 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
为了使机器人向右或向左移动,PID 控制器的设定点被分配了适当的值。
如果机器人之后再次直行,则必须人为抵消由此产生的步数差异,这有时会导致一些麻烦。
现在机器人只有一个 PID 控制器用于两个电机。这足以让机器人保持直立。要向前或向后移动,只需将设定值更改为适当的值。
第二个级联 PID 控制器确保机器人保持其到达的位置。
为了让机器人向右或向左移动,在没有输入到 PID 控制器的情况下,两个带相反符号的电机的步数都增加了。
现在我对机器人的行为很满意。
进一步项目手势控制机器人
原则
双轮自平衡机器人代表一个机器人平台,有两个独立驱动的轮子,重心在轮子旋转轴上方。机器人的行为类似于倒立摆的经典机械系统。
机器人特点
步进电机,单极/双极,200 步/转,42×48mm,4V,1.2A/相
步进电机驱动器载体可以连续提供每相高达 1.5 A 的电流,四种不同的步进分辨率:全步、半步、1/4 步和 1/8 步。
用于电机和位置的级联 PID 控制器
通过中断的任务分配器
脉宽调制控制器
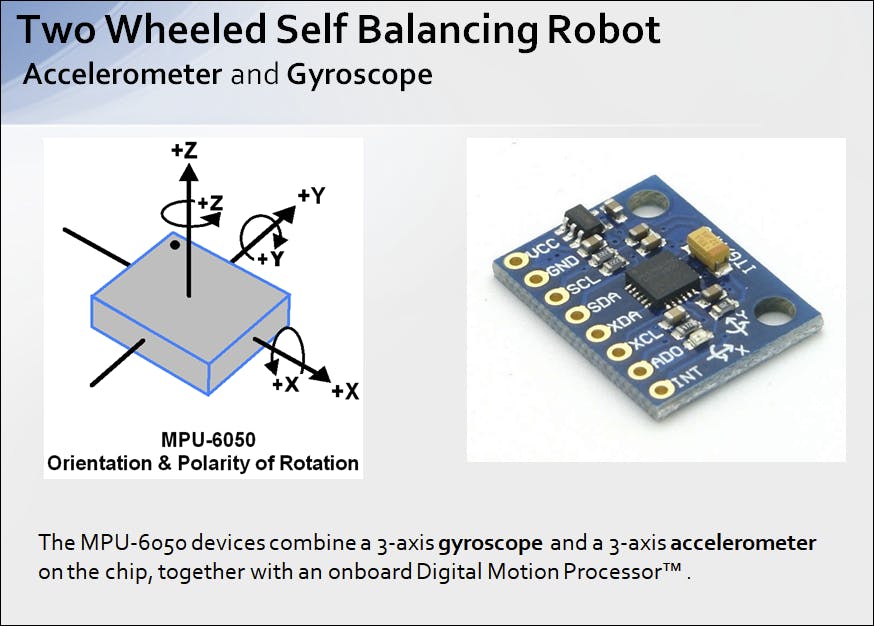
带加速度计和陀螺仪的 MPU-6050 传感器,使用带 MPU-6050 的数字运动处理
通过 Twiddle 算法自动调整
电池控制
面向对象的软件设计
限制
仅在 Arduino Due 运行
步进电机
我决定使用 Stepper 引擎,因为它们具有以下优势:
定位准确,无累积误差
静止位置保持力矩
无因电机转动惯量引起的减速/滞后
通过计算 PWM 信号进行简单的位置感测
MPU-6050加速度计+陀螺仪
MPU-6050 传感器在单个芯片中包含一个 MEMS 加速度计和一个 MEMS 陀螺仪。它非常准确,因为它包含用于每个通道的 16 位模数转换硬件。它同时捕获 x、y 和 z 通道。传感器使用 I2C 总线与 Arduino 连接。
