 烤箱自平衡门铰链机构的设计
烤箱自平衡门铰链机构的设计
摘 要:
介绍了一种烤箱自平衡门铰链机构的设计。为解决烤箱柜门打开后不能在任意角度停顿的问题,首先研究了烤箱柜门的平衡方法,在此基础上设计了一种铰链的平衡机构,并利用ADAMS软件对机构进行动力学仿真分析,验证了铰链平衡原理的可行性。铰链实现了柜门在开门后任意角度停顿,同时考虑了柜门密封性与可拆卸的问题,使装配有该铰链的烤箱品质得到了较大提升。
关键词:
烤箱;自平衡铰链;平衡机构;锁紧机构;动力学仿真
0 引言
随着人们生活质量的不断提高,在家烹饪成为许多人的选择,烤箱等烹饪电器逐渐得到了普及。铰链作为连接箱体与柜门的关键机械结构,是烤箱使用过程中工作较频繁的部件,在保证柜门密封性、连接可靠性方面起着重要作用。考虑到用户在使用烤箱时的习惯,不少用户在烹饪时经常会将柜门打开一定角度,以方便对食物的成色以及气味进行判断,而目前市场上大多铰链不具备任意角度停顿功能,这就需要用户在柜门打开一定角度时用手将柜门保持在当前位置,给用户造成了不必要的麻烦。
针对这个问题,本文设计了一种烤箱自平衡门铰链机构,实现柜门重量完全由铰链机构平衡,柜门打开后可在任意角度停顿,满足了用户的使用需求,极大地提升了烤箱的品质。
