 Apollo开放全长380km点云数据集,助推厘米级精度定位实现
Apollo开放全长380km点云数据集,助推厘米级精度定位实现

作为全球最大最活跃的自动驾驶开放平台,Apollo不断创新,持续拓展着自动驾驶行业边界。在聚焦赋能量产的Apollo5.0重磅面世之后,日前,Apollo在“数据开放”的大道上再次实现飞跃,向开发者开放一组总里程达 380km 的点云数据集,并在该数据集上验证了基于深度学习的激光点云自定位算法带来的“厘米级定位精度”的实现。
据了解,针对自动驾驶中的自定位问题,百度提出了一套基于深度学习的激光点云自定位算法。该算法使用不同类型的网络结构对传统方法中的各功能模块进行替代。
同时,为了验证算法的有效性,百度在 Apollo 平台开放了一组总计约 380km 的数据集,该数据集包含了制图、训练、测试三个子集,涵盖了城市道路,园区内部道路以及高速公路等多种场景,地图和测试集之间的最长时间跨度达一年。
通过点云数据集进行验证的基于深度学习的激光点云自定位算法以及相关技术出自论文《L3-Net:Towards Learning based LiDAR Localization for Autonomous Driving》,这篇论文收录在今年 6 月份在美国洛杉矶长滩市举行的国际顶会 CVPR 2019里。

根据论文内容,此项技术方案的领先性主要有:
提出了全球范围内首个基于深度学习的自动驾驶自定位技术解决方案,可以准确地估计车辆的位置和姿态,实现了厘米级精度的定位效果。
使用不同的网络结构拆解取代传统激光点云定位的技术流程,并将其串联起来统一训练,使网络能够以"端到端"的方式完成在线激光点云定位任务。

