激光雷达的视场角(Field of View, FoV)是指激光雷达在某一时刻或一个扫描周期内,能够有效探测(发射激光并接收回波)的空间范围。你可以把它想象成激光雷达“看”东西的视野范围。
具体来说,它通常包含两个关键参数:
-
水平视场角:
- 指激光雷达在水平方向上能够覆盖的角度范围。例如:120°。
- 它决定了激光雷达在左右方向上能“看到”多宽的区域。对于自动驾驶车辆,大的水平视场角有助于更全面地感知车辆两侧的环境。
-
垂直视场角:
- 指激光雷达在垂直方向上能够覆盖的角度范围。例如:30°。
- 它决定了激光雷达在上下方向上能“看到”多高的空间。这对探测道路坡度、桥梁、交通灯、以及较近的物体(如车头前方的障碍物)或较远的目标非常重要。
总结视场角的关键点:
- 形状定义范围: 视场角共同定义了一个三维的空间区域(通常类似一个锥形或一个扇形),在这个区域内的物体才有可能被激光雷达探测到。
- 扫描机制决定: 不同激光雷达技术(如机械旋转式、MEMS微振镜式、固态Flash式、OPA相控阵式)实现视场角覆盖的方式不同。
- 重要性能参数: 视场角是衡量激光雷达感知能力的关键指标之一。它直接影响到传感器能监控多大的区域。
- 与分辨率和点云密度的关系: 大的视场角通常意味着需要更多的激光束(通道数)或者更快的扫描机制来保证足够的分辨率和点云密度,以避免远处的点过于稀疏。
- 应用影响: 视场角的选择取决于应用场景。例如:
- 自动驾驶主雷达通常需要较大的水平视场角(如120°)和适中的垂直视场角(如20°-40°)来覆盖前方和侧方道路。
- 补盲雷达可能需要超大的水平视场角(如180°甚至270°)来覆盖车辆近身盲区,但垂直视场角通常较小。
- 测绘雷达可能更关注垂直视场角的范围以适应不同地形的扫描需求。
简而言之:激光雷达视场角告诉了你这个设备能看到前面、后面、上面、下面多大的空间区域。水平角代表左右宽度,垂直角代表上下高度。 这个“视野”的大小是评估雷达感知能力的基础。
用于机器人避障的激光雷达避障传感器安装方式详解
`大多数机器人有两个车轮,北醒TF系列激光雷达视场角较小(2°~3.6°),建议使用2个雷达、分别安装在车身的左右两侧,增大探测范围和安全冗余,若机器人本身尺寸较小,也可以机身前方仅安装1个雷达
![]() BenewWake2016
2020-05-12 14:11:35
BenewWake2016
2020-05-12 14:11:35
180°大视场补盲激光雷达

2022-07-01 10:44:22
Ouster发布超宽视场角激光雷达,提供更丰富的分辨率选择
据麦姆斯咨询报道,高分辨率激光雷达传感器领先供应商Ouster近日在2020年国际消费电子展(CES 2020)上推出了两款高分辨率数字激光雷达传感器超宽视场角的OS0-128以及远程OS2-128
2020-01-29 11:23:54
如何使用BLDC电机助力机械扫描激光雷达实现360度视场
来检测物体。激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。扩大FOV的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现360度
![]() 吴与伦比
2022-11-03 07:12:38
吴与伦比
2022-11-03 07:12:38
TOF激光雷达
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
![]() PCB00025081
2019-06-07 00:03:35
PCB00025081
2019-06-07 00:03:35
360度激光雷达迎来新的契机
电子发烧友网报道(文/周凯扬)在激光雷达市场,除了冲击车规、低成本和快速量产外,追求更大的视场角、分辨率和探测距离也是比较常见的竞争方向。靠机械结构与电机旋转的机械激光雷达无疑视场角最广、精度最高
2023-02-03 02:08:00
使用BLDC电机助力机械扫描激光雷达实现360度视场

激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。
2022-03-07 14:21:35
Mobility LiDAR系列激光雷达突破固态激光雷达的局限
SOSLAB与纵慧芯光(Vertilite)并肩作战,开发出ML(Mobility LiDAR)系列激光雷达,突破了被认为固态激光雷达的局限:距离和视场角的问题,SOSLAB正在通过ML系列纯固态激光雷达加速进入全球汽车市场。
2022-08-23 14:46:43
自动驾驶激光雷达:原理、类型与应用梳理

来探测物体。白天或黑夜下的物体与车之间的距离。甚至由于反射度的不同,车道线和路面也可以区分。光束无法探测到被遮挡的物体。 2.激光雷达的关键参数 点频:每帧水平方向平均点数x垂直方向平均点数x帧率=(水平视场角/水平角分辨率)×(垂直视场角/垂直角分辨率) 扫描频率:10Hz就代表每秒扫描10次
2025-04-25 11:48:58
不只长距离和大视角,激光雷达的精度必须保障