1 铰链平衡原理及主体结构
1.1 铰链平衡原理
目前,大部分烤箱铰链采用弹簧牵拉的方式,在柜门打开后提供一个平衡拉力,该拉力提供的扭矩往往呈线性变化,不能很好地平衡柜门重力产生的扭矩M。本小节通过建立烤箱简化模型,并对模型进行受力分析,提出了一种基于正弦机构的平衡原理。
烤箱受力简化模型如图1所示,θ为柜门与箱体之间的夹角,G为烤箱柜门的重量,G=mg。假设烤箱柜门的形状规则,且质量分布均匀,则柜门重心处于几何中心上,设柜门的高度为H,可得柜门重心处于H/2高度处。 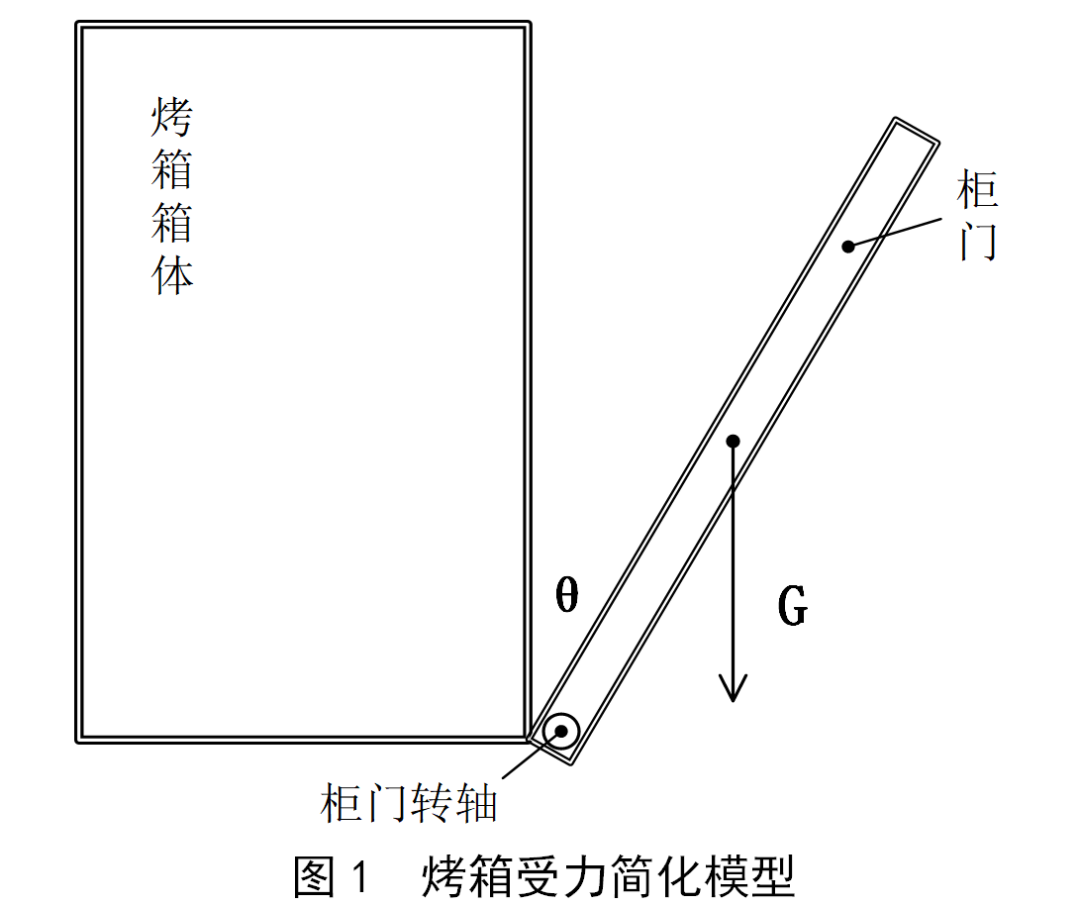 据此,可建立柜门重力对转轴的扭矩方程,表达式如下:
据此,可建立柜门重力对转轴的扭矩方程,表达式如下:

正弦机构受力简图如图2所示。
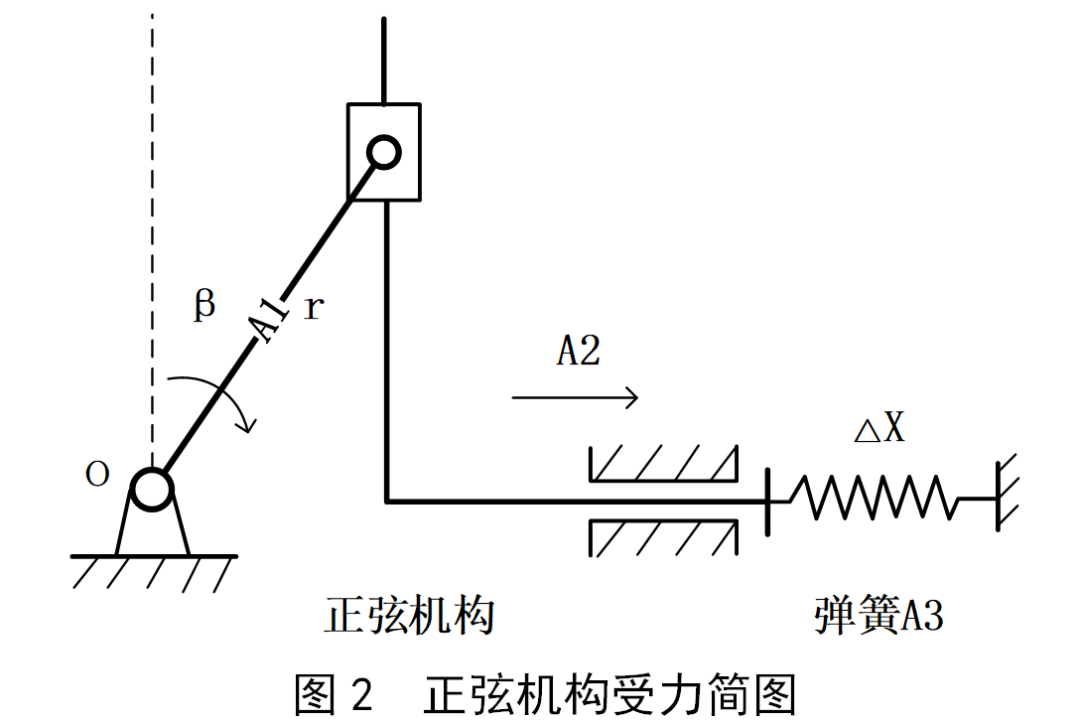
该正弦机构由曲柄A1、推杆A2、弹簧A3组成,曲柄A1做旋转运动,促使推杆A2做水平运动,推杆A2水平运动压缩弹簧A3,使得弹簧A3发生弹性形变ΔX,产生一个阻碍推杆A2运动的弹力F1,并在曲柄A1转轴O处产生一个平衡扭矩M1,该扭矩M1存在如公式(2)所示的关系式:

