在“双碳”目标引领下,产业园区作为经济发展的核心载体与能源消耗、碳排放的集中区域,其净零转型已成为实现国家低碳战略的关键抓手。然而,园区内能源品类复杂、用能主体多元、碳流轨迹模糊等痛点,导致传统
2025-12-31 09:27:51 325
325 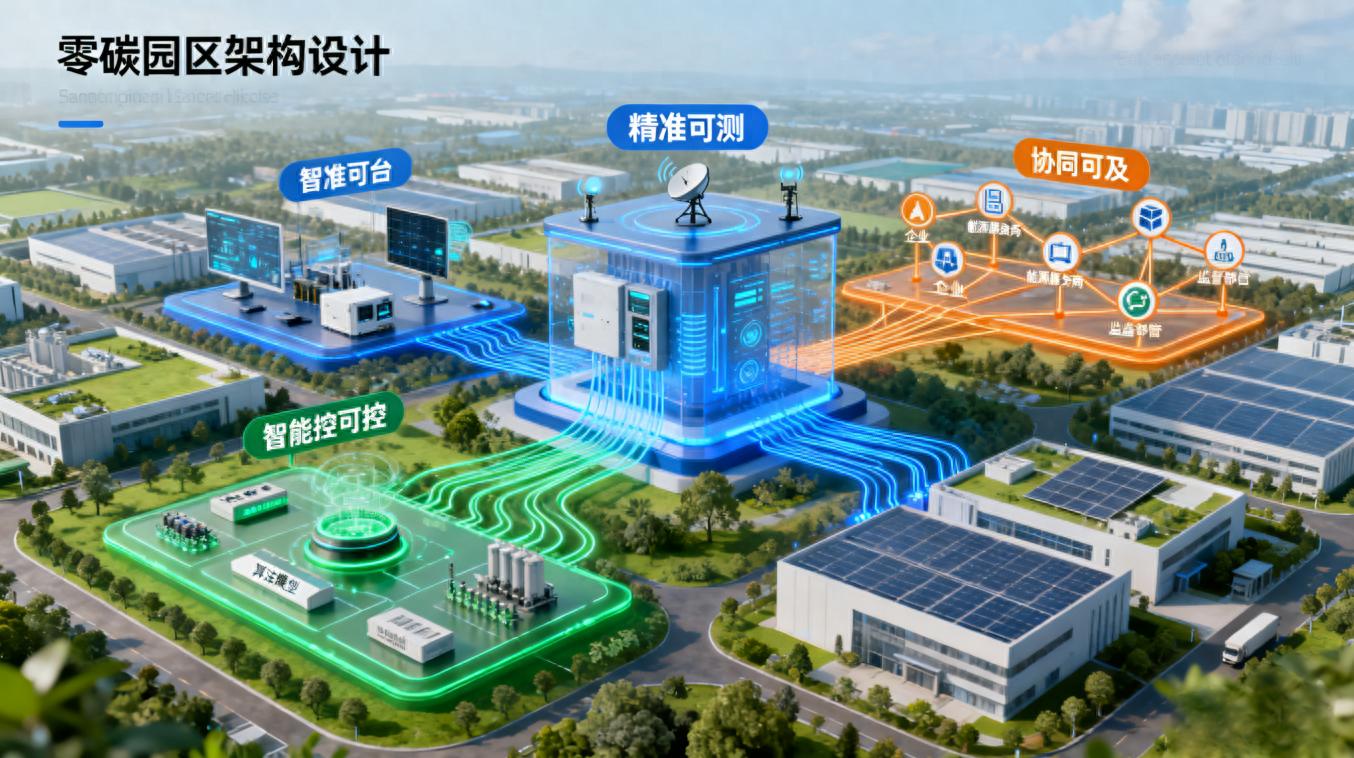
碳园区的 “智慧大脑”,正通过全链路感知、智能化决策、跨场景协同,成为突破这些瓶颈、实现净零目标的 “必由之路”。
2025-12-29 09:38:34370 
SOI晶圆片制造技术作为半导体领域的核心分支,历经五十年技术沉淀与产业迭代,已形成以SIMOX、BSOI、Eltran及Smart Cut为核心的四大成熟工艺体系,并在2025年展现出显著的技术突破与产业化扩展趋势。
2025-12-26 15:15:14188 
,蓝牙音乐无缝流转。这些体验的背后,是广州唯创电子针对电动车仪表市场推出的四大差异化语音芯片方案。它们如同四位各有所长的“智能声卡”,将电动车从沉默的代步工具,转
2025-12-23 09:07:13303 
日前,德国中国商会于德国柏林举办CHKD Award 2025(德中经贸合作奖)颁奖典礼,蔚来凭借在净零战略推进、能源体系创新以及绿色出行实践中的卓越表现,荣获「可持续发展奖 - 净零排放」。
2025-12-19 09:47:20172 作为硬件工程师,近期拆机一款主流电子烟时发现其核心控制芯片为华芯邦的EC0059H。针对这款芯片,我进行了为期一周的实测验证,从参数性能到功能稳定性均做了详细评估,以下是我的实测报告与推荐建议。 一
2025-12-18 10:11:10171 ,Mobile AI)时代通信网络将经历的四大核心转型。他指出,我们正站在从移动互联网时代迈向移动AI时代的历史拐点,这一变革将为沙特"2030愿景"的实现提供强大技术支撑。
2025-12-17 16:47:00614 2025年以来,后摩智能在多项前沿研究领域取得突破性进展,近期在NeurIPS、ICCV、AAAI、ACMMM四大国际顶会上有 6 篇论文入选。致力于大模型的推理优化、微调、部署等关键技术难题,为大模型的性能优化与跨场景应用提供了系统化解决方案。
2025-11-24 16:42:35929 
及本体形态演进路径的思考。他认为,未来的智能机器人本体构型将逐渐收敛,而本体构型的收敛并非单一形态的胜利,而是四大形态长期共存、各司其职的生态格局。 机器人市场多轮驱动,本体构型的四大收敛形态 并存 当前,全球
2025-11-11 09:23:105180 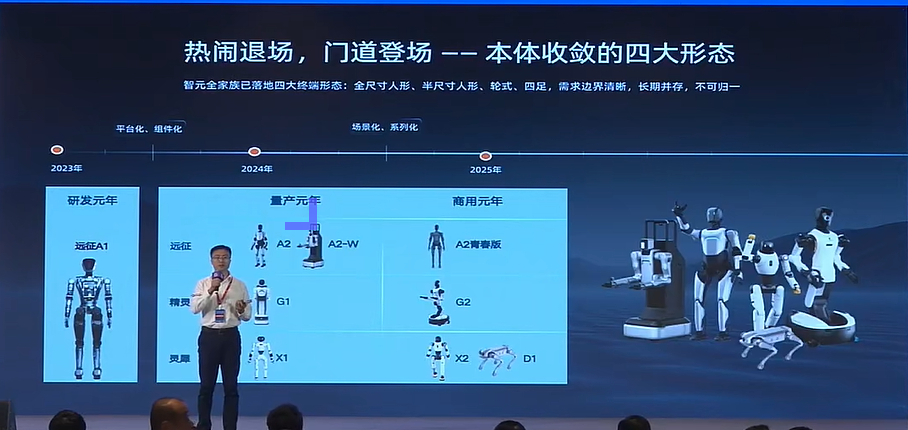
烟叶除杂、烟叶霉变识别、烟叶烟梗识别区分、烟叶等级分选等。中达瑞和将从上述四个方面做光谱数据采集、数据处理分析、得出相应的结论,系统阐述高光谱成像系统如何赋能烟叶分选全流程。 高光谱成像技术原理 高光谱成像(
2025-11-05 17:24:413378 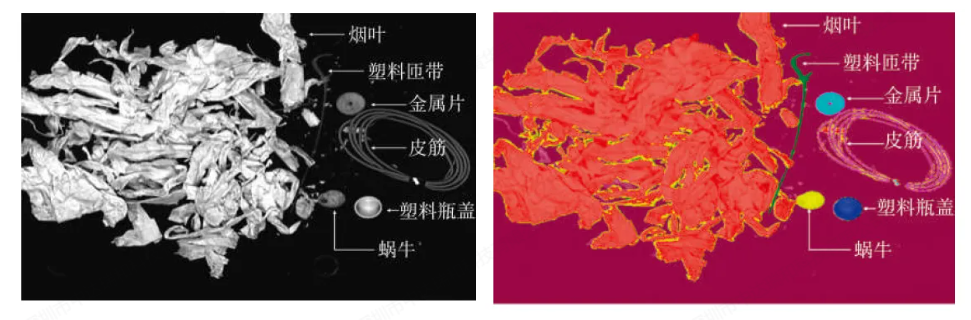
