 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
机器人关键基础部件定义、分类及市场占有率;
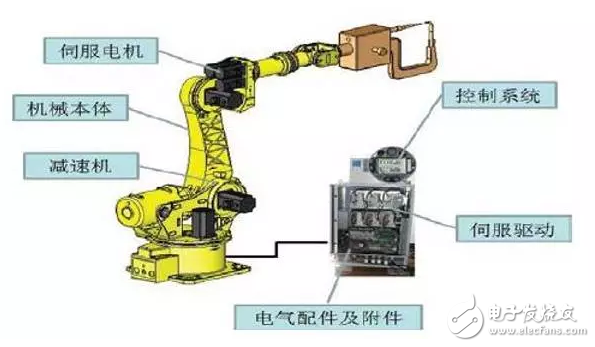
机器人关键基础部件是指构成机器人传动系统,控制系统和人机交互系统,对机器人性能起到关键影响作用,并具有通用性和模块化的部件单元。机器人关键基础部件主要分成以下三部分:高精度机器人减速机,高性能交直流伺服电机和驱动器,高性能机器人控制器等。
目前在高精度机器人减速机方面,市场份额的75%均两家日本减速机公司垄断,分别为提供RV摆线针轮减速机的日本Nabtesco和提供高性能谐波减速机的日本Harmonic Drive.包括 ABB, FANUC, KUKA,MOTOMAN在内国际主流机器人厂商的减速机均由以上两家公司提供,与国内机器人公司选择的通用机型有所不同的是,国际主流机器人厂商均与上述两家公司签订了战略合作关系,提供的产品大部分为在通用机型基础上根据各厂商的特殊要求进行改进后的专用型号。国内在高精度摆线针轮减速机方面研究起步较晚,仅在部分院校,研究所有过相关研究。目前尚无成熟产品应用于工业机器人。近年来国内部分厂商和院校开始致力高精度摆线针轮减速机的国产化和产业化研究,如浙江恒丰泰,重庆大学机械传动国家重点实验室,天津减速机厂,秦川机床厂,大连铁道学院等。在谐波减速机方面,国内已有可替代产品,如北京中技克美,北京谐波传动所,但是相应产品在输入转速,扭转高度,传动精度和效率方面与日本产品还存在不小的差距,在工业机器人上的成熟应用还刚刚起步。
在伺服电机和驱动方面,目前欧系机器人的驱动部分主要由伦茨,Lust,博世力士乐等公司提供,这些欧系电机及驱动部件过载能力,动态响应好,驱动器开放性强,且具有总线接口,但是价格昂贵。而日系品牌工业机器人关键部件主要由安川,松下,三菱等公司提供,其价格相对降低,但是动态响应能力较差,开放性较差,且大部分只具备模拟量和脉冲控制方式。国内近年来也开展了大功率交流永磁同步电机及驱动部分基础研究和产业化,如哈尔滨工业大学,北京和利时,广州数控等单位,并且具备了一点的生产能力,但是其动态性能,开放性和可靠性还需要更多的实际机器人项目应用进行验证。
在机器人控制器方面,目前国外主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发。目前通用的多轴控制器平台主要分为以嵌入式处理器(DSP,POWER PC)为核心的运动控制卡和以工控机加实时系统为核心的软PLC系统,其代表分别是Delta Tau的PMAC卡和Beckhoff的TwinCAT系统。国内的在运动控制卡方面,固高公司已经开发出相应成熟产品,但是在机器人上的应用还相对较少。