▲传统激光点云定位技术
定位作为自动驾驶的基础模块之一,一直是行业研发热点。现有的传统激光点云定位技术包含了特征提取、特征匹配和时序优化等模块(如上图所示)。整个算法的输入包括实时在线激光点云、定位地图以及来自惯性传感器的初始预测的定位位置和姿态,最后的输出则是定位算法优化之后的位姿结果。
尽管上述方案已经取得了目前最佳的定位效果,但是这类人工设计的算法在进行特征提取和匹配时,对环境的变化非常敏感。导致在动态变化的环境中无法最智能地捕捉环境中不变的信息(例如,地标、路牌等),从而无法实现对自身位置的高精度高鲁棒性的估计。这意味着,由于环境变化的剧烈程度,实际应用中需要经常对定位地图进行更新,成本也将上升。
与传统方案不同的是,基于深度学习的激光定位系统在模块上有了改变,它需要一个预先建立的激光点云定位地图、在线激光点云以及惯性传感器的预测位姿作为输入。其中预建的激光点云定位地图是通过离线制图算法对多次采集的同一区域的点云数据进行融合,并使用点云识别算法剔除动态地物得到。在线点云是由自动驾驶车辆上安装的激光雷达设备在行驶过程中采集获得,而预测位姿则由上一帧定位结果加上惯性传感器或者车辆运动模型估计的增量运动来进行递推。这个定位框架通过最小化在线点云和地图的匹配距离,优化预测位姿从而获得定位结果。
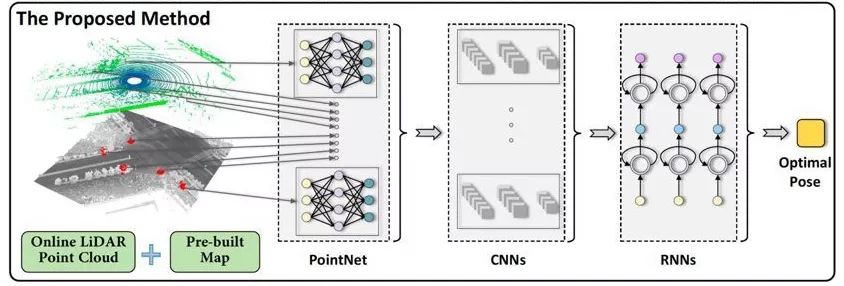
▲基于深度学习的无人车激光自定位技术:L3-Net
百度提出的方案如上图所示。对传统方法中各个流程使用不同类型的网络结构进行改造,进而实现了开创性的基于深度学习的无人车激光自定位技术:L3-Net。与传统方法流程相比,L3-Net 使用PointNet 网络来实现特征提取,再使用3D CNNs 网络进行特征匹配和优化,最终使用RNNs 网络完成时序上的平滑。
L3-Net实质上是基于学习的激光自定位网络架构。如下图所示,该网络通过两个阶段进行训练,第一阶段训练只包含了黑色箭头部分,包括关键点选择、特征提取以及基于 3D CNNs 的特征匹配;第二阶段训练包含了青色箭头的部分,这一阶段训练包含了用于时序平滑的 RNNs 网络。
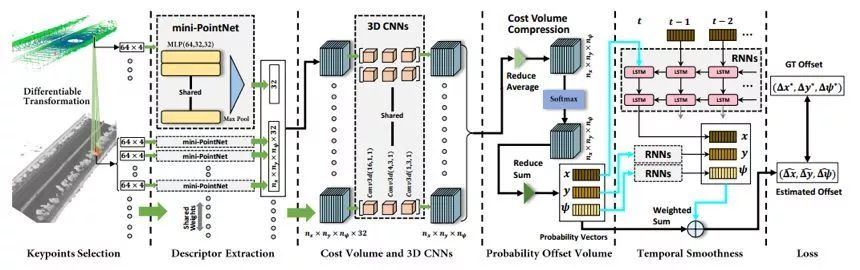
▲基于学习的激光自定位网络架构 L3-Net算法流程
目前,点云定位数据集面向所有开发者开放,通过以下操作即可获取相关数据。
进入Apollo首页,并点击【开放平台】中的【数据平台】,或直接访问数据开放平台地址:http://data.apollo.auto/?locale=zh-cn&lang=en。找到【标注数据】栏目下的【阿波罗加州南湾点云定位数据集】即可。
点击进入数据集详情页,选择右上角【查看使用手册】,可以查看详细的数据集说明和使用说明。
如上图所示,点击【样例数据】可以下载少量的样例数据,用于具体理解数据格式。点击【申请使用】,则可以申请获得在云端使用数据集中大量数据的资格。
自2017年百度推出Apollo开放平台以来,Apollo一直秉承“开放能力 共享资源 加速创新 持续共赢”的理念和精神,为开发者们提供无门槛的自动驾驶开放平台,无论是数据平台、感知平台、安全平台还是解决方案,Apollo开放平台将一直为有需要的小伙伴敞开。未来,Apollo期待与更多开发者携手同行。
-
自动驾驶
+关注
关注
795文章
15069浏览量
182057 -
Apollo
+关注
关注
5文章
351浏览量
19821
原文标题:Apollo开放全长380km点云数据集 助推厘米级精度定位实现
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

特高压巡检神器:云翎智能厘米级高精度定位工作记录仪破解复杂地形施工难题

厘米级定位筑牢安全防线:云翎智能高精度工作记录仪实现电网施工风险“透明化”管控

云翎智能厘米级高精度定位工作记录仪:为铁路巡检筑起“数字安全防线”
从厘米到毫米:云翎智能RTK高精度定位解决方案推动铁路巡检施工精度革命
云翎智能国网电力单北斗高精度定位巡检记录仪如何重塑电力巡检安全标准

铁路施工安全新防线:云翎智能高精度定位记录仪为施工巡检提供厘米级精准保障

5G+UWB融合定位:云翎智能RTK高精度定位记录仪重塑铁路段巡检智能化监管

云翎智能高精度人员定位工作记录仪助力铁路隧道施工实现零事故目标

厘米级定位赋能隧道攻坚:云翎智能高精度铁路工作记录仪如何破解铁路施工“盲区”难题

云翎智能铁路人员高精度工作记录仪适配多场景厘米级定位解决方案

真点科技高精度定位服务助力割草机器人规模应用

铁路巡检升级:云翎智能高精度执法记录仪+指挥调度系统实现故障秒级响应

MESH自组网赋能森林防火:云翎智能无线自组网厘米级定位与实时火情传输




评论