 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
在我们之前的博客中,我们发布了关于如何使用 Zio 模块控制机械臂的第 1 部分教程。第 1 部分主要集中于自动控制机械臂的爪子打开和关闭。
在今天的教程中,我们将通过包含一个 PS2 无线控制器来控制机械臂来稍微改进一下。对于这个项目,我们将使用 4 个伺服系统。
一、项目概况
难度级别:
有用的资源:
您应该对如何安装 Zio 开发板有基本的了解。在本教程中,我们假设您的开发板已经配置好并准备好进行设置。如果您还没有配置您的开发板,请查看下面的 Zio Qwiic 入门指南教程以开始使用:
2.原理图
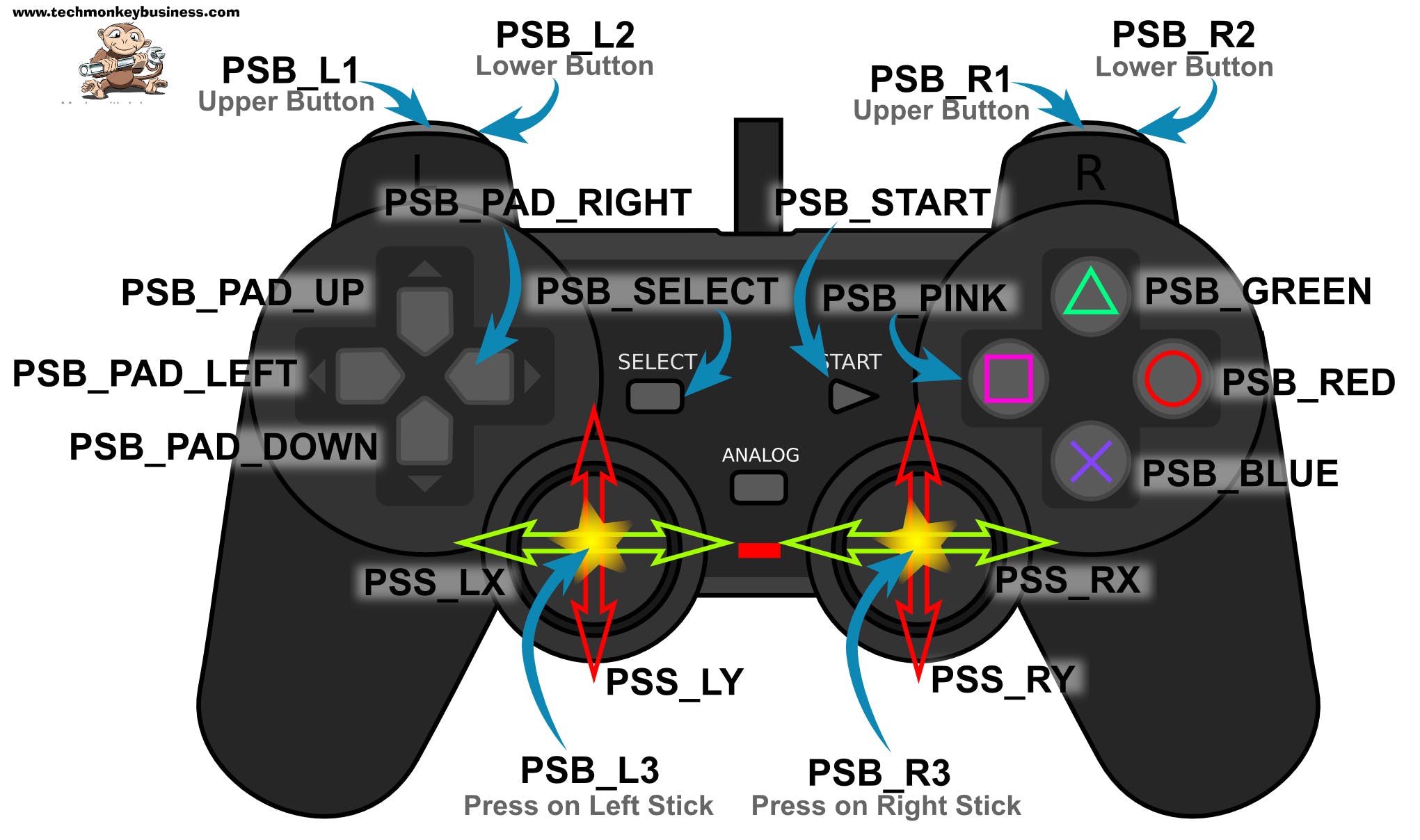
下面是机械臂第 2 部分项目的接线图以及编码部分需要理解的 PS2 控制器图。
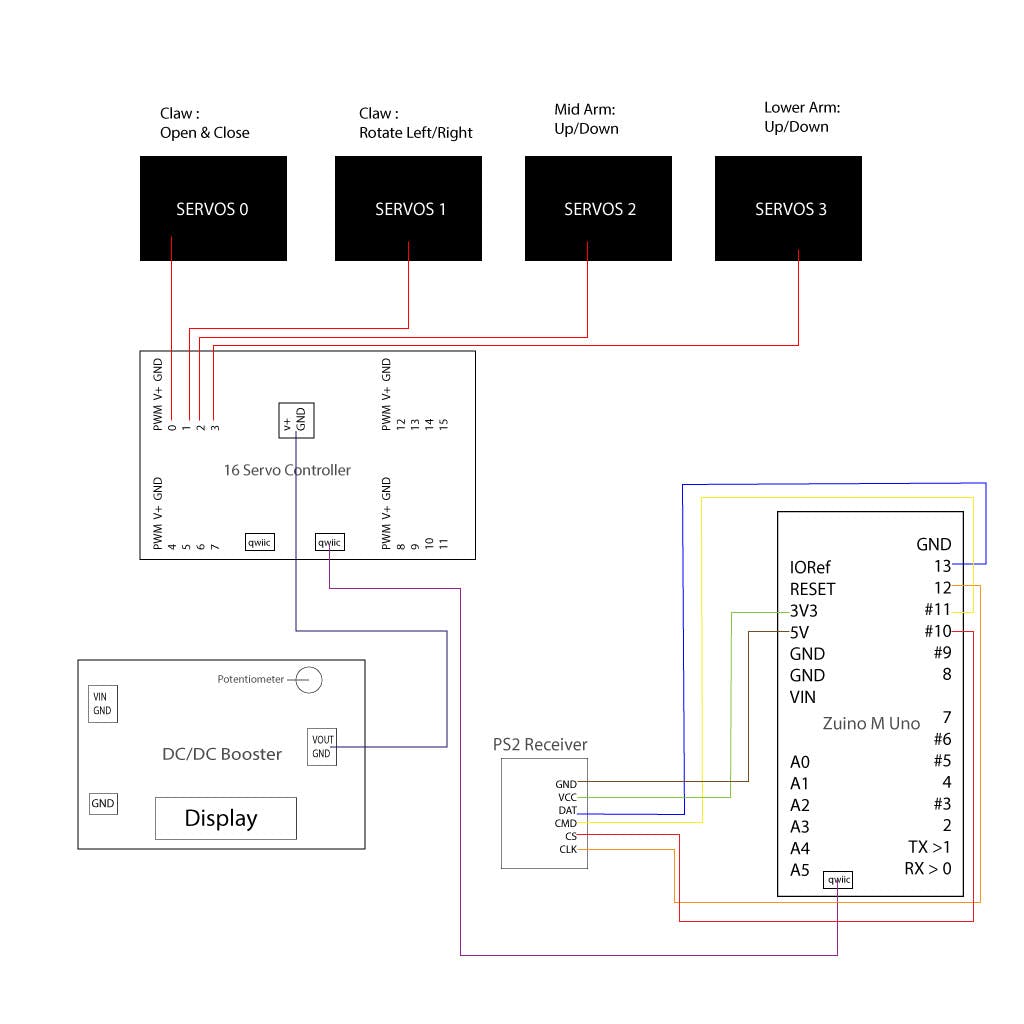
PS2控制器图
3. Zio 模块连接设置
下面是我们要设置的 Zio 模块与机械臂的连接。将所有模块连接在一起非常简单,设置时间不会超过 10 分钟。
将机械臂伺服连接到 Zio 16 伺服控制器
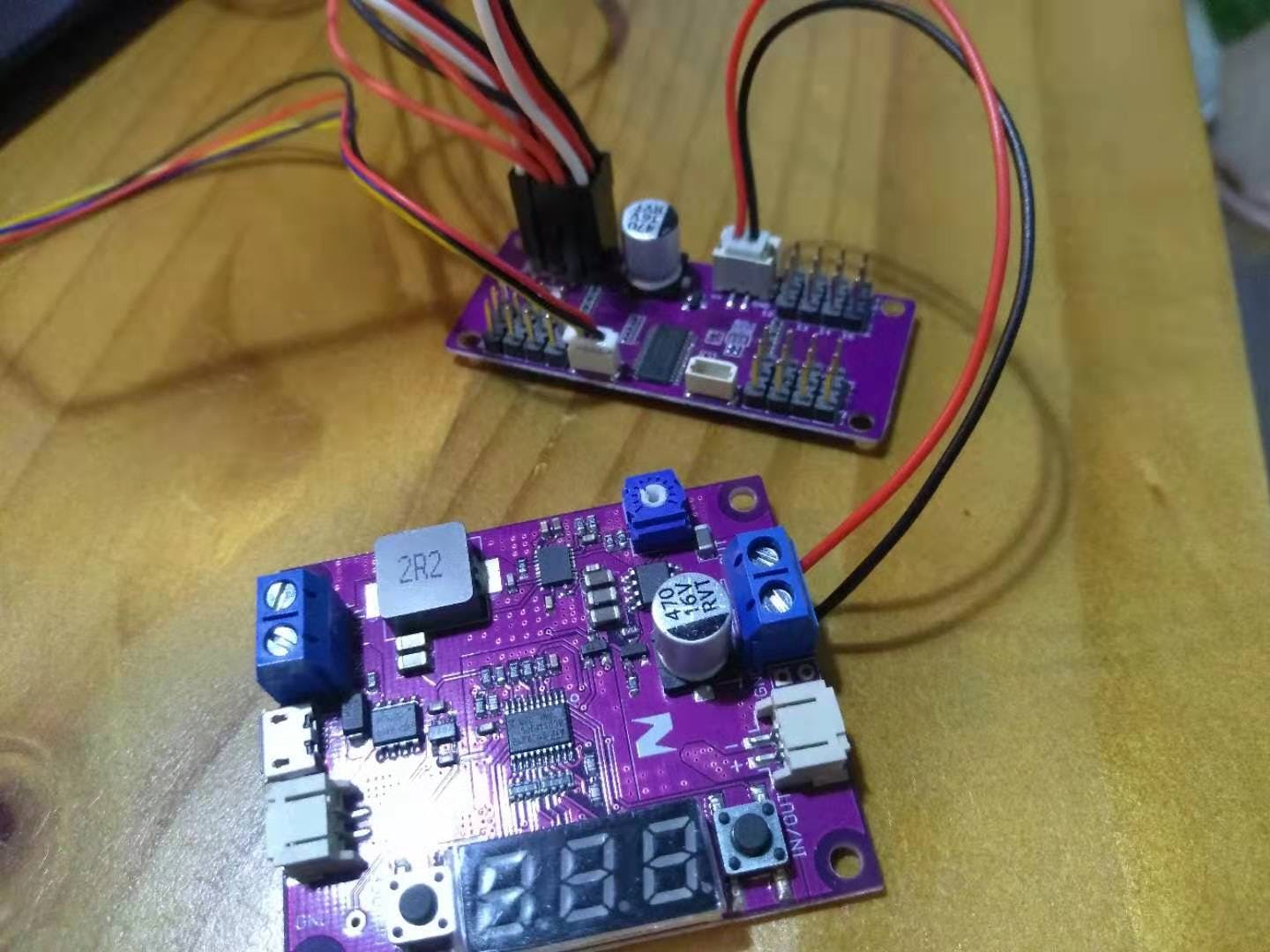
将 16 伺服器连接到 DC/DC 升压器并将其设置为 6.0V。
我们使用 DC/DC Booster 将电池供电电压升压并调整至 6.0。
使用 DC Booster 上的电位器调节电压,直到达到 6.0。按下 In/Out 按钮,直到显示屏显示 6.0。您需要先为 DC/DC Booster 供电(3.7V 电池)以调节电压。
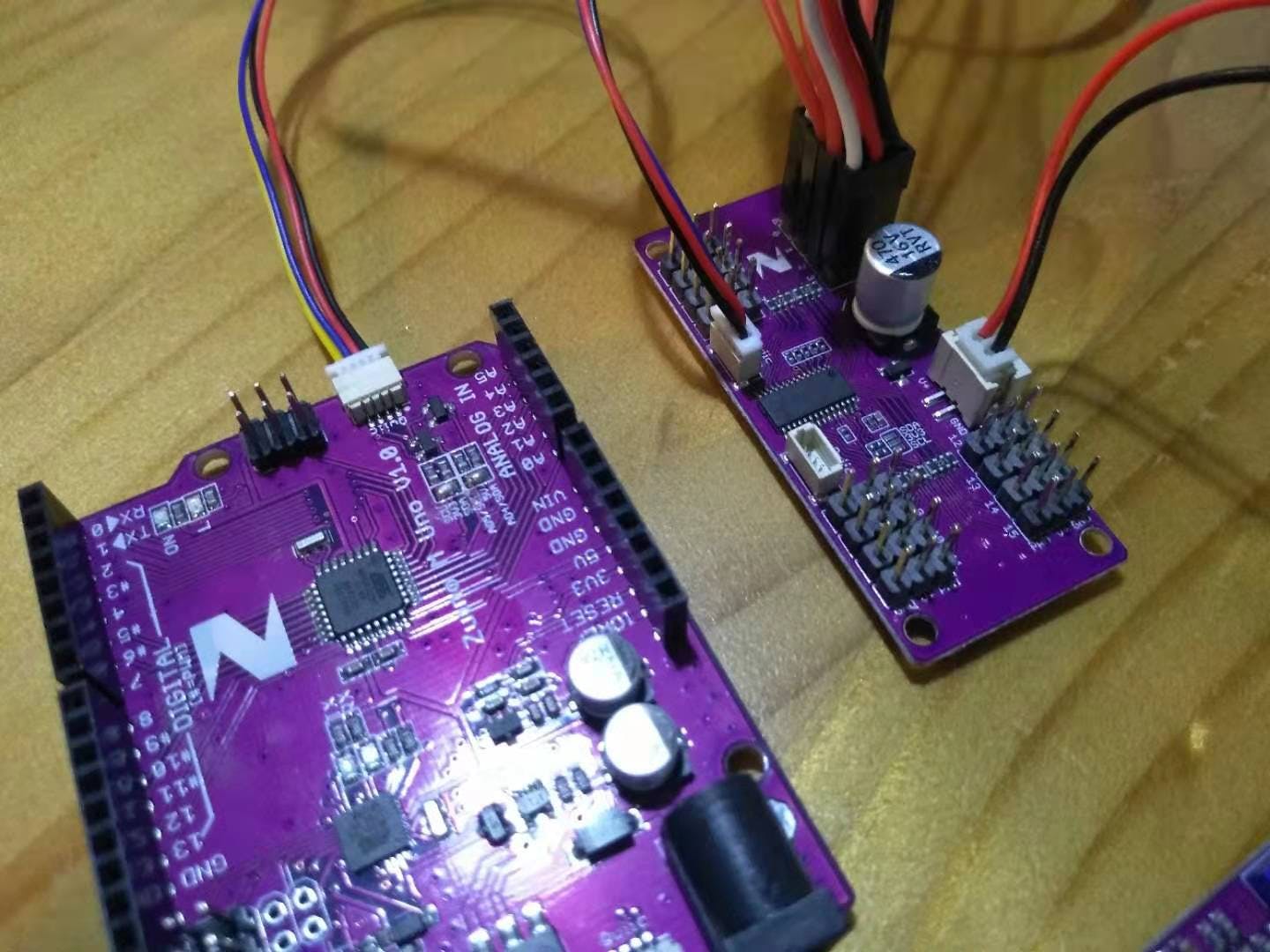
将 Zuino M Uno 连接到 Zio 16 伺服控制器