机器人关键基础部件国内外发展趋势(技术、产业);
在机器人高精度谐波减速机方面, 在其齿轮传动中采用双圆弧齿廓,可以有效改善柔轮齿根的应力状况和传动啮合质量,提高承载能力、扭转刚度和柔轮疲劳寿命,并可降低最小传动比。日本的IH齿形是基于余弦凸轮波发生器开发的双圆弧齿形,由于采用近似方法设计,应用初期出现了齿廓干涉等问题,但是到1990年代初期已经基本完善。目前,日本谐波传动系统有限公司的谐波产品有十几个类型,二十多个系列,最小传动比为30,型号中带有字母“S”的,其齿形为双圆弧齿形,产品垄断了主要国际市场。其中超短杯型号CSD和SHD,其柔轮长度仅有常规谐波传动柔轮的1/3,既增加传动刚度,又大幅度减轻了谐波减速器重量。此外,在谐波传动轻量化技术方面,采用铝等轻合金材料制造波发生器与减速器壳体等方式,减薄刚轮外缘以及改进连接结构等形式,使整机重量大幅度减轻。 相比于谐波减速机,RV减速机具有更高的高度和回转精度,目前其发展方向是如何通过对内部轴承的配置,材料和热处理工艺的改进,增加减速机的扭转刚度,最大抗弯弯矩,以及提高在频繁加减速等恶劣工况下的使用寿命。
在机器人伺服电机和驱动器方面,机器人专用化的伺服电机和驱动器将成为发展趋势,即在普通通用伺服电机和驱动器的基础上,根据机器人的高速,重载,高精度等应用要求,增加驱动器和电机的瞬时过载能力,增加驱动器的动态响应能力,驱动增加相应的自定义算法接口单元,并且采用通用的高速通讯总线作为通讯接口,摒弃原先的模拟量和脉冲方式,进一步提高控制品质(如安川,松下,伦茨等主流伺服厂商以将EtherCAt总线作为下一代产品的总线标准)。同时,对于通用型的伺服驱动器删除冗余的通讯接口和功能模块,简化系统,提高系统可靠性,并进一步降低成本。
在机器人控制器和控制结构发展趋势方面,不仅要具有快速的响应特性,较高的跟踪精度,而且应该有良好的通用性和扩展性。采用传统控制结构固有的缺点逐渐暴露出来,例如由于配线过多,对系统进行调试及维修比较困难;采用基于模拟信号的数据传输方式,系统的抗噪声能力很差;由于控制器的模块繁多, 模块之间的连接复杂,而且相互制约,难以实现十几个轴以上的同步协调运动控制;机器人所采用的专用的封闭式体系结构阻碍了机器人控制器的发展,满足不了现代工业柔性化发展的要求。同时目前的机器人控制智能型,交互性较差,操作安全性还有待提高。

扫码添加小助手
加入工程师交流群
- 不止技术机器人底盘手册(2206)
- 基于DSP和PC的农业机器人控制系统 18次下载
- ABB-IRB140工业机器人技术样本 32次下载
- MCU是汽车电子的核心部件,它的技术原理是怎么一回事?资料下载
- “时序电路”及其核心部件触发器的工作原理资料下载
- 国内外最新医疗器械原理图解及操作 120次下载
- 微型智能机器人手指关节使用超声波电机的优势 0次下载
- 竞赛机器人制作技术PDF电子书免费下载 47次下载
- 工业机器人教材(张建民)PDF版电子书免费下载 144次下载
- 工业机器人操作机的分类及主要技术指标 6次下载
- 详解工业机器人的机械结构及技术指标 1次下载
- 工业机器人结构、驱动及技术 4次下载
- 对比国内外LED芯片技术 集中在衬底材料上 7次下载
- 自主式移动机器人导航研究现状及其相关技术
- 用胶粘计数修复水压机的核心部件
- 工业机器人伺服驱动器配哪样的UPS不间断电源比较好 535次阅读
- 基于智能制造的工业机器人应用实践 2.6k次阅读
- 国内外工业机器人的差距到底有多大?工业机器人有什么样的应用 5.5k次阅读
- 工业机器人的主要技术有哪些详细介绍 1.3w次阅读
- 机器人核心部件谐波减速机的结构以及工作原理解析 2.1w次阅读
- 工业机器人技术应用 6.1k次阅读
- 国内外工业机器人离线编程软件有何差距 1.1w次阅读
- 解读工业机器人结构、驱动及技术指标 3.7k次阅读
- 工业机器人结构、驱动及技术指标详解 3.7k次阅读
- RV减速机的机械原理对工业机器人的重要性和发展情况 2.3w次阅读
- 《工业机器人技术及应用》让人从认识到熟练掌握工业机器人 7.1k次阅读
- LED芯片技术及国内外差异分析 3.9k次阅读
- 工业机器人主要部件组成有哪些? 1.5w次阅读
- 如何提高机器人伺服电机的响应速度 1.4w次阅读
- 【盘点】工业机器人技术性能特点 2.5k次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费



 工商网监
工商网监
评论