对正弦机构的曲柄进行演化设计,采用双曲柄设计代替单曲柄设计,可将该二倍角2β进行数值转换,转化成相应的铰链开门角θ。二倍角转换原理图如图3所示,短曲柄B1与长曲柄B2协同转动,且短曲柄B1为双曲柄组件中的主动件,O1点和O2点分别为曲柄组件的旋转中心。
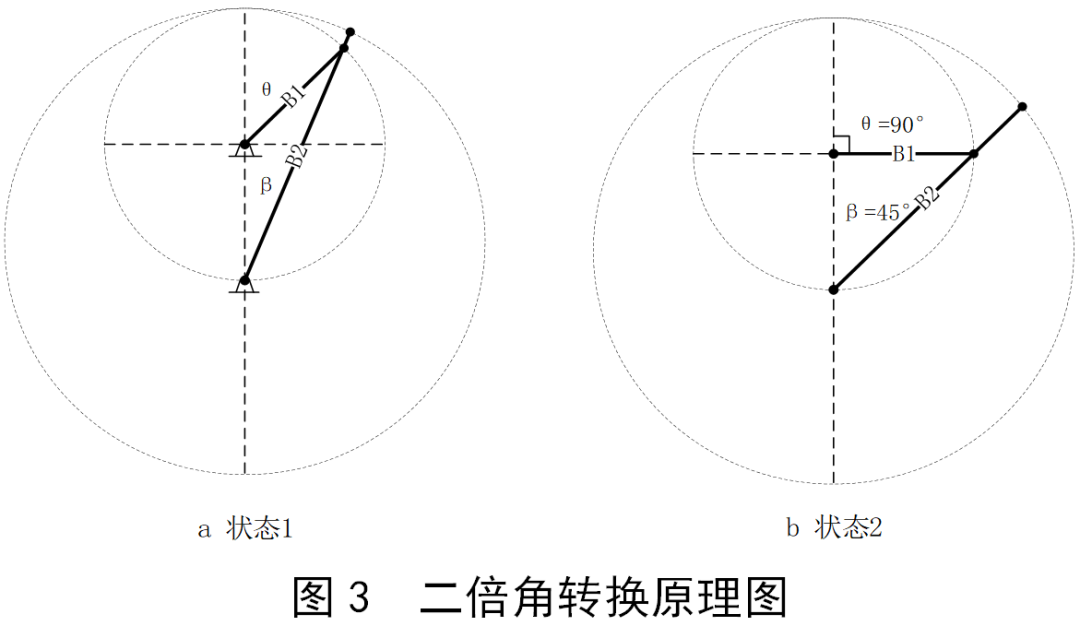
由圆心角等于两倍圆周角的数学定理可知,角θ和角β之间存在二倍角关系:θ=2β,故平衡扭矩M1可表达如公式(3)所示:

由式(1)和式(3)可得,只需设计合适的铰链参数,即可使扭矩平衡方程M1=M成立,从而实现铰链的平衡原理设计。
1.2 铰链主体结构
铰链主体结构如图4所示,主体结构由平衡机构、锁紧机构、连接机构组成。平衡机构提供一个正弦平衡扭矩M1,该正弦扭矩M1能抵消柜门重力产生的扭矩M;锁紧机构起到小角度关门及密封的作用,保证柜门关闭时具有良好的密封性;连接机构起到连接箱体与柜门的作用,并提供了一种门体可拆卸方案,方便用户对烤箱进行清洁工作。
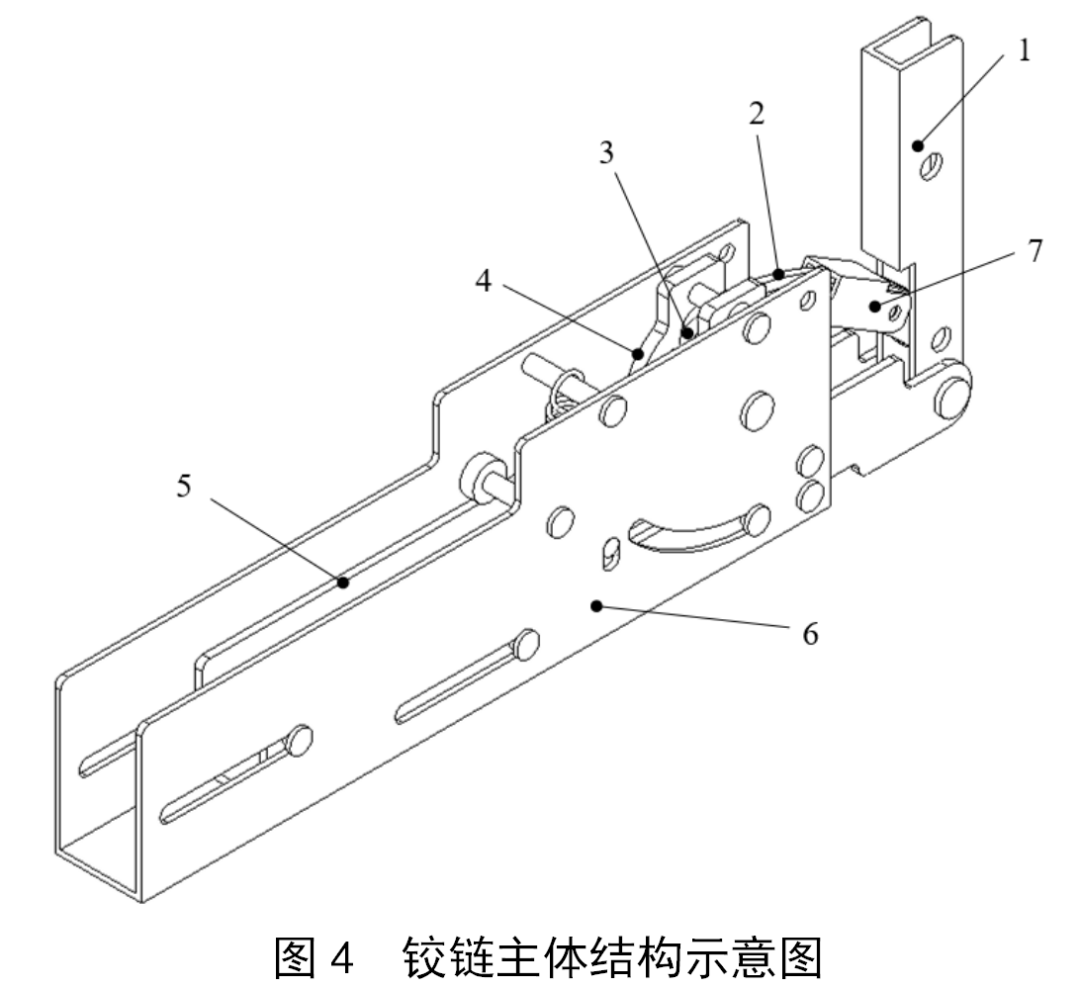
为了更好地表示铰链各构件,对本文铰链各构件进行编号,具体如下:1—铰链杆、2—连接杆、3—短曲柄、4—长曲柄、5—推杆、6—底座、7—锁止杆、8—水平拉簧、9—竖直拉簧、10—滑轴A、11—滑轴B、12—滑轴C、13—柜门转轴、14—曲柄转轴。