国际民航组织(ICAO)联合193个成员国提出2050年净零排放目标,这一承诺在2025年的ICAO第42届大会上得到重申,各成员国确认了对实现国际航空净零碳排放的坚定承诺。
2025-11-04 11:20:45479 
技术已从单一识别工具升级为物联网感知层的核心节点。中国作为全球最大的 RFID 应用市场,2024 年标签出货量超 200 亿枚,市场规模突破 612.2 亿元,其中物流仓储、零售、智能制造、医疗健康四大领域的应用成熟度最高,成为驱动行业增长的核心引擎。 一、物流仓储:供应
2025-10-28 09:02:52659 一、发明背景:一场由火灾引发的材料革命 1979年,英国科学家Richard Skipper首次提出“低烟无卤”概念,旨在解决传统PVC电缆在火灾中释放剧毒气体的问题。当时,伦敦地铁火灾导致数百人因
2025-10-22 10:11:21387 一、什么是低烟无卤阻燃线缆? 低烟无卤阻燃线缆(LSZH,Low Smoke Zero Halogen)是一种在燃烧时具备三重特性的环保型电缆: 低烟:燃烧时烟雾量极少,透光率≥60%,远低于普通
2025-10-21 10:38:12754 
从智能家电到工业机器人,从新能源汽车到低空经济,和而泰的四大技术平台正在重新定义智能设备的"生命系统"。
2025-10-13 16:08:46883 Holtek新推出专为感烟报警器应用设计的内置万年历和蜂鸣器驱动器的增强型Flash MCU BA45F25752/BA45F25762,整合双通道感烟侦测AFE、红外/蓝光LED驱动、万年历
2025-10-13 13:33:431130 肖特基二极管凭借低正向导通压降(V_F)与短反向恢复时间(t_rr),成为降低电路功耗的关键器件。 星海SSxx系列肖特基二极管技术解析:四大封装的参数特性与场景适配。 该系列采用N型外延硅衬底与高
2025-09-17 14:21:332325 近年来,电子烟市场持续扩张,消费者对产品便携性和使用体验的要求日益提升。在这一背景下,合粤电子推出的缩小体电容技术成为行业焦点。该技术通过微型化设计适配烟杆内部有限空间,同时解决了传统电容供电不稳
2025-09-15 16:50:24617 边缘计算网关的数据过滤功能是其核心能力之一,主要体现在 本地数据清洗、冗余剔除、异常值处理、协议适配过滤及业务规则过滤 五个层面,通过减少无效数据传输和云端处理压力,实现高效、安全的数据处理。具体
2025-09-11 11:23:46613 
。
应用领域
电池供电设备:蓝牙音箱、电子烟、快充移动电源;
便携式POS终端;
TFT液晶显示驱动;
网络设备:机顶盒、DSL/电缆调制解调器及路由器。
SLM6240CB-13GTR是一款集成度高
2025-09-10 08:21:16
目前电子烟在全球市场的表现非常不错,很多国产电子烟厂家都有非常不错的产品,而屏幕驱动方案是电子烟智能化的重要组成部分,今天就给大家带来电子烟的4种主流屏幕驱动方案(含2025年最新版方案
2025-09-09 14:12:39367 等领域头部企业的战略之选,正因其在四大核心维度构建了不可替代的竞争优势,为电子供应链注入持续稳定的发展动能。