我使用带有 MPU-6050 传感器的 DigitalMotion Processing,直接在芯片上进行快速计算。这减少了 Arduino 的负载。
https://playground.arduino.cc/Main/MPU-6050
由于我的板的方向,我使用了根据来自 FIFO 的四元数计算的偏航/俯仰/滚动角度(以度为单位)。通过阅读欧拉角,我遇到了万向节锁的问题。
MP6500步进电机驱动器载体
使用的步进电机驱动器可让您以每相高达约 1.5 A 的电流连续控制一个双极步进电机,无需散热器或强制气流(数据表)。
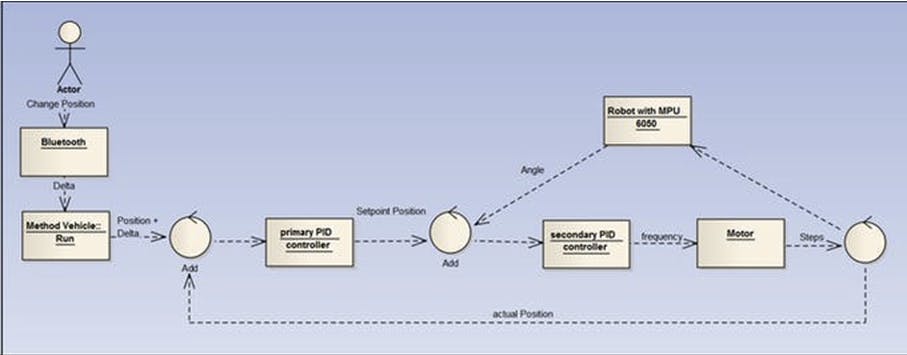
级联PID控制器
机器人由级联 PID 控制器控制。电机控制器确保机器人保持直立。位置控制器确保机器人保持其正确的设定点规定位置。
级联控制是多个控制器级联;相关的控制循环相互嵌套。一个控制器(主控制器、位置)的控制器输出变量用作另一个(从控制器、电机)的参考变量。
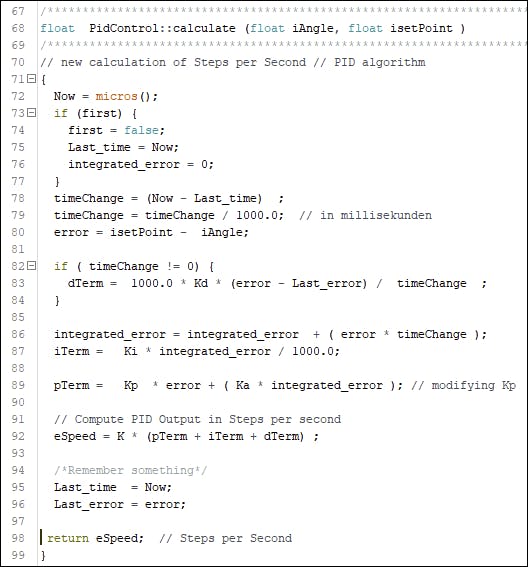
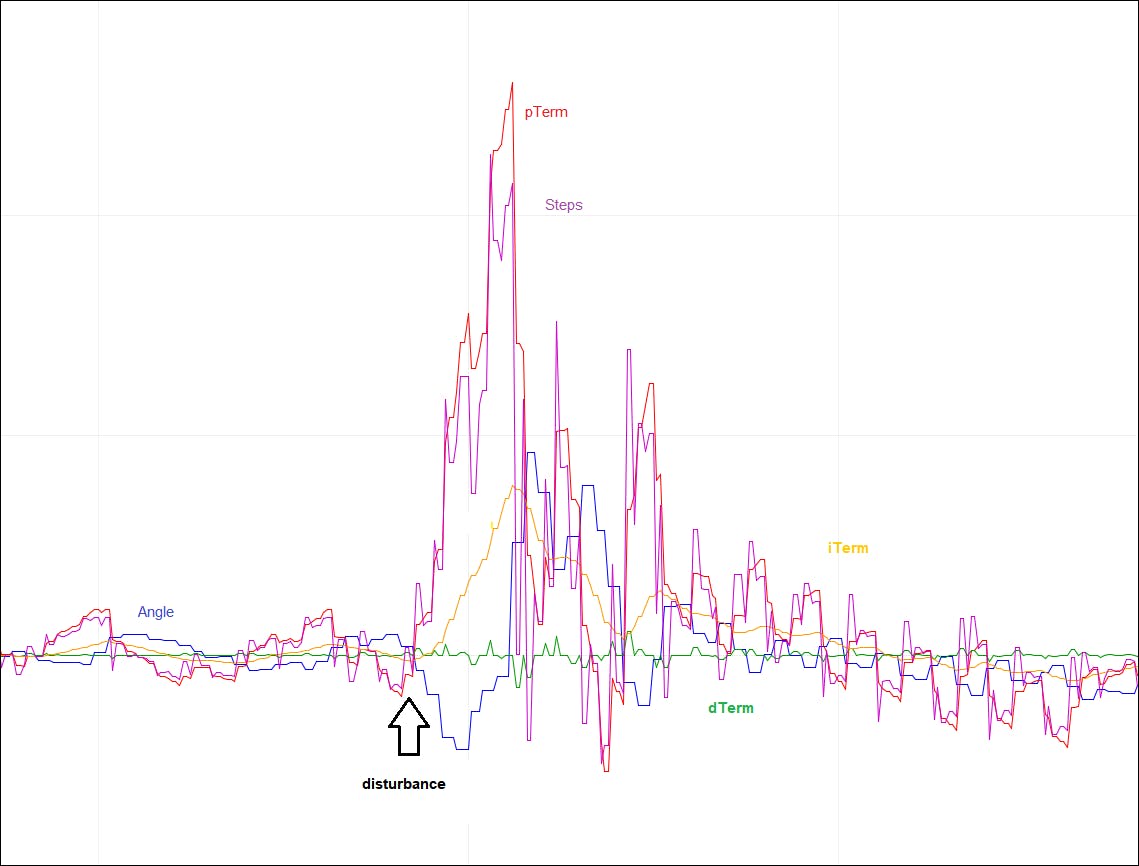
标准 PIDalgorithm 在较长的测试系列后略有修改。向 P 分量添加参数 Kx 乘以 I 分量。
在此更改之前,机器人总是想逃跑。I 部分的简单增加使机器人不稳定。这个解决方案当然在很大程度上取决于机器人的结构(重量、重心等)。

PID控制器
PID控制器
PWM控制器
为了生成 PWM 信号,我修改了“randomvibe”库。( https://github.com/cloud-rocket/DuePWM )。PWM 控制器在 DuePWMmod 类中实现。通过 PWM Clock-A (“CLKA”) 设置的独特频率) 和时钟 B ("CLKB")。
