入的控制方法,在ADAMS上进行了步
2018-03-02 15:59:301 针对双臂机器人末端关节智能一体化问题,对双臂机器人末端一体化关节的控制与驱动单元进行了系统设计,对设计原理及设计方法进行了归纳分析,综合应用CAN总线技术与传感器技术,并以数字信号处理器DSP与智能
2018-02-28 14:14:260 传统的机器人运动控制器大部分是以嵌入式单片机为核心的,但其运算速度和处理能力远不能满足机器人控制系统飞速发展的需要,日益成为阻碍机器人技术进步的瓶颈。随着以电子计算机和数字电子技术为代表的现代高技术
2017-10-23 14:36:281 平台; 提出仿人机器人步态稳定控制与关节执行机构的优化; 针对运动中摆动肢体对机器人轴向影响带来的不稳定的问题,设计仿人机器人竖直轴向的角动量补偿算法。本文的主要研究工作如下: 1.搭建基于Matlab和Adams的离线仿真平台,实现机器人多连杆模型的
2017-10-18 14:31:5139 ARM嵌入式系统的拟人机器人控制器的设计
2017-10-16 08:29:1912 仿人机器人的研制开始于上世纪60年代末,只有三十多年的历史。1968年,美国的通用电气公司试制了一台叫Rig的操纵型双足步行机器人机械。它只有踝和髋两个关节,操纵者靠力反馈感觉来保持机器平衡,从而
2017-09-16 10:14:3520 仿人机器人 THBIP-I及其步态 (HumanoldrobotTHBIP,Iandits@alkinggait) 清华大学 自主研制的仿人机器人 呻 IP--重约 130kg,高 172cm,有
2017-09-16 09:14:598 特有的机械结构和数学模型,建立一个新型全数字的基于DSP和FPGA的机器人位置伺服控制系统的软、硬件平台,实现对四关节实验室机器人的精确控制。
2017-09-01 11:25:4411 仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。
2016-09-19 10:53:1947 ABB机器人的控制器电路图,很实用,需要的时候用来查阅
2016-08-09 14:52:0316 仿人机器人复杂动作设计中人——体运动数据提取及分析方法(1)
2016-05-30 15:08:132 分析了运动控制器对机器人的重要性;提出了一种高性能的基于DSP芯片的运动控制器的整体设计方案,该控制器集控制电路、数据采集模块和驱动电路于一体,能够很好的完成机器人运
2013-05-27 17:16:2577 摘要:本课题以永磁同步电机为执行电机,采用三闭环位置伺服控制方案,直轴电枢电流为0的矢量控制策略,制作了以DSP为处理器的运动控制器;采用ACPM750E为电机功率驱动模块,进行相应控制程序的设计。实验结果表明基于DSP的机器人关节控制器的运动误差在0.5%
2011-02-26 00:11:5954 仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。
2011-01-23 16:42:371249 
智能控制器在机器人机械手位置控制中的应用
以JJR-1型教学机器人为基础描述了智能控制器在机械手定位控制中的应用。对机器人机械手的肴关节进行了测试
2010-04-02 10:51:4531 本文提出了一种模糊神经网络控制器,该控制器用于工业机器人关节驱动的位置控制,克服了传统PID很难达到对非线性以及不确定因素的控制效果和简单模糊控制不能完全消除稳态
2010-03-03 15:14:5718 完全自主型仿人机器人成为首个参加RoboCup的仿人机器人
用NI LabVIEW开
2010-02-23 10:56:341085 针对复杂环境下仿人机器人稳定控制的要求,设计了基于MEMS 惯性传感器的仿人机器人足部姿态实时感知系统。同时,提出了基于惯性传感器和足部力传感器信息的系统累积误
2010-01-20 14:09:3537 根据智能机器人的控制要求,提出了机器人控制系统的顶层核心控制器和底层运动控制器的双层结构,底层与顶层基于CAN 总线完成关节状态信息的上传和运动指令的下达。在此基础
2009-12-16 16:39:4029 基于DSP仿人机器人关节控制器设计
0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,
2009-11-24 09:36:491115 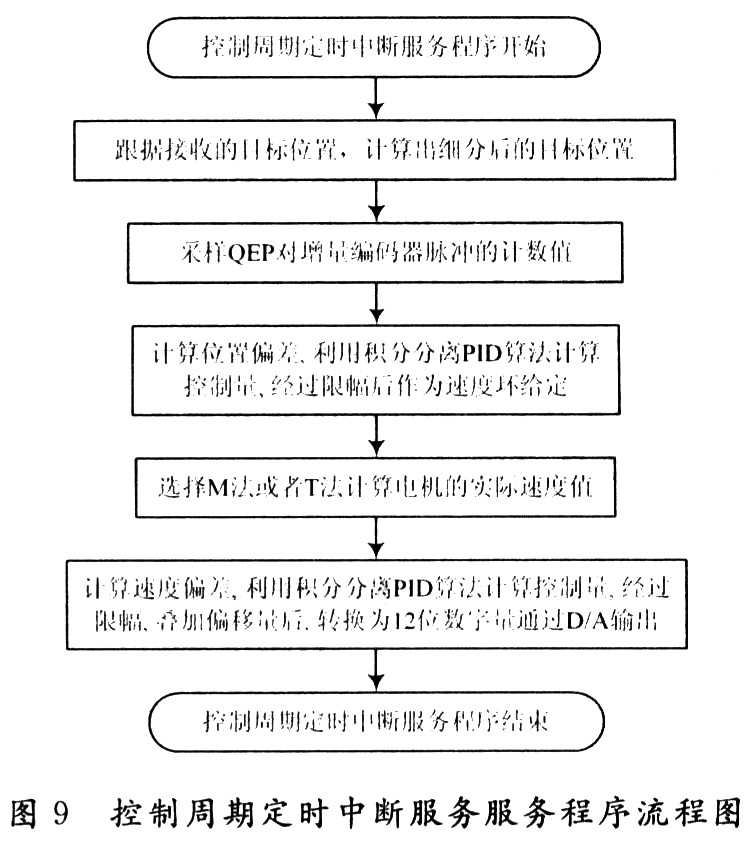
基于ARM9的嵌入式仿人机器人传感器系统设计
0 引 言 传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一
2009-11-10 09:29:52920 
基于CAN总线和双传感器仿人机器人运动控制系统研究
机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感
2009-10-10 08:57:29761 
论述了由嵌入式计算机组成的3 层仿人机器人控制系统,并详细介绍了其中的关节控制器。控制系统实行逐级控制,任务分散,提高了机器人的智能化程度。关节控制器选用TM320F2811
2009-08-05 10:51:4424 本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
2009-05-25 15:57:4445
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论