 电子发烧友App
电子发烧友App



摘 要:本文通过合理选择步进电机相绕组细分电流波形,提出并介绍了基于80C196MC单片机控制的步进电机恒转矩斩波恒流细分驱动方案、技术实现及其应用。
引言
步进电机是一种将离散的电脉冲信号转化成相应的角位移或线位移的电磁机械装置,它具有转矩大、惯性小、响应频率高等优点,已经在当今工业上得到广泛的应用,但其步矩角较大,一般为1.5o~3o,往往满足不了某些高精密定位、精密加工等方面的要求。实现细分驱动是减小步距角、提高步进分辨率、增加电机运行平稳性的一种行之有效的方法。本文在选择了合理的电流波形的基础上,提出了基于Intel 80C196MC单片机控制的步进电机恒转矩细分驱动方案,其运行功耗小,可靠性高,通用性好,具有很强的实用性。
细分电流波形的选择及量化
步进电机的细分控制,从本质上讲是通过对步进电机的励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。因此,要想实现对步进电机的恒转矩均匀细分控制,必须合理控制电机绕组中的电流,使步进电机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要均匀。我们知道在空间彼此相差2p/m的m相绕组,分别通以相位上相差2p/m而幅值相同的正弦电流,合成的电流矢量便在空间作旋转运动,且幅值保持不变。这—点对于反应式步进电机来说比较困难,因为反应式步进电机的旋转磁场只与绕组电流的绝对值有关,而与电流的正反流向无关。以比较经济合理的方式对三相反应式步进电机实现步距角的任意细分,绕组电流波形宜采用如图1所示的形式。
图中,a为电机转子偏离参考点的角度。ib滞后于ia,ic超前于ia。此时,合成电流矢量在所有区间b=Ime-ja,从而保证合成磁场幅值恒定,实现电机的恒转矩运行。且步进电机在这种情况下也最为平稳。将绕组电流根据细分倍数均匀量化后,所得细分步距角也是均匀的。为了进一步得到更加均匀的细分步距角,可通过实验测取一组在通入量化电流波形时的步进电机细分步距的数据,然后对其误差进行差值补偿,求得实际的补偿电流曲线。这些工作大部分由计算机来完成。在取得校正后的量化电引言
步进电机是一种将离散的电脉冲信号转化成相应的角位移或线位移的电磁机械装置,它具有转矩大、惯性小、响应频率高等优点,已经在当今工业上得到广泛的应用,但其步矩角较大,一般为1.5o~3o,往往满足不了某些高精密定位、精密加工等方面的要求。实现细分驱动是减小步距角、提高步进分辨率、增加电机运行平稳性的一种行之有效的方法。本文在选择了合理的电流波形的基础上,提出了基于Intel 80C196MC单片机控制的步进电机恒转矩细分驱动方案,其运行功耗小,可靠性高,通用性好,具有很强的实用性。

图1 反应式步进电机绕组电流波形

图2 硬件系统原理框图
细分电流波形的选择及量化
步进电机的细分控制,从本质上讲是通过对步进电机的励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。因此,要想实现对步进电机的恒转矩均匀细分控制,必须合理控制电机绕组中的电流,使步进电机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要均匀。我们知道在空间彼此相差2p/m的m相绕组,分别通以相位上相差2p/m而幅值相同的正弦电流,合成的电流矢量便在空间作旋转运动,且幅值保持不变。这—点对于反应式步进电机来说比较困难,因为反应式步进电机的旋转磁场只与绕组电流的绝对值有关,而与电流的正反流向无关。以比较经济合理的方式对三相反应式步进电机实现步距角的任意细分,绕组电流波形宜采用如图1所示的形式。
图中,a为电机转子偏离参考点的角度。ib滞后于ia,ic超前于ia。此时,合成电流矢量在所有区间b=Ime-ja,从而保证合成磁场幅值恒定,实现电机的恒转矩运行。且步进电机在这种情况下也最为平稳。将绕组电流根据细分倍数均匀量化后,所得细分步距角也是均匀的。为了进一步得到更加均匀的细分步距角,可通过实验测取一组在通入量化电流波形时的步进电机细分步距的数据,然后对其误差进行差值补偿,求得实际的补偿电流曲线。这些工作大部分由计算机来完成。在取得校正后的量化电流波形之后,以相应的数字量存储于EEPROM中的不同区域,量化的程度决定了细分驱动的分辨率。