+++++++ ++ ++
++ + ++
JI DIAN XIN XI
2主要结构设计
2.1 平衡机构
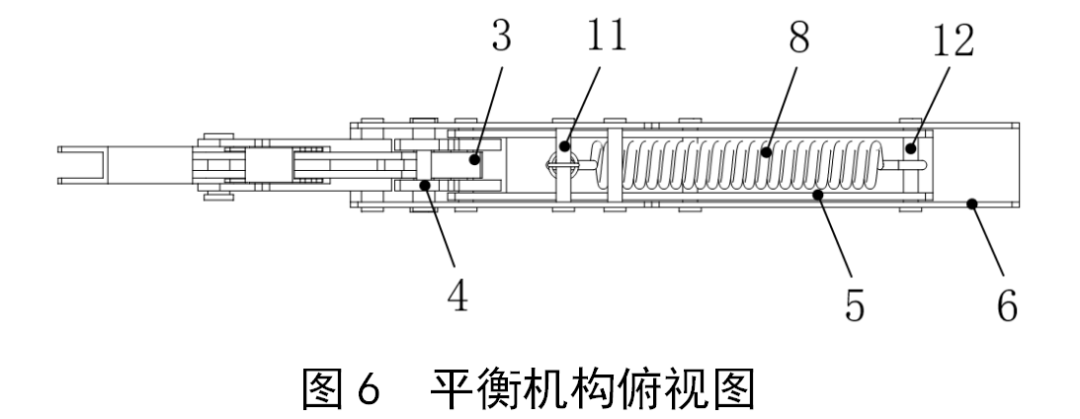
本文所述平衡机构为正弦机构的创新设计,由曲柄组件、推杆5、水平拉簧8以及滑轴组成,平衡机构各构件如图5所示。曲柄组件包括短曲柄3与长曲柄4,曲柄组件各构件协同运动,当短曲柄3转动60°时,长曲柄4转动30°,两者运动规律满足二倍角关系。当曲柄组件转动时,带动滑轴A沿着推杆5的槽孔滑动,从而推动推杆5做水平运动。铰链机构俯视图如图6所示,水平拉簧8一端挂在滑轴B上,另一端挂在滑轴C上,滑轴C随推杆5运动而沿着底座6的槽孔滑动。当推杆5发生水平位移ΔX时,受到水平拉簧8的拉力F1,拉力F1作用于曲柄转轴14上,提供一个正弦平衡扭矩M1,扭矩M1抵消柜门重力产生的扭矩M,使得开门后柜门可在任意角度停顿。 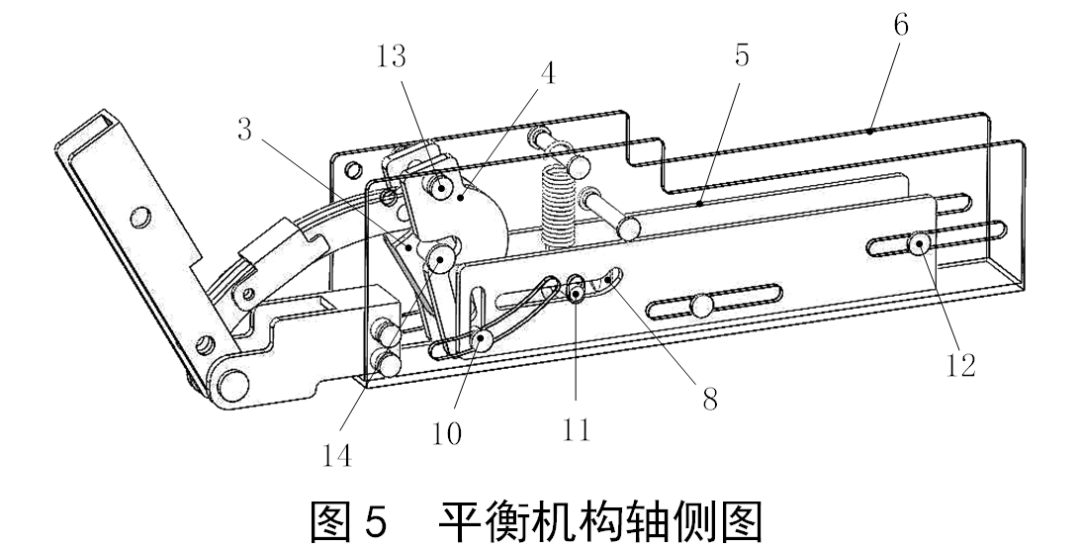
2.2 锁紧机构
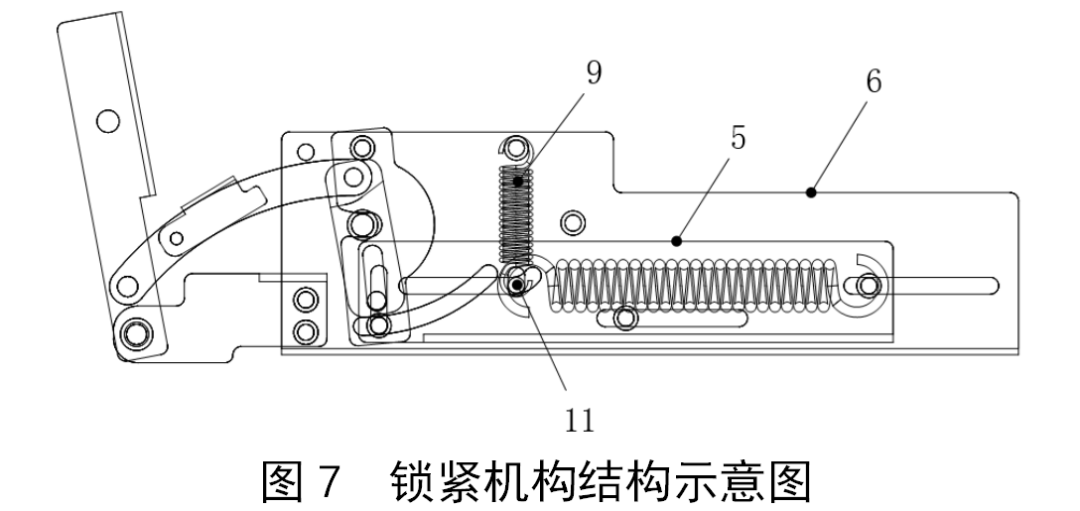