2025-09-06 15:03:22861 无线充电宝利用电磁感应技术实现无线充电,兼容Qi标准,兼具便捷性与实用性,成为传统充电宝的替代方案。
2025-09-06 08:28:001338 
低烟无卤阻燃网线在耐火性方面表现优异,具备在火灾条件下维持一定时间电力传输的能力,适用于消防应急系统等对防火安全要求较高的场所。其耐火性主要通过以下方面体现: 一、耐火性能标准与测试 标准要求:低烟
2025-09-05 10:20:00636 低烟无卤阻燃线的载流量并无统一固定值,其受线芯截面积、材质、绝缘层特性、环境温度及敷设条件等多重因素影响。以下是对其载流量的详细分析: 一、低烟无卤阻燃线的特性 低烟无卤阻燃线是一种环保型电缆,其
2025-09-05 10:08:44441 2025 汇川技术爆品发布会上,FA、运控、传动、机器人四大 IPMT 主任携覆盖 “设计 - 制造 - 传动 - 执行” 的全栈架构登场,为中国制造业智能化转型破局。这不是简单产品升级,而是重构智能制造底层逻辑的革命。
2025-09-02 15:54:114348 
的战略选择。然而,实现工厂运营的“净零排放”,需突破能源结构单一、能效管理粗放、碳排数据模糊等瓶颈。 一、什么是零碳工厂(安科瑞电气工程师徐悦18702111076) 零碳工厂是指以实现近零或零温室气体排放为目标,通过自主减排
2025-09-01 17:52:26648 
压铸件泄漏是制造业常见质量难题,看似偶然,实则是设计、工艺、材料、检测四大环节的“漏洞”共同导致。空气通过这些薄弱点侵入产品,引发质量事故。下面深度剖析四大元凶,并提供实战解决方案。1.设计缺陷隐形
2025-08-29 15:39:351061 
新能源锂电禁铜锌过滤设备【1】 新能源锂电池行业禁铜禁锌过滤设备|锂电专用过滤器设备|锂电材料定制过滤设备产品| 佳洁过滤器产品专为新能源锂电行业设计和制造,对加工细节和车间生产
2025-08-23 14:15:12
新能源锂电禁铜锌过滤器 新能源锂电禁铜锌过滤设备【1】新能源锂电禁铜锌过滤器空气过滤器是一种新型的过滤器,它是由铜锌合金制成的。这种合金有很好的抗菌、抗氧化和抗腐蚀性能,因此可以有效地过滤
2025-08-23 14:12:44
网线光纤存在低烟无卤阻燃B1级产品,且该等级在安全性、环保性及适用场景上具有显著优势,具体分析如下: 一、B1级阻燃标准的定义与特性 标准依据 B1级阻燃标准源自中国国家标准《GB
2025-08-19 11:10:231931 在水工建筑物安全监测与岩土工程领域,水位数据的精准获取直接关系工程安全与决策效率。投入式水位计凭借高精度、强适应性和智能化特性,已成为行业主流监测工具。南京峟思将解析其四大核心应用场景,为工程师
2025-08-12 11:07:08409 
显示等四大关键技术至关重要,这些技术的发展和突破对于实现MicroLED的商业化应用具有重要意义。美能显示,作为专注于研发显示行业精密高效检测设备的企业,深度参与到这
2025-08-11 14:55:002232 