斩波恒流细分驱动方案及
硬件实现
斩波恒流细分驱动方案的原理为:由单片机输出EEPROM中存储的细分电流控制信号,经D/A转换成模拟电压信号,再与取样信号进行比较,形成斩波控制信号,控制各功率管前级驱动电路的导通和关断,实现绕组中电流的闭环控制,从而实现步距的精确细分。系统原理框图如图2所示。
控制电路
控制电路主要由80C196MC单片机、晶振电路、地址锁存器、译码器、EEPROM存储器及可编程键盘/显示控制器Intel-8279等组成,受控步进电机的细分倍数、运行脉冲频率、正反转、运行速度、单次运行线位移、启/停等的控制,既可由键盘输入,也可以通过串行通信接口由上位机设置。状态显示提供当前通电相位、相电流大小、电机运行时间、正反转、当前运行速度、线位移及相关计数等信息显示,并将工作状态和数据传送给上位机。传感器(霍尔传感器)用于检测计数器的当前值。单片机是控制系统的核心其主要功能是输出EEPROM中存储的细分电流控制信号进行D/A转换。根据转换精度的要求,D/A转换器既可以选择8位的,亦可选择12位的。本控制系统选用的是8位D/A转换器MAX516,MAX516把4个D/A转换器与4个比较器组合在单个的CMOS IC上,4个D/A转换器共享一个参考输入电压VREF。每个转换器的输出电压均可采用下式表示:
VDACi=VREFN/256
N=0,l,......,255,对应于8位的DAC的输入码D0—D7(此处为细分电流控制信号)。通过调节VREF的变化范围,便可调节步进电机绕组中电流的幅值。
功率驱动电路
工作中,步进电机细分电流控制信号的D/A转换值Ui输入到MAX516内部各比较器COMPi的同向输入端,绕组电流取样信号Vi输入到COMPi的反向输入端。斩波恒流驱动采用固定频率的方波与比较器输出信号调制成斩波控制信号,控制绕组的通电时间,使反馈电压Vi始终跟随D/A转换输出的控制电压Ui。合理选择续流回路就可使绕组中的电流值在一定的平均值上下波动,且波动范围不大。
调制用方波信号频率为21.74KHz,由80C196MC的P6.6/PWM0端产生,且各相是同频斩波,不会产生差拍现象,所以消除了电磁噪声。为防止因比较器漂移或干扰导致功率开关管误导通,让斩波控制信号和相序控制信号相与后控制功放管。
当开关管截止时,并联RC、快恢复续流二极管D、绕组L及主电源构成泄放回路。与单纯电阻释能电路相比,RC释能电路使功耗和电流纹波增加较小,而电流下降速度大大加快。电流取样信号由精密电流传感放大器MAX471完成。当绕组电流流过其内部35mΩ精密取样电阻时,经内部电路变化,转换为输出电压信号:
VOUT=ROUT×(ILOAD×500mA/A)
其中ROUT为MAX471外部调压电阻,阻值按设计要求选定。ILOAD为流过精密电阻的相绕组电流。MAX471同时具有电流检测与放大功能,从而大大方便了整个电路的设计与调试。
功率开关管(功放管)是功放电路中的关键部分,影响着整个系统的功耗和体积。由于所设计的驱动器主要用来驱动额定电流3A、额定电压27V以下的步进电机,故选用高频VMOS功率场效应晶体管IRF540(VDS=100V,RDS(on)=0.052W,ID=27A)作为开关管。IRF540导通电阻很小,因此,即使电机长时间运转,该VMOS管壳本身的温度也比较低,无须外加风扇。
为了提高步进电机的工作可靠性,消除电机电感性绕组的串扰,本系统无论从驱动部分还是反馈部分都进行了隔离。驱动隔离采用高速光电耦合器6N137为隔离元件,一方面可以实现前级控制电路同步进电机绕组的隔离;另一方面使功率开关管的驱动变得方便可靠。反馈通道的滤波部分采用无源低通滤波器,其作用是高速衰减绕组(电感线圈)在开关时截止频率以上的瞬时高频电压信号,从而避免控制电路做出太迅速的反应,可以有效地防止步进电机的振荡。线性光耦合电路的作用是将滤波后的采样电阻反馈信号线性地传输给比较器。
软件设计
步进电机细分驱动系统的软件主要由主控程序、细分驱动程序、键处理程序、显示数据处理及显示驱动程序、通信监控程序等部分组成。