铰链锁紧机构结构如图7所示,主要由竖直拉簧9、推杆5、滑轴B以及底座6组成。竖直拉簧9一端挂在固定轴上,另一端挂在滑轴B上,在铰链机构装配好后,竖直拉簧9存在一定预紧。当铰链处于关闭状态时,由于竖直拉簧9预紧力的存在,滑轴B始终受到竖直拉簧9的拉力F2,从而使得铰链处于被锁紧的状态。
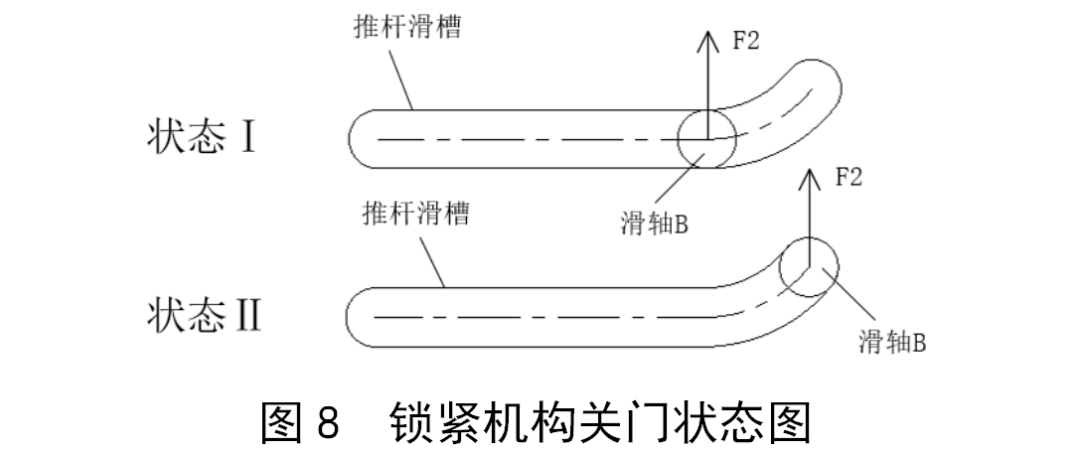
锁紧机构关门状态图如图8所示。铰链在打开过程中,推杆5做水平运动,在推杆滑槽的作用下,滑轴B沿着底座6的滑槽向下滑动,从而使得竖直拉簧9伸长,给滑轴B一个较大的拉力。当柜门开度小于12°时,滑轴B处于图示状态Ⅰ的位置,滑轴受到竖直拉簧9的拉力F2,在弹簧拉力F2的作用下,滑轴B沿着底座6上的槽孔向上滑动,从而推动推杆5沿着关门方向运动。当滑轴B被竖直拉簧9拉至状态Ⅱ位置时,铰链处于关闭状态,当需要再次打开柜门时,要求用户施加一定的开门力,用于克服竖直弹簧9的预紧力,保证了烤箱柜门具有良好的密封性。
2.3 连接机构
铰链是连接箱体与柜门的重要机械部件,连接机构作为铰链的执行机构,是铰链设计的重点内容。