DT-9898PRO+的出现,定义了工业预测性维护的更高标准,助力企业实现从“被动维修”到“主动预防”的跨越式发展,并为电气、机械、管道、过程工业四大领域提供全场景安全护航。
2025-08-11 14:12:071095 
近年来,随着国家对资源、能源有效利用率的要求越来越高,对环境保护和水处理的要求也越来越严格,因此有大量的固液分离问题需要解决。真空过滤器是是由负压形成真空过滤的固液分离机械。用过滤介质把容器分为上
2025-08-08 18:12:37497 
无论是初创企业还是成熟品牌,选对PCBA代工厂都是项目成功的关键一步。那么,如何从众多代工厂中筛选出最适合的合作伙伴?以下四大核心标准为您指明方向。 一、技术匹配度 首先需确认其是否具备特殊工艺
2025-08-08 17:10:261027 大连义邦的DEXMET PFA全氟过滤支撑网凭借高精度(0.11mm)、耐强腐蚀、低摩擦、自润滑等特性,成为半导体制造(如光刻、蚀刻、CMP工艺)中提升过滤效率、保障芯片良率的关键材料之一,其独家延展工艺和工业化量产能力在国际市场具有技术领先优势。
2025-08-08 14:17:34542 
《湖南省零碳工厂建设方案(暂行)》中明确提出,零碳工厂是指在生产、服务过程中,通过自主降碳、优化管理和购买碳指标抵消等方式,最终实现净零碳排放的工厂。19821800313 主要目标方面,重点如下
2025-08-07 14:13:53839 
意法半导体第二季度实现净营收27.7亿美元,毛利率33.5%,营业亏损1.33亿美元,净亏损9,700万美元(合每股摊薄收益-0.11美元)。按非美国通用会计准则计算,净营业利润为5,700万美元,净利润为5,700万美元(合每股摊薄收益0.06美元)。
2025-07-30 16:04:03809 2025年6月,充电宝行业爆发安全风波,超120万台因电芯缺陷、电路保护失效召回,召回总量超过120万台,创行业纪录。高性能,高可靠性的MOS管对移动电源的安全性至关重要。
充电宝应用原理图
移动
2025-07-29 15:58:49
在现代化电子商务和应用程序开发中,高效的产品搜索与过滤功能至关重要。它能帮助用户快速找到所需商品,提升用户体验和转化率。产品搜索与过滤API接口作为后端服务的核心组件,允许开发者通过编程方式实现
2025-07-24 14:35:37442 
低烟无卤电线与普通电线在材料、环保性、安全性、性能及适用场景等方面存在显著差异,以下是具体对比分析: 一、材料组成:从“有毒”到“环保”的跨越 低烟无卤电线: 绝缘层:采用交联聚乙烯(XLPE
2025-07-17 10:02:021595 
低烟无卤电线是一种在燃烧时仅产生少量烟雾且不释放含卤有毒气体的环保型电线,其核心特性与优势如下: 一、核心定义与材料特性 无卤素:绝缘层不含氟(F)、氯(Cl)、溴(Br)、碘(I)等卤素,燃烧
2025-07-17 09:58:082486 这一篇文章介绍几种芯片加工工艺,在Fab里常见的加工工艺有四种类型,分别是图形化技术(光刻)、掺杂技术、镀膜技术和刻蚀技术。
2025-07-16 13:52:553322 