Qwiic 使用 qwiic 电缆将 Zuino M Uno 连接到 Zio Servo 控制器。
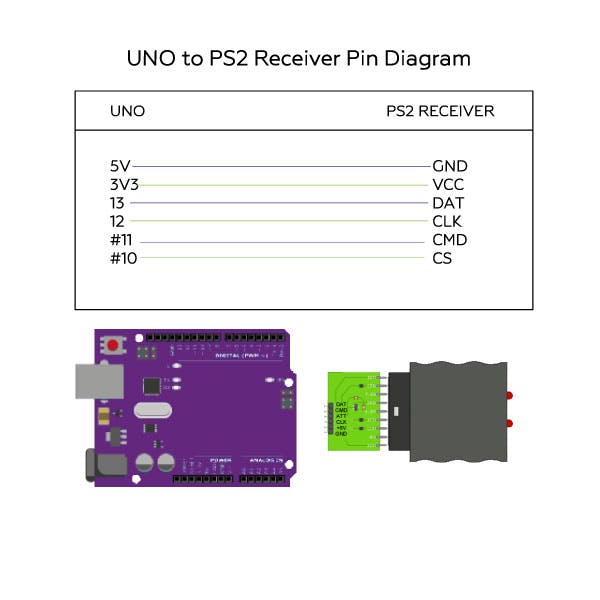
将 Uno 连接到 PS2 接收器
下面是连接的引脚图。这部分需要 5 根公对母跳线。
4. 编码机械臂
我们将使用 PS2 Arduino 库对我们的 PS2 无线控制器进行编码,以便与我们的机械臂配合使用。您可以在我们的Github 页面上找到并下载此机械臂第 2 部分项目的源代码。
下载并安装以下库并将其保存在本地 Arduino IDE 库文件夹中:
要安装库,请打开 Arduino IDE,转到 Sketch 选项卡,选择 Include Library -> Add.Zip Library。选择要包含在您的 IDE 中的上述库。
Arduino 有一个关于如何将库安装到 Arduino IDE 的便捷指南。在这里查看它们!
运行你的代码。
打开 Arduino 集成开发环境。在文件 > 示例 > PS2_Arduino_Library 下,选择PS2X_Servo
注意:在使用 PS2 控制器控制机械臂之前,请检查以下步骤:
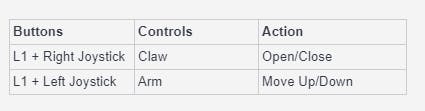
打开你的 PS2 控制器。检查模式 LED 是否亮起。如果没有,请按控制器上的模式按钮。完成上述操作后,您需要按下 Zuino M Uno 上的重置按钮,它才能读取您的控制器设置。您需要按 L1 和操纵杆来移动您的机械臂。
- 左操纵杆控制手臂向上或向下弯曲
- 右操纵杆控制爪打开或关闭,并向左或向右旋转爪。
五、代码说明
PS2X Arduino 库的使用很简单,只需要初始化、设置,然后是读取命令。
要设置 PS2 控制器与 Uno 的连接,以下是您需要在代码中定义的引脚:
/**************************************************************** * set pins connected to PS2 controller: * - 1e column: original * - 2e colmun: Stef? * replace pin numbers by the ones youuse****************************************************************/#define PS2_DAT 13 //14 #define PS2_CMD 11 //15#define PS2_SEL 10 //16#define PS2_CLK 12 //17
我们已经用我们用来连接到我们的 Uno 的引脚替换了引脚,如上面的引脚图所示。
/***************************************************************** select modes of PS2 controller: * - pressures = analog reading of push-butttons * - rumble = motor rumbling * uncomment 1 of the lines for each mode selection
****************************************************************/
//#define pressures true#define pressures false
//#define rumble true#define rumble false
在这里,我们将压力和隆隆声的 PS2 模式定义为 false。我们评论了我们不使用的那些。
我们将仅使用控制器的操纵杆命令和 L1 来控制机械臂的运动。
void loop() {
/* You must Read Gamepad to get new values and set vibration valuesps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255)if you don't enable the rumble, use ps2x.read_gamepad(); with no values
You should call this at least once a second*/
if(error == 1) //skip loop if no controller found return;
else { //DualShock Controller
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed if(ps2x.Button(PSB_START))//will be TRUE as long as button is pressed
Serial.println("Start is being held");
if(ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
vibrate = ps2x.Analog(PSAB_CROSS); //this will set the large motor vibrate speed based on how hard you press the blue (X) button
if(ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { //print stick values if either is TRUE