铰链连接机构的结构示意图如图9所示,连接机构主要由铰链杆1、连接杆2、短曲柄3、锁止杆7、柜门转轴13及曲柄转轴14组成,其中铰链杆1、连接杆2与短曲柄3共同组成一个平行四边形机构[1]。铰链主体部分安装于箱体内,铰链杆1与柜门通过螺栓紧固连接,从而实现柜门与箱体的牢靠连接。当需要将门体拆卸下来时,将锁止杆7打开至最大角度,使得铰链杆1与锁止杆7相抵触,从而限制铰链杆1的关门动作,方便用户拆卸烤箱柜门,并对烤箱进行清洁工作。
+++++++ ++ ++
++ + ++
JI DIAN XIN XI
3 动力学仿真分析
基于SOLIDWORKS建立铰链机构的三维模型,把铰链模型保存为PARASOLID格式,并导入ADAMS仿真环境,设置仿真参数以及各构件的材料,并对各构件添加相应的约束,建立起铰链机构的虚拟样机模型。
在实际测试的烤箱物理模型中,柜门为质量分布均匀的扁长方体,烤箱柜门质量为7 kg,高度为450 mm。依据前面章节建立的柜门重力扭矩方程可得,在柜门逐渐打开的过程中,重力扭矩M呈正弦规律变化,最大扭矩在柜门开度为90°时,此时正弦函数的值为1,最大扭矩值M=15.435N·m(g取9.8m/s2)。