过滤器作为工业设备、汽车及电子产品的关键部件,其制造质量直接影响系统性能和寿命。激光焊接技术凭借其精密、高效与可靠的特性,正逐步成为过滤器焊接工艺的核心解决方案,解决了传统焊接方法难以克服的挑战
2025-07-10 15:08:57411 
AndriesBosma(气体流动产品经理),ManuelEckstein(暖通空调大客户经理)在需要清洁空气的地方,空气过滤器通常就在不远处。在过去十年里,过滤行业在过滤技术方面取得了巨大进步
2025-07-08 12:05:58420 
Dx-BST智能工具四大网络功能1.单端网络检查该功能能够全面扫描原理图中的所有单端网络,对其状态进行检测和管理。工具会自动列出所有存在的单端网络及其所在页面,用户通过双击网络名称即可快速跳转至对应
2025-07-03 11:45:44417 
用主芯片能够同时胜任图形渲染、AI推理和安全计算等多重任务。当下,功能安全、高效高灵活性的算力、产品生命周期,以及软件生态兼容性这“四大核心要素”,已成为衡量智
2025-07-02 08:32:321247 
当下,功能安全、高效高灵活性的算力、产品生命周期,以及软件生态兼容性这“四大核心要素”,已成为衡量智能汽车AI芯片创新力和市场竞争力的核心标准。
2025-07-01 14:49:01557 充电宝快充协议是充电宝与设备之间实现快速充电的通信规则,它定义了电压、电流、功率等参数的传输标准,确保设备与充电宝高效匹配,实现安全快充。 以下是主流快充协议的详细解析: 一、快充协议的核心作用
2025-06-30 09:17:087756 (轻载)
3、800kHz高频开关|关断电流低至0.1μA
4、多重保护:过压(OVP)/过温/欠压/过流
5、可调软启动|精简外围电路
应用领域
-便携设备:蓝牙音箱、电子烟、快充移动电源
-显示
2025-06-30 08:38:56
低烟无卤阻燃线的定义 低烟无卤阻燃线(Low Smoke Zero Halogen Flame Retardant Cable,简称LSZH或HFFR)是一种在燃烧时具有低烟雾、无卤素释放和阻燃性
2025-06-24 10:51:311579 
低烟无卤阻燃线的型号标准主要依据中国国家标准(如GB/T)和国际标准(如IEC),以下是对其型号标准的详细归纳: 一、中国标准(GB/T)下的型号表示 基础型号: WD:无卤低烟。 Z:阻燃。 N
2025-06-24 10:47:109589 作为全球首个净零排放目标获科学碳目标倡议组织(SBTi)批准的汽车科技企业,FORVIA佛瑞亚集团已在中国区取得亮眼成绩——提前实现“范围一”和“范围二”排放量降低80%(与2019年相比),并全力朝着于2045年实现净零排放的承诺前进。
2025-06-19 13:40:47862 Holtek新推出集成感烟探测AFE、双通道LED驱动及9 V蜂鸣器驱动的32-bit Arm Cortex-M0+ MCU HT32L62141,采用超低功耗ULP (Ultra-Low Power) 设计,并提供多种省电模式,可满足10年电池产品寿命需求,适用于感烟探测报警器。