细分驱动电路的主控制程序控制整个程序的流程,主要完成程序的初始化、中断方式的设置、计数器工作方式的设置及相关子程序的调用等。初始化包括8279各寄存器、8279的显示RAM、80C916MC的中断系统及内部RAM等。在80C196MC的各中断中,使用了INT15、INT14和INT13这三个中断,其中,INT15为高优先级。在运行状态下,当有停止键按下时,则INT15中断服务程序将T1关闭,从而使步进电机停止。T1控制每一步的步进周期,该服务程序基本上只作重置定时器和置标志位的操作,而其它操作均在主程序中完成。主程序流程图见本刊网站。
细分驱动程序中,细分电流控制信号的输出采用单片机片内EEPROM软件查表法,用地址选择来实现不同通电方式下的可变步距细分,从而实时控制步进电机的转角位置。其流程图如图4所示。
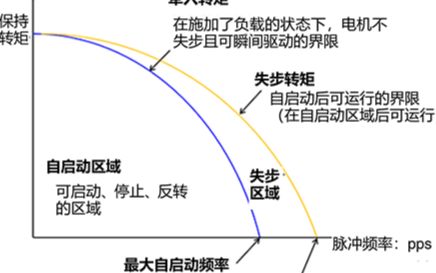
步进电机的正反转控制是通过改变电机通电相序来实现的。为达到对步进电机启/停运行过程的快速和精确控制,从其动力学特性出发,推导出符合步进电机矩频特性的曲线应该是指数型运行曲线,并将这一曲线量化后,存入EEPROM。步进电机在运行过程中,每个通电状态保持时间的长短,由当前速度对应的延时时间值决定。

图3 步进电机细分驱动控制主程序流程图
结语
本文提出并实现的步进电机均匀细分驱动系统,最高细分达到256细分,能适应大多数中小微型步进电机的可变细分控制、较高细分步距角精度及平滑运行等要求。大量新型元器件的采用,使所设计的驱动器具有体积小、细分精度高、运行功耗低、可靠性高、可维护性强等特点。系统软件功能丰富,通用性强,从而使控制系统更加灵活。
该驱动控制系统已经用于“全自动高精度线材切割机”的驱动控制系统中,实现了较高的稳速精度和切割精度,惯性小,运行可靠,取得了满意的效果。
- 机恒转矩(5205)


基于80C196KB的远程测控终端的设计
 2800
2800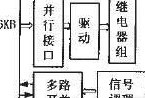
步进电机与伺服电机对比分析
2378
恒转矩调速方式和恒功率调速方式
恒转矩负载应该用什么控制方式的变频器
步进电机14问
步进电机中的力矩、转矩与扭矩有什么区别
步进电机基础-步进电机的原理与特性之基础理论
步进电机是如何增加动态转矩的?有什么方法吗
步进电机的脉冲频率与转矩的数学关系是什么?
二相混合式步进电机电磁转矩的原理是什么?
什么叫步进电机的牵入转矩?
伺服电机和步进电机在性能上有哪些差异?
变频器在低频下的恒转矩输出?
恒兴隆机电:深圳恒转矩雕铣电主轴有什么功能特点?
恒功率电主轴与恒转矩电主轴相比哪种好?深圳厂家
想做一个近似恒转矩的单相交流电机调速器
用80C51单片机设计一个步进电机控制器
基于80C196KC的粮食烘干塔水分在线检测系统
 20
20基于80196 与PBL3717 的步进电机控制介绍系统
4887C196MC与IPM模块组成的变频调速系统
62Intel16位单片机的特殊串行通讯方式
2480C196MC 的外设事务服务器及其应用
1380C196 单片机和CPLD在光电轴角编码器中的应用
29基于80C196KC单片机的F/V 转换器的设计
30基于80C196MC的步进电机斩波恒流均匀细分电路的实现
32基于80196与PBL3717的步进电机控制系统
2980C196单片机多功能教学实验板的开发与研制
44以单片微机87C196MC为核心的电梯门机变频调速控制系统
83基于80C196KC的直流电机PWM调速控制器的设计与应用
135基于80C196KC和80C196MC双单片机的通用伺服控制
54MC33991型二相步进电机驱动器
64基于MC56F8323的步进电机高速细分驱动模块
8180C196MC单片机实现多处理机互联技术应用
23基于80C196的频率测量及在电压采样中的应用
1465
基于87C196KC单片机的步进电机高灵敏度控制系统
1447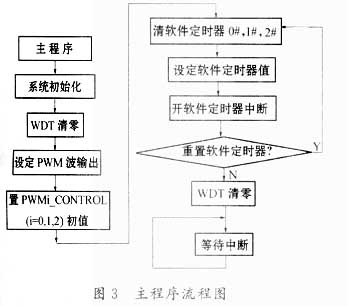
基于80C196的频率测量及在电压采样中的应用
1030Intel80C196MC微处理器在静止逆变电源中的应用
1428
80C196MC单片机波形发生器原理及其在逆变电源中的应用
2593
TMS320C31和80C196双CPU构成的高速实时控制系
1781
什么是保持转矩(HOLDING TORQUE)?