电子发烧友网报道(文/周凯扬)在车规激光雷达这几年的发展中,由于固态与混合固态激光雷达率先上车,往往都是先从更远的探测距离、更大的视场角开始做起。可随着ADAS系统朝着更高等级进发,对高精度的追求也
2023-05-07 09:30:47
基于激光三角测距法的激光雷达原理
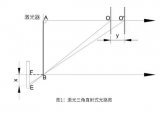
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达的硬件要求高,但测量精度比激光三角法要高得多,故多用于军事领域。而激光三角测距法因其成本低,精度满足大部分商用及民用要求,故得到了广泛关注。
2023-12-25 10:04:56
激光雷达类型:TOF雷达与三角测距雷达
如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一,按照不同的技术路线,可将机器人激光雷达分为TOF激光雷达及三角测距激光雷达两大类型。
2020-12-26 09:27:15
阐述基于激光三角测距法的激光雷达原理

激光三角测距法作为低成本的激光雷达设计方案,可获得高精度、高性价比的应用效果,并成为室内服务机器人导航的首选方案,本文将对激光雷达核心组件进行介绍并重点阐述基于激光三角测距法的激光雷达原理。
2023-12-27 18:20:33
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
![]() golabs
2021-07-22 09:12:51
golabs
2021-07-22 09:12:51
用BLDC电机来助力机械扫描激光雷达完成360度视场

的“眼睛”被称为光检测和测距(激光雷达)技术,可提供汽车周围环境的精确图像。激光雷达使用光源和传感器来检测物体。 激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于
2022-06-30 17:01:38
补盲激光雷达,照亮自动驾驶隐秘的角落
4颗激光雷达的车型可以完全覆盖车辆前、后、左、右四个方向,而3颗激光雷达的布置舍弃了后向,1颗或者2颗激光雷达的车型都将雷达布置在前向,但2颗激光雷达车型前向左右两侧的视场角要比1颗激光雷达的会更大一点。
2023-08-23 09:30:05
激光雷达知多少:从技术上讲讲未来前景
、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率; 2、抗干扰能力强:激光波长短,可发射发散角非常
![]() wayaj
2020-07-14 07:56:45
wayaj
2020-07-14 07:56:45
毫米波雷达VS激光雷达VS超声波雷达
近年来,随着雷达技术的发展和普及,科技大片中的无人驾驶离我们越来越近。全球很多中高档汽车已经开始配备汽车雷达。目前用于汽车上的雷达分为超声波雷达、毫米波雷达、激光雷达等,不同的雷达工作原理不同,性能
![]() wo97306730
2019-09-19 09:05:02
wo97306730
2019-09-19 09:05:02
最佳防护——激光雷达与安防监控解决方案
,报警主机触发监控系统录像并记录。激光雷达:激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。从工作原理上讲,与微波雷达没有根本的区别:向目标发射探测信号(激光束),然后将接收到的从目标反射
![]() ZGY15151515
2020-02-29 17:03:44
ZGY15151515
2020-02-29 17:03:44
激光雷达集成系统ILS

2024-11-28 11:25:29
激光雷达是什么,激光雷达的应用说明
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等
2022-06-20 16:53:41
补盲激光雷达,能成为智能汽车的新刚需?
方案,解决前向长距离探测的问题。 但目前从激光雷达的参数来看,由于垂直视场角的限制,比如目前某款已量产上车的激光雷达垂直视场角仅25°,在常规位置安装的前向激光雷达必然会存在一定的探测盲区,对于一些近距离的低矮
2022-11-07 07:20:04
激光雷达的基本构成 激光雷达前景分析
激光雷达的基本构成 激光雷达前景分析 激光雷达基本构成 激光雷达是利用激光信号进行测距的设备,其基本构成包括激光器、扫描机构、接收器、信号处理单元和数据输出单元。 (1)激光器:激光雷达的核心部件
2023-08-23 16:28:08
一径科技携全套固态激光雷达解决方案亮相北京车展
ML-30s是面向短距应用的大视场角MEMS激光雷达,其视场角达到140度×70度;同时其等效的线束高达160线,角度分辨率小于0.5 度。ML-30s 产品能提供宽视场角高分辨率的3D感知覆盖,将车身周边盲区危险系数降到最低。
2020-10-09 09:26:40
瑞识科技推出高功率纳秒级VCSEL激光雷达驱动板

随着激光雷达(LiDAR)量产进入新周期,「拼性能、拼可靠、拼成本」成为所有行业玩家必须面临的三重大考。作为激光雷达核心光电组成部分的激光发射端,对激光雷达的测距能力、精度、视场角、分辨率、刷新帧率
2023-07-12 11:24:35
单线激光雷达和多线激光雷达区别
单线激光雷达和多线激光雷达区别 单线激光雷达和多线激光雷达是两种常用的激光雷达技术。它们在激光的发射方式、数据采集、成像分辨率和应用场景等方面存在着很大的区别。 首先,单线激光雷达是指激光雷达只
2023-12-07 15:48:33
如何设计一款适合于果园应用的激光雷达
1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
![]() 哎呀2015
2021-11-12 08:15:02
哎呀2015
2021-11-12 08:15:02
 工商网监
工商网监