2025-06-18 16:52:201170 多组转换型变焦系统可以实现多档断续变焦。设计时同时设计多重可打入活动组,在打入时随意转换。多组转换型的活动组可以放置在会聚光路中也可以在平行光路中。选择在平行光路中,可利用活动组的无焦性来回倒置获得
2025-06-18 08:49:13
低烟无卤阻燃电线的型号规格等级涉及多个方面,以下是对其详细解析: 一、型号表示 低烟无卤阻燃电线的型号通常包含以下关键字母,以表示其特性: WD:无卤低烟,表示电线在燃烧时不会产生有毒卤素气体,且
2025-06-16 09:46:005111 在半导体产业的核心地带,芯片制造工厂以其高度自动化、超净环境和复杂的工艺流程闻名。这些工厂不仅是技术密集型的象征,更是精密工程与空间设计的典范。
2025-06-11 15:13:473148 
送出:
00 00 00 5A 05 E9 00 01 03 12
E9=发送命令
01=报警器的编码
03=烟警
6.如果高温报警,蜂鸣器响,接收送出:
00 00 00 5A 05 E9 00 01
2025-06-04 11:14:52
升压芯片FP6277采用了高效升压电路设计,霍尔MH251开关控制电子烟状态,外围电路简单高效,这些设计和功能提高了电子烟的使用体验和功能性,同时减少对健康的影响。
2025-05-28 15:15:071156 本文介绍了先进集成电路制造多重曝光中的套刻精度要求。
2025-05-21 10:55:461906 
本文是作者2024年“第十八届中国半导体行业协会半导体分立器件年会”演讲稿第二部分,第一部分请见《英飞凌碳化硅SiC技术创新的四大支柱综述(一)》。英飞凌SiC技术创新到丰富产品的四大支柱SiC
2025-05-19 17:32:02652 
TP4062 是一款适合电子烟方案的完整单节锂离子电池充电器,带电池正负极反接保护,具有更大 600mA 的充电电流,更稳定的电流一致性。其采用恒定电流/恒定电压线性控制,SOT 封装
2025-05-16 18:01:04 0
0 低烟无卤电缆与阻燃电缆在材料组成、燃烧特性、环保性能及适用场景等方面存在显著差异,以下为具体分析: 一、材料组成 低烟无卤电缆: 绝缘层与护套材料:采用无卤聚合物,如交联聚乙烯(XLPE),并可
2025-05-13 14:03:382064 阻燃低烟无卤电线的代号通常以“WDZ”开头,具体含义和常见代号如下: 代号组成: “W”表示无卤,即电线不含有卤素。 “D”表示低烟,即电线在燃烧时产生的烟雾量较少。 “Z”表示阻燃,即电线具有
2025-05-08 10:27:215115 WDZ-BYJ-3*2.5是一种无卤低烟阻燃的铜芯交联聚烯烃绝缘电线,属于布电线类别。以下是对该电线的详细解析: 一、型号含义 WDZ:表示低烟无卤阻燃。其中,“W”代表无卤,“D”代表低烟,“Z
2025-05-07 10:54:5610404 2025上海车展正在如火如荼地进行!作为全球首个净零排放目标获科学碳目标倡议组织(SBTi)批准的汽车科技企业,FORVIA佛瑞亚在上海车展传递可持续之声。
