 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
几天前,我从童年时代发现了一辆漂亮的遥控车,但它的遥控器坏了,所以我想为什么不把这辆车改装成高速 Arduino 遥控车。
所以现在就在这里,我已经把它变成了一辆高速 Arduino 遥控车,今天我将与你分享我是如何做到的。我用于这个项目的应用程序可以从这里下载。
高速 Arduino 遥控车的功能
这款高速 Arduino 遥控车的功能如下
- 前灯
- 背光灯
- 中心的 RGB 灯会让它看起来不错
- 喇叭
- 全方位旋转
- 速度控制
所需组件
高速 Arduino 遥控车所需的组件如下
- 带电机的旧车
- 阿杜诺
- HC-05 或 HC-06 蓝牙模块
- L298N电机驱动器
- 蜂鸣器
- RGB LED
- 2 个红色 LED
- 2 个白色 LED
- 2 X 3.7V 可充电电池
- 9V电池
- 7 X 220 欧姆电阻
硬件
我使用了两个 3.7V 的可充电电池来运行这些电机。这些电池可以反复使用,也可以快速运行电机。
如果您想了解更多关于 Arduino 与 RGB 模块接口的信息,请阅读本教程 | Arduino RGB LED 教程
如果您想了解更多关于蓝牙模块与 Arduino 接口的信息,请阅读本教程 | Arduino蓝牙模块教程
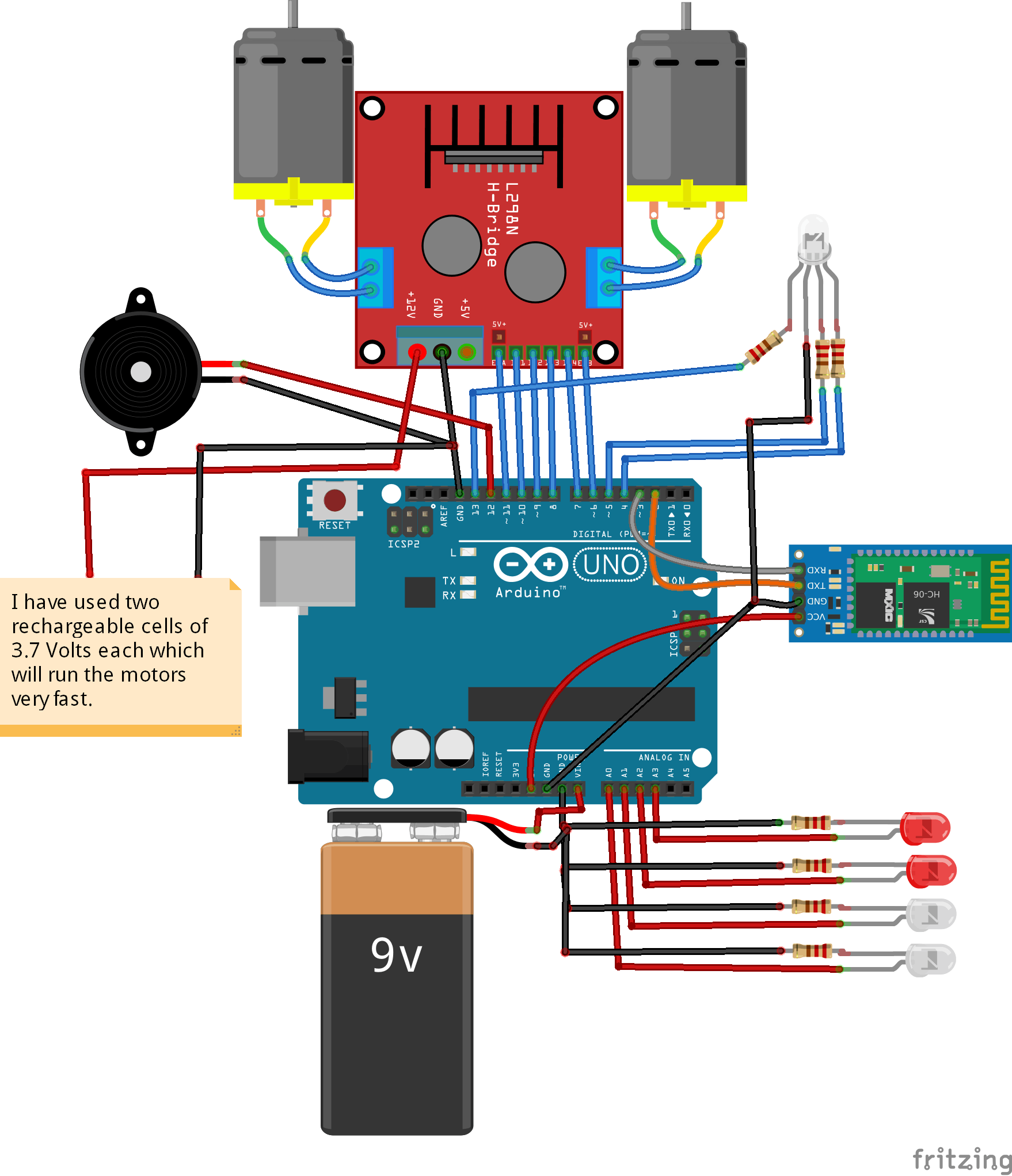
按照上面的电路图完成所有连接后,我的汽车连接电路如下图所示。
将顶部车身安装在其上后,这辆车看起来就像一辆原始的兰博基尼。中间连接的RGB让它看起来更漂亮,它的高速使它可以与市场上的遥控车竞争。



代码
//including the libraries
#include // TX RX software library for bluetooth
#include
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- Arduino遥控车 物联网控制遥控车方案 5次下载
- 物联网遥控车开源分享
- Arduino新型蓝牙遥控车
- 使用Android和Arduino进行遥控车破解
- 带Arduino的Rain1遥控车
- 敏捷的Arduino遥控车
- 遥控车开源分享
- 基于Arduino UNO的射频遥控车 5次下载
- Arduino蓝牙遥控车
- 蓝牙控制遥控车开源分享
- arduino遥控车
- 用Arduino制作遥控车
- ARDUINO遥控车PCB
- 遥控车原理图下载 139次下载
- 多功能遥控车接收电路
- 2.4G收发芯片遥控玩具解决方案 2802次阅读
- Arduino模组的KiCad符号与封装库介绍 2046次阅读
- 结合STM32、Arduino理解红外遥控编解码通信原理 1911次阅读
- 如何DIY一个带遥控器的红外 (IR) 遥控车 8379次阅读
- 微雪电子智能车Arduino AlphaBot2简介 2275次阅读
- 微雪电子智能车学习板蓝牙Arduino开发板介绍 1849次阅读
- 微雪电子智能车学习板配件包Arduino开发板简介 1585次阅读
- 微雪电子树莓派 Arduino 智能车扩展套件介绍 2386次阅读
- 遥控车diy制作教程 7.3w次阅读
- 手工制作红外遥控LED照明灯 可自动调节光度 1.8w次阅读
- 无线遥控车电路图大全(四款无线遥控车电路设计原理图详解) 24.2w次阅读
- 电动车遥控钥匙原理详解 10.1w次阅读
- 自制遥控玩具车电路板 11.6w次阅读
- 浅谈Arduino和树莓派的区别 2.1w次阅读
- arduino开发板有什么用 2.1w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论