仿人机器人步态补偿算法介绍与分析
仿人机器人 THBIP-I及其步态 (HumanoldrobotTHBIP,Iandits@alkinggait)’ 清华大学 自主研制的仿人机器人 呻 IP--重约 130kg,高 172cm,有 32个主要自由度,包括6x2=12 个自由度的双腿、6×2=12个自由度的双臂 4×2= 8个自由度的双手等,此外头部有 2个主自由度和 5 个手动调节双眼自由度.它装备有直流电源和一系列肢体姿态检测装置(包括六维力/力矩传感器、三轴陀螺仪及三轴加速度计),腿部各关节设计运动范围大,可实现较复杂的动作,如下蹲、转弯、跨障和上下台阶等运动,上肢可实现点头 摇头、抓握水杯等运动 .根据清华大学仿人机器人样机THBIP—I的实际结构,把机器人分为 15个大小不同的质量块,每个质量块上均有与之固结的刚体坐标系来表示它的方位和朝向,除支撑足质量块与地面保持静止,其他 l4个质量块的结体坐标系的原点都在仿人机器人的运动关节上,如图1所示,Z轴是该自由度的转动轴,x轴指向下一个自由度,坐标系满足右手规则;前后依次的两个坐标系的原点相对位置不变,仅发生围绕各自z轴的相对旋转.
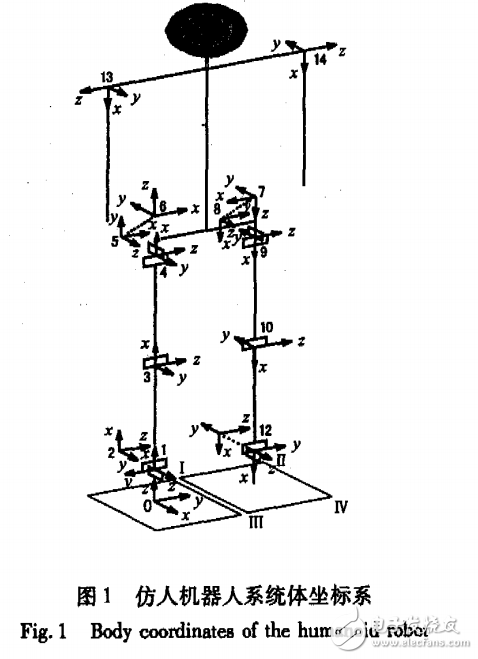
图 1 仿人机器人系统体坐标系 Fig.
1 Bodycoordinatesofthehumanoidrobot
所有转角的初始状态都如图 1中所示,满足右手转动的转角 0为正,反之为负; 和 i的正负定义与 0的正负定义保持一致.用多刚体系统动力学即可建立起其力学模型和ZMP位置表达式.根据仿人机器人 THBIP-I样机的系统描述,基于 ZMP‘稳定移动的原则,多组平地行走的步态被规划出来.现列举步态名称为 G3GA的一组步态,其步态参数为步长300ram、步态周期 8s(一个单腿支撑期和一 个双腿支撑期共耗时 8s).G3GA步态的各关节转角数据如图2中左侧部分黑色虚线所示. 3 理论步态的行走效果 (Walking~ectsof thetheoreticgaits) 将步态 G3GA用于实际的行走实验:仿人机器人行走不太稳定也不太柔顺 ,需要人在旁扶持,但扶持力不是很大,只是没有完全失稳,仿人机器人摆动足落地有比较明显的冲击现象;在单脚支撑期刚刚开始的一段时间内,摆动足没有离地,机器人出现旋转现象,左脚支撑向左拐,右脚支撑向右拐.图2左侧为仿人机器人步态 G3GA及其实际跟踪曲线,其中黑色虚线为 G3GA,即理论曲线;黑色实线为 G3GAA1,即为机器人在悬挂状态下的关节跟踪曲线 ;灰色虚线为 G3GAG1,为机器人第一次落地行走实验下的关节跟踪曲线;灰色实线为 G3GAG2,为机器人第二次落地行走实验下的关节跟踪曲线.其中 G3GAG1和 G3GAG2几乎重叠 ,说明问题是重 复出现的,系统的复现性是比较好的.图2右侧上方为仿人机器人足底六维力传感器的力测量数据,其中左足垂直方向的受力曲线为经过 F1、砚 、乃 的黑色实线 ,右足垂直方向的受力曲线为经过 E1、 、躬 的灰色虚线.图2右侧下方为仿人机器人足底六维力传感器的力矩测量数据.而机器人在步行过程中有外力的扶持 ,ZMP测量不准确 ,这里没有列举其 ZMP测量曲线.从图2中可以分析出仿人机器人在该理论步态下的行走特点. (1)仿人机器人在行走中,摆动足不能及时地抬离地面.在图2的曲线中表现为,踝关节侧摆的跟踪相应明显低于其他关节,在跟踪曲线上的图中J4 处和 B处形成非常明显的滞后;在摆动腿提离地面的过程中,在支撑踝侧摆关节上的负载突然显著增加,而踝侧摆的抗负载干扰的能力比较弱,在跟踪曲线的 J4处和 B处再次显著地 向下 ,并形成更加滞后的下凹曲线;同时,在仿人机器人的支撑髋上反映为跟踪曲线形成如 C处和 D处的超调(同时也与摆动髋和摆动踝侧摆的跟踪曲线 的误差相互影响 ).在 足
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
下载地址
仿人机器人步态补偿算法介绍与分析下载
相关电子资料下载
- 世界上首个仿人机器人飞行员PIBOT问世 365
- NVIDIA Isaac Sim机器人仿真平台上云 546
- 基于仿人机器人的多功能通用型控制系统的设计 1648
- 基于仿人机器人BHR-1的视觉跟踪和运动控制系统的设计 2163
- 面向两臂两手仿人机器人的自定义阻抗控制方法 1227
- 伊朗推出仿人机器人 能抓住水瓶还会写字 563
- 机器人行业发展迅速,仿人机器人大受欢迎 354
- 仿人机器人的发展在未来会成为一种潮流吗 802
- 仿人机器人热销 未来会成为一种时代潮流吗 2979
- 日本推出仿人机器人 缓解人们压力 3129