2025-04-29 10:33:58978 第一季度净营收25.2亿美元;毛利率33.4%;营业利润300万美元;净利润5,600万美元。
2025-04-29 09:56:01987 Holtek新推出集成双通道感烟探测器AFE、双通道LED驱动、5V稳压和9V升压蜂鸣器驱动专用Flash MCU BA45F25343/BA45F25353/BA45F25363,适用于感烟探测报警器。
2025-04-27 11:26:581067 WDZA-YJY是低烟无卤阻燃A类交联聚乙烯绝缘聚乙烯护套电力电缆,以下是关于该电缆的详细介绍: 一、命名含义 WDZA:表示低烟无卤阻燃A类。 W:无卤 D:低烟 Z:阻燃 A:阻燃A类 YJY
2025-04-24 10:00:576235 未来” 为主题,集中呈现了通信与计算、车载、工业及环境、健康四大核心领域的创新突破。 在电子发烧友网记者参观期间,村田中国工作人员重点介绍了四款前沿创新方案,分别是 “不可思议的石头 echorb”、可伸缩电路板 SPC、透明 ID 标签和超声波穿透超材料
2025-04-22 00:07:002398 
深圳运算放大器需求激增,华芯邦瞄准电子烟、MEMS传感器、车载电子等赛道,以创新芯片方案抢占市场,适配智能化趋势。
2025-04-21 16:05:39501 无卤低烟阻燃交联聚烯烃绝缘电缆是一种专为安全、环保需求设计的特种电缆,其用途广泛且关键,主要应用于以下领域: 一、核心应用场景 公共建筑与基础设施 高层建筑:用于电力输配、消防系统和应急照明,确保
2025-04-03 09:55:21766 第一章 助焊 劑一‧助焊劑的四大功能助焊劑(FLUX)這個字來自拉丁文是“流動”(Flow in Soldering)的意思,但在此它的作用不祇是幫助流動,還有其他功能。助焊劑的主要功能為:(1
2025-04-01 14:12:08
集成与电能管理四大技术板块精彩亮相。通过全系列封装设备矩阵及行业首发解决方案,奥芯明向全球展示了在封装领域的突破性进展和本土化成果,彰显了公司以创新提质、助力中国半导体产业高质量发展的坚定承诺与信心。 四大技术矩阵惊艳亮相 本届展
2025-03-31 15:34:53889 
、功率、灵敏度和空中速率。在无线通信系统的设计与优化中,工作频段、发射功率、接收灵敏度、空中速率是决定性能的四大核心参数。它们相互制约又彼此关联,直接影响传输距离、数
2025-03-20 19:33:162429 
HT4089通过集成的智能功能简化了带屏电子烟的充电管理,减少了外围元件,提高了可靠性。
2025-03-19 14:04:12940 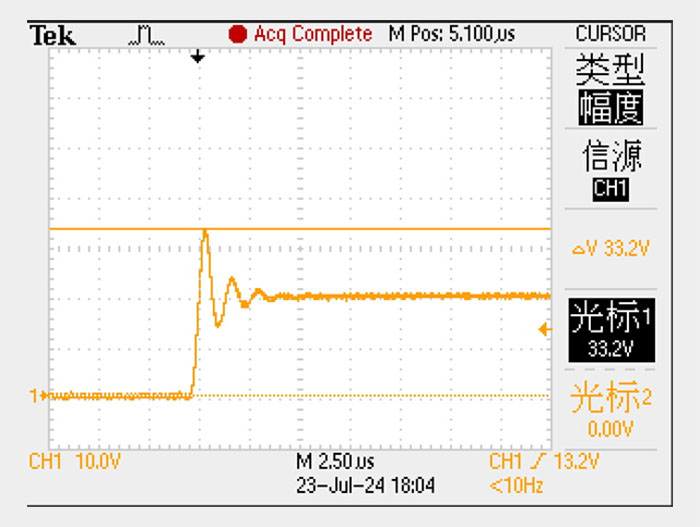
随着电子烟行业的快速发展,消费者对电子烟产品的体验要求也在不断提升,尤其是在雾化控制、吸入体验和智能化功能方面。传统的电子烟气流检测方案在灵敏度、响应速度和智能化方面存在一定的局限性,难以满足市场对高品质用户体验的需求。针对这一痛点,共达电声成功开发出业内首款可编程式MEMS微压差气流传感器。
2025-03-13 15:29:011400 