RY_Value=ps2x.Analog(PSS_RY); RX_Value=ps2x.Analog(PSS_RX); LY_Value=ps2x.Analog(PSS_LY); LX_Value=ps2x.Analog(PSS_LX);Serial.print("Stick Values:"); Serial.print(RX_Value); Serial.print(" "); Serial.print(RY_Value); Serial.print(" "); Serial.print(LY_Value); Serial.print(" "); Serial.println(LX_Value);
下面的代码是我们编写控制机械臂的伺服系统的地方,我们将其包含在 ps2x.button(PSB_L1)|| 下的函数调用中。ps2x.按钮(PSB_R1)。
您需要同时按下 L1 或 R1 按钮和操纵杆来控制您的机械臂。
Left Joystick 控制 Arm 部分的 servos 2 和 3 - 分别控制手臂的弯曲 Up 和 Down,而 Right Joystick 控制 Robotic Arm's Claw 的 servos 0 和 1 打开或关闭,以及向左或向右旋转。
伺服 0、1 - 爪
伺服 2、3 - 手臂
您可以更改此部分中的值以控制机械臂角度:
pulselen0=map(RY_Value,0,127,SERVOMIN0,SERVOMAX0); pulselen1=map(RX_Value,0,127,SERVOMIN0,SERVOMAX0); pulselen2=map(LY_Value,0,127,SERVOMIN2,SERVOMAX2); pulselen3=map(LX_Value,0,255,SERVOMIN3,SERVOMAX3);
- 电源设计方法-第2部分
- 使用Zio模块控制机械臂(第4部分)
- 使用Zio控制机械臂(第3部分)
- 使用Zio控制机械臂(第1部分)