11362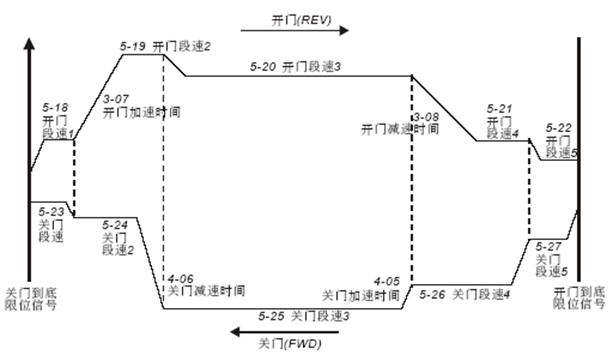
基于80C196KC设计的5kW高频通信电源整流及监控系统
1493
步进电机的选购方法
1361IPM门极驱动隔离电路
3523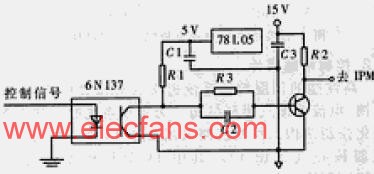
基于80C196MC的可控硅中频电源控制技术的研究
10380C196MC在交流电机变频器中的应用
272恒转矩中编码器的作用
1633步进电机保持转矩与定位转矩概念解析
23914
基于80C196KC和L298N的直流电机PWM控制技术
6812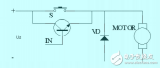
高转矩双极性步进电机驱动器的解决方案详细中文概述
15什么是步进电机?步进电机的特点,分类与原理!
39730
以80C196MC单片机为控制核心的步进电机恒转矩斩设计
2069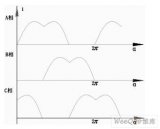
步进电机怎么选型
39146步进电机转矩的选择
15311MC100EP196B 具有FTUNE的3.3 V ECL可编程延迟芯片
MC100EP196 3.3 V ECL可编程延迟芯片

步进电机静态转矩特性的测量方法
6039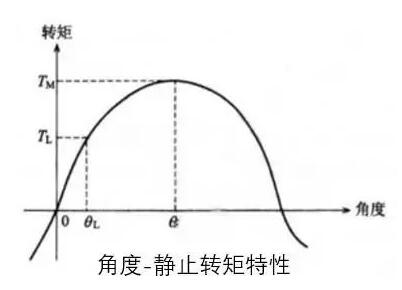
步进电机在高速时增加转矩的方法
6849
步进电机的主要特性与基本特性
13009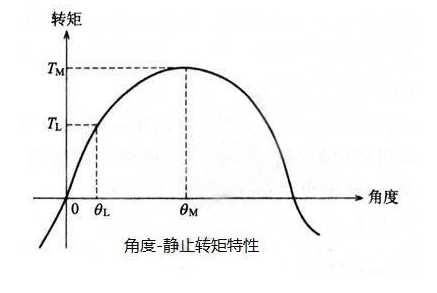
步进电机选型的步骤及步进电机选型方法
2885880C196MC单片机波形发生器原理及其在逆变电源中的应用
15基于80C196KB单片机实现A/D采集及数据处理系统的设计
2878
如何使用FPGA实现步进电机细分驱动器
28步进电机的特性介绍
9180
80C196MC单片机波形发生器原理及其在逆变电源中的应用
480C196KC单片机开关稳压电源的设计
12
步进电机的基本特性
2064
步进电机增加动态转矩的解决方法
0步进电机的原理与特性之基本特性
2选用步进伺服电机替换步进电机,有什么优势?
1360
步进电机可以配什么减速机?
2865变频器恒功率与恒转矩的区别
11118变频调速应用于恒转矩负载时应注意哪些问题?
830
变频电机的恒转矩运行和恒功率运行
395
- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 张迎辉:mikezhang@elecfans.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1
评论