低烟无卤阻燃网线的代号是LSZH,它是“Low Smoke Zero Halogen”(低烟无卤)的英文首字母缩写,用于表示非卤化的阻燃性线缆护套材料。以下是关于低烟无卤阻燃网线代号及其相关特性
2025-02-27 10:30:153581 随着欧盟等推出禁止销售一次性电子烟政策,各电子烟品牌商开发的换弹式电子烟产品越来越多。由于电子烟产品空间结构限制以及兼容先前的结构件,各厂家都希望采用两触点换弹式电子烟方案。烟弹部分需要记录烟油
2025-02-24 17:29:301308 
%,达到201亿欧元,但西门子的整体业绩仍然表现出色。特别是在净收益方面,公司实现了同比52%的大幅增长,净收益达到39亿欧元。 这一显著增长主要得益于西门子出售茵梦达所带来的21亿欧元税后收益。此外,公司实体业务(Industrial Business)的利润总额也达到了25亿欧
2025-02-14 09:52:24631 为回馈广大新老用户,秉承着让用户以“国民价”享受 “全球车”出行体验。2月8日,奇瑞集团旗下四大品牌——奇瑞、捷途、星途和iCAR携手开启“全球车 国民价”惊喜活动,为用户提供更多优惠选择,让更多人体验全球车品质,感恩全球1572万用户的信赖与支持。
2025-02-08 11:46:49727 意法半导体第四季度实现净营收33.2亿美元,毛利率37.7%,营业利润率11.1%,净利润为3.41亿美元,每股摊薄收益0.37美元。
2025-02-06 11:22:471062 空气过滤是近些年来持续热门的话题,与公众息息相关的比如从PM10和PM2.5颗粒物过滤,到COVID-19期间的病毒过滤,空气过滤在保护公众健康方面的重要性越来越高,尤其是在封闭空间内。
2025-01-24 10:46:23868 什么是CAN总线?CAN(ControllerAreaNetwork)总线是一种用于车辆电子设备之间通信的标准协议。CAN过滤器是用来过滤CAN总线上收到的消息,从而确保只处理特定的数据帧。在CAN
2025-01-16 19:35:04784 对于过滤材料而言,凡是能使滤浆中流体通过,其所含固相颗粒被截留,以达固液分离目的的多 物都统称为过滤介质。它是过滤机上关键组成部分,它决定了过滤操作的分离精度和效率,也直接影响过滤机的生产强度及动力消耗。
2025-01-16 14:17:221802 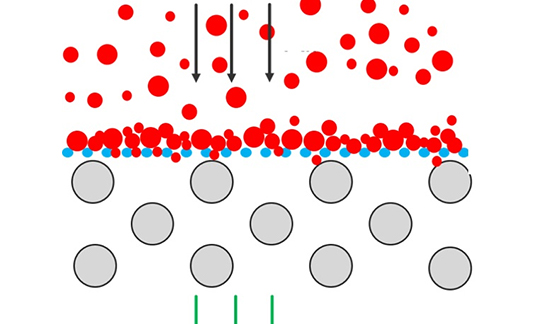
用LDO给运放或者ADC供电,运放和ADC都有PSRR,而且在低频端PSRR都高达80dB,LDO的内部噪声刚好也是低频的,按理说,运放和ADC的PSRR可以把LDO输出的内部噪声抑制的干干净净
2025-01-08 07:49:53
装置来帮助很方便地取下芯片或者器件。 对于某些有超净等特殊要求的应用, 美国 Gel- Pak 提供超净真空释放盒 VR-UC, 会在胶膜上贴一层保护膜, 这层保护膜会防止污染物 FM 在使用前污染胶
2025-01-07 10:04:38989 
 电子发烧友App
电子发烧友App
















 工商网监
工商网监
评论