- 电气过应力简介-第2部分
- 了解你的电池组:第2部分
- LDO基础知识:噪声 - 第2部分
- 实时控制技术满足实时工业通信发展的需求 —— 第2部分
- 用电信息采集系统型式规范第2部分 1次下载
- 用电信息采集系统技术规范第2部分 4次下载
- 用电信息采集系统检验规范第2部分 0次下载
- 用电信息采集系统通信协议第2部分 3次下载
- 电压基准如何影响ADC性能,第2部分 10次下载
- 了解天线规格和操作,第2部分 6次下载
- 第2部分-数据模块编码和信息控制编码 8次下载
- 使用myCobot 280机械臂结合ROS2系统搭建机械分拣站 89次阅读
- 深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的? 67次阅读
- 基于六维力传感器的机械臂自动装配应用 834次阅读
- 【开源获奖案例】四轴机械臂控制系统 1319次阅读
- 双极踏脚车(第二部分):微步和衰减模式 656次阅读
- ADC数字下变频器:抽取滤波器和ADC混叠,第2部分 2051次阅读
- ADC眼中的虚拟评估,第2部分 822次阅读
- 边缘智能第1部分:边缘节点 1251次阅读
- 用于电机控制的sinc滤波器和控制算法同步的不同方法 4457次阅读
- 实时控制技术满足实时工业通信发展的需求 —— 第2部分 1074次阅读
- dfrobotArduino开发实战-遥控机械臂套装简介 2531次阅读
- JESD204C入门第2部分:新特性及其内容 6517次阅读
- DC/DC转换器传导EMI - 第2部分,噪声传播和滤波 3338次阅读
- 无源元件并非真的“无源”:第1部分——电容 2519次阅读
- 混合信号系统接地揭秘之第二部分 1712次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论