对建立的铰链虚拟样机进行动力学仿真,在柜门转轴处添加一个旋转驱动,并定义驱动旋转速度为10(°)/s,仿真时间设置为9 s。由于所设置的驱动速度为匀速,故驱动扭矩起到平衡柜门重力扭矩M的作用,在仿真过程中,铰链机构处于受力平衡的状态。铰链机构平衡扭矩M1的仿真曲线如图10所示,扭矩M1选取柜门转轴处驱动的力矩值,相当于铰链正弦机构提供的平衡扭矩M1。
由设置的驱动速度与仿真时间可得,在铰链虚拟样机模型仿真过程中,柜门绕转轴总共转动了90°,相当于柜门从关闭到完全打开的过程。且从图中易看出,平衡扭矩M1呈正弦规律变化。经测量,M1最大扭矩值为15.425 N·m,仿真结果与理论计算值非常接近,从而验证了铰链机构虚拟样机模型的正确性。
4 结语
本文设计提供了一种烤箱自平衡门铰链机构,能够有效平衡柜门重量产生的开门扭矩;在柜门关闭时能够提供一定的锁紧力,使得烤箱柜门具有良好的密封性;同时提供了一种门体可拆卸方案,方便用户对烤箱进行清洗工作,提高了家用烤箱的用户体验性。
责任编辑:彭菁
-
电器
+关注
关注
4文章
711浏览量
40834 -
烤箱
+关注
关注
0文章
16浏览量
8421
原文标题:一种烤箱自平衡门铰链机构的设计与分析
文章出处:【微信号:机电信息杂志,微信公众号:机电信息杂志】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论