任务调度
任务派发:
机器人
液晶显示器
绘图仪
是在 Ivan Seidel 的定时器库的帮助下完成的。(https://github.com/ivanseidel/DueTimer感谢)生成三个具有相应时间的中断来调用任务。
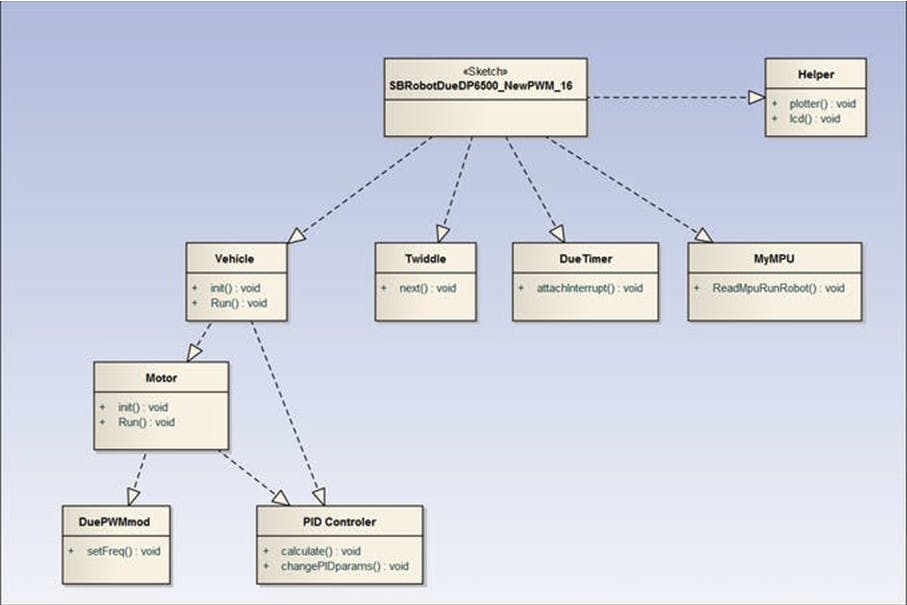
软件架构
机器人由主程序SBRobotDue02和以下类组成:
控制
电池
由于PWMmod
到期计时器
玩转
发动机
车辆
我的MPU
以及以下内容:
配置
液晶显示器
Pid参数
绘图仪
该体系结构显示在以下 UML 图中:
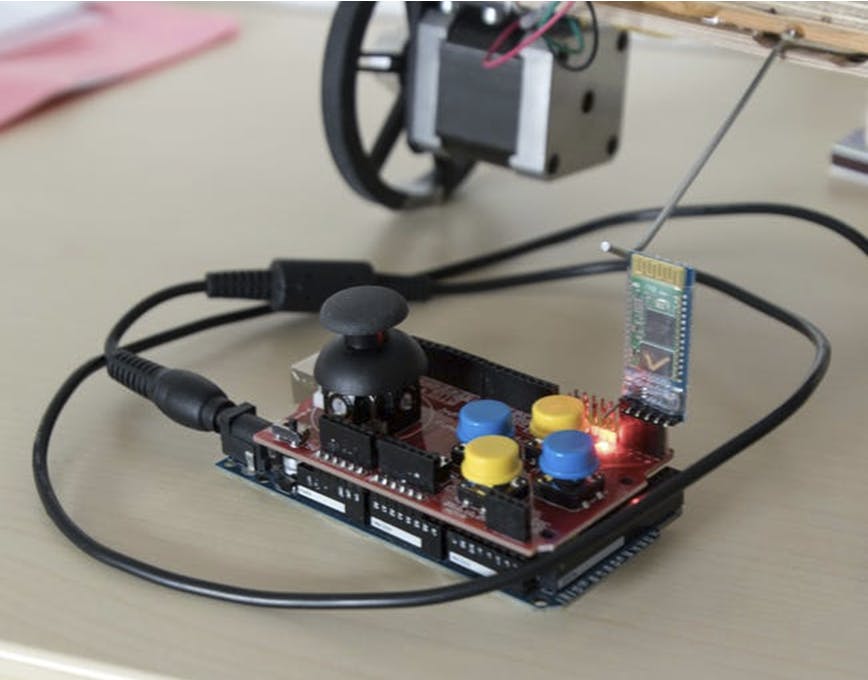
操纵杆
Funduino Joystick Shield V1.A 用于全方位控制机器人。盾牌使用的是 Arduino Mega。来自屏蔽的数据是通过蓝牙连接上的串行事件接收的。JoyStickSlave01 草图会在发生变化时立即向机器人发送数据。
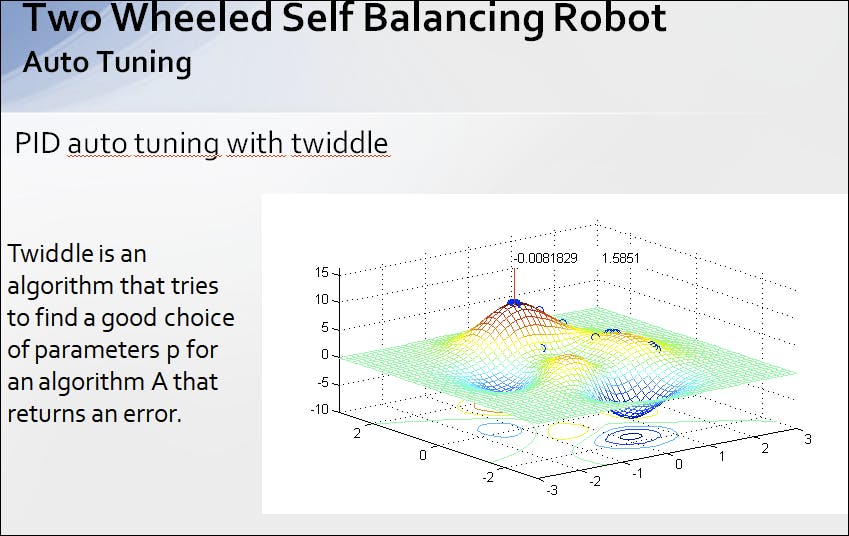
使用 Twiddle 进行 PIDauto 整定
Twiddle 是一种算法,它试图为算法找到一个好的参数选择。也称为爬山,它类似于登山者在浓雾中寻找山顶,并引导他的脚步尽可能陡峭地上坡。如果只向四面八方下降,他就到达了顶峰。Twiddle算法用于PID参数的自动整定。首先,可以通过使用电位计进行手动调整来测试参数。
- 自平衡机器人的构建 0次下载
- 使用Arduino的自平衡机器人 0次下载
- 基于ATMega328p PU的迷你平衡机器人设计 0次下载
- 基于Arduino UNO的自平衡机器人 0次下载
- 带有BT Web控制的Arduino自平衡机器人 0次下载
- Magicbit的自平衡机器人 0次下载
- 平衡segway机器人开源项目 0次下载
- 利用麦克风和音符来控制自平衡机器人 0次下载
- 使用TensorFlow对自平衡机器人进行手势控制 0次下载
- 如何制作WiFi控制的自平衡机器人 12次下载
- Arduino平衡机器人盾牌代码 3次下载
- 迷你平衡机器人 16次下载
- 毕业设计--球上自平衡机器人 4次下载
- 基于JJBoover的远程控制ARDUNO自平衡机器人资料下载 2次下载
- DIY:简简单单自制平衡机器人 25次下载
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 169次阅读
- 机器人技术中常用的路径规划算法的开源库 370次阅读
- 电机转子动平衡机使用过程中的常见问题 549次阅读
- 曲轴动平衡机的基本原理解析及维修方法 2912次阅读
- 烤箱自平衡门铰链机构的设计 1087次阅读
- 利用STM32实现自平衡机器人功能项目 616次阅读
- 基于STM32的自平衡机器人设计 562次阅读
- 基于STM32的球上自平衡机器人设计方案 1588次阅读
- 如何使用Arduino制造一个自动平衡机器人 3902次阅读
- 基于使用A4988驱动程序和HC-05 bt模块构建自平衡机器人 1793次阅读
- 基于ATmage128单片机和红外测距传感器实现自平衡机器人系统的设计 1958次阅读
- 基于ATmega128单片机实现自平衡机器人控制系统的应用方案 3488次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2022次阅读
- 简易平衡机器人制作图解 6574次阅读
- 动态平衡原理分析(智能平衡车的工作原理